NACHI(那智)
本节介绍如何主控 NACHI 机器人。
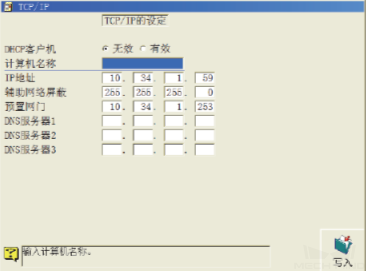
建立网络连接

烧录文件至机器人中
准备工作
将 NACHI 机器人的烧录文件(位于梅卡曼德系统软件安装目录下 Mech-Center/Robot_Server/Robot_FullControl/nachi)拷到 U 盘中。
| MZ12-01-A.120 文件需修改为对应型号的文件名。例如 SRA166-1 型号的机器人烧录时,需修改为 SRA166-1-A.120,修改完成后再将烧录文件夹拷入 U 盘。 |
开始烧录
-
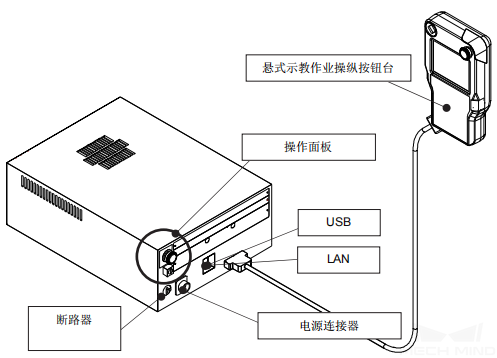
将 U 盘插入示教器背面,如下图所示。

-
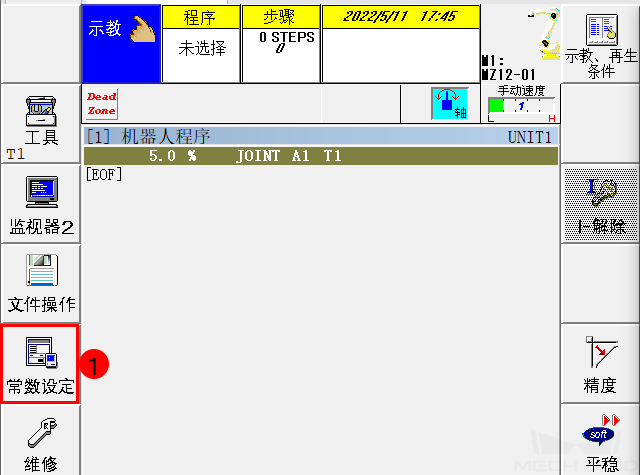
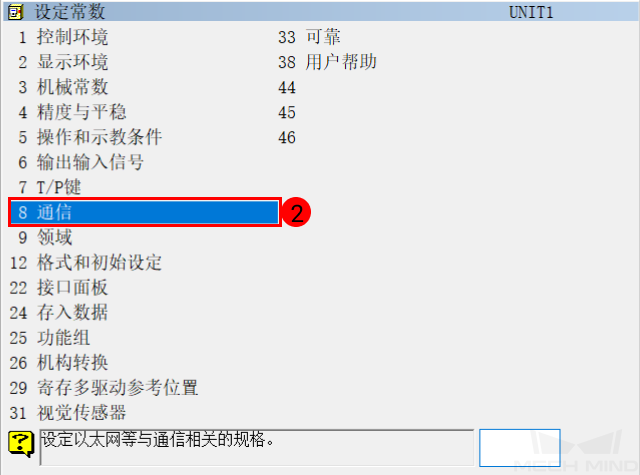
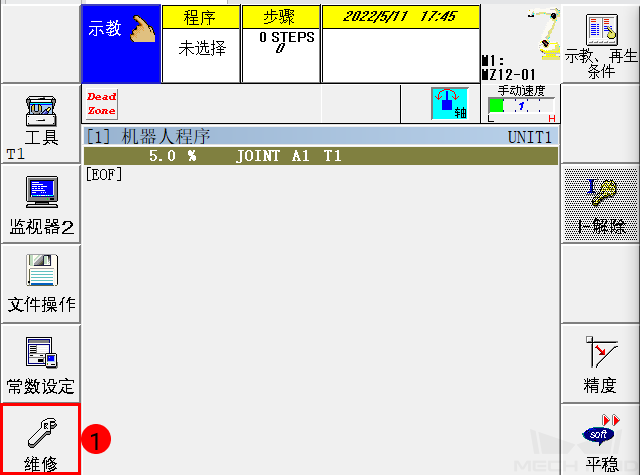
在示教器主界面,依次单击。
-
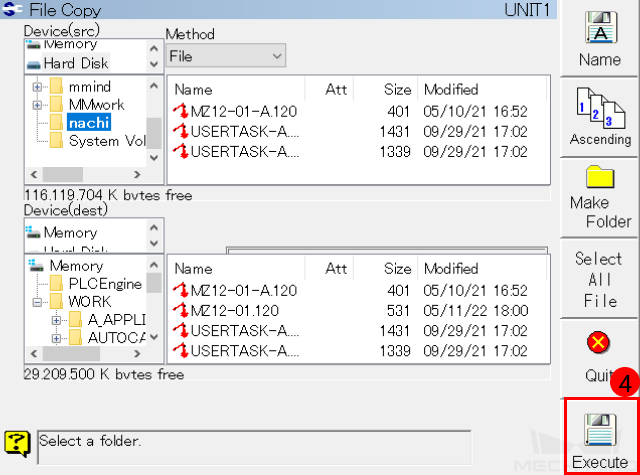
Device (src) 为 U 盘文件夹,选择烧录文件所在的文件夹;Device (dest) 选择内部储存器 PROGRAM 。光标移动至程序栏,单击 Select All File 。
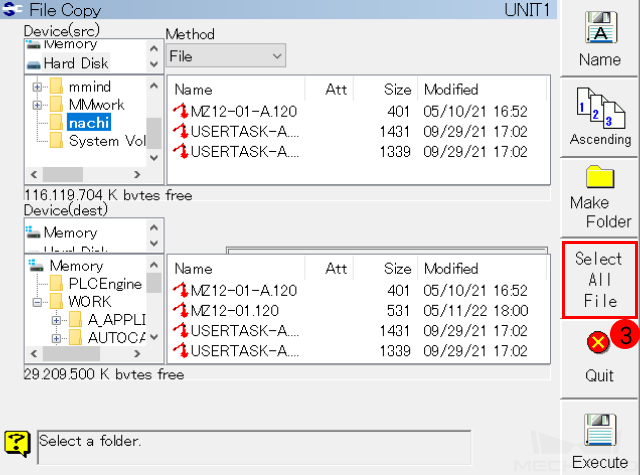
示教器为触屏屏幕,可手动点击屏幕进行操作。 -
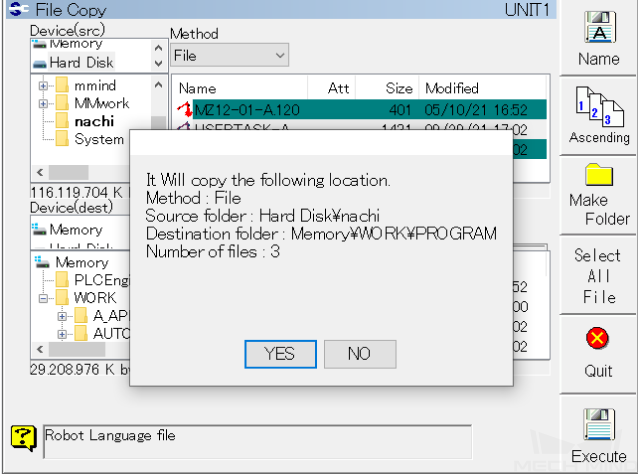
单击 Execute ,导入文件。
-
当出现如下信息时,烧录完成。
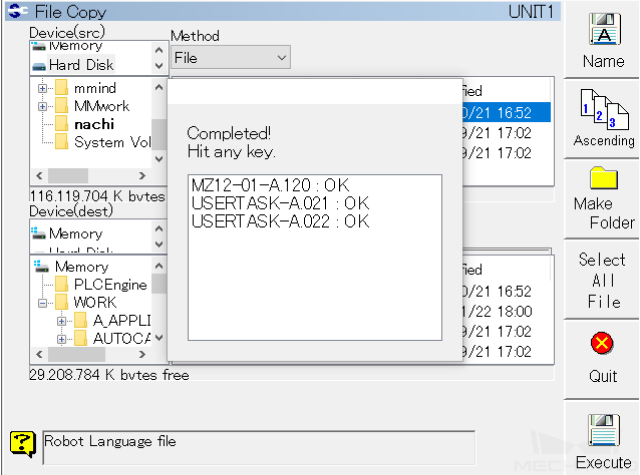
退出程序后需重启机器人。
编译程序
-
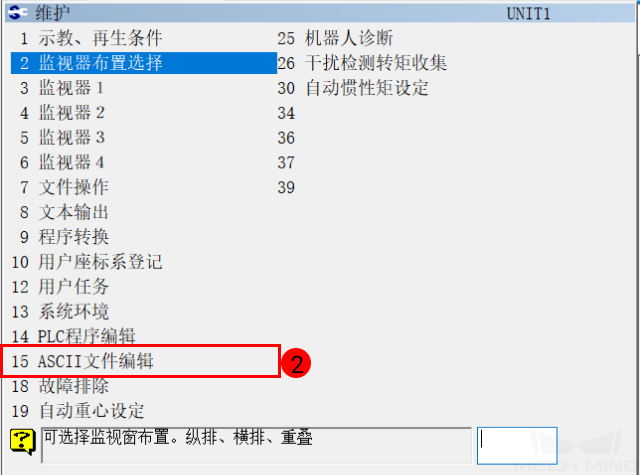
返回主界面,依次单击进入 ASCII文件编辑 界面。
-
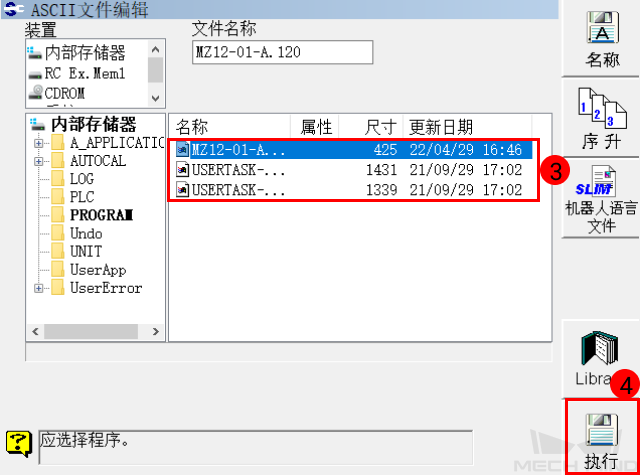
选中文件,单击 Execute ;三个文件均需执行此操作,且文件需执行完成之后才能执行下一个。
-
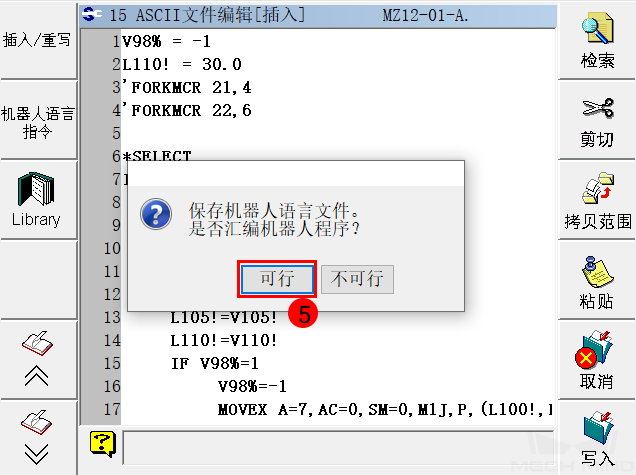
执行后弹出如下提示框,单击 可行 。
-
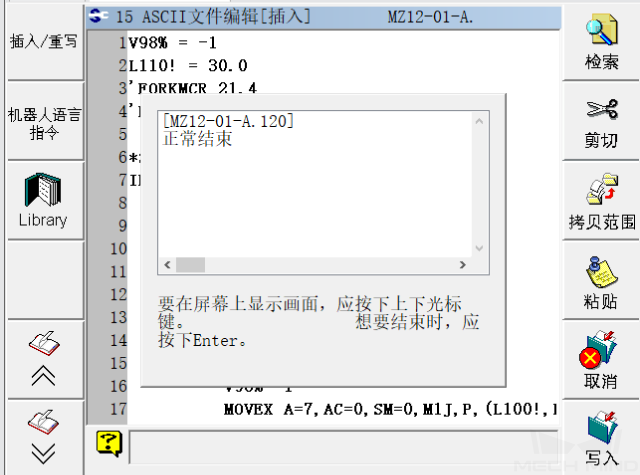
编译成功后,出现如下提示。
运行程序
-
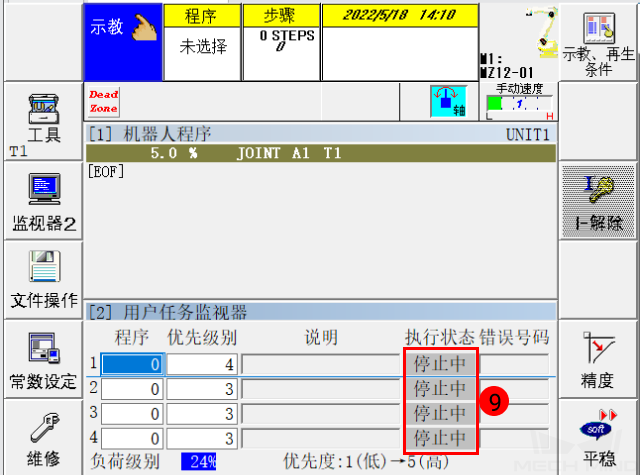
返回主界面,依次单击。
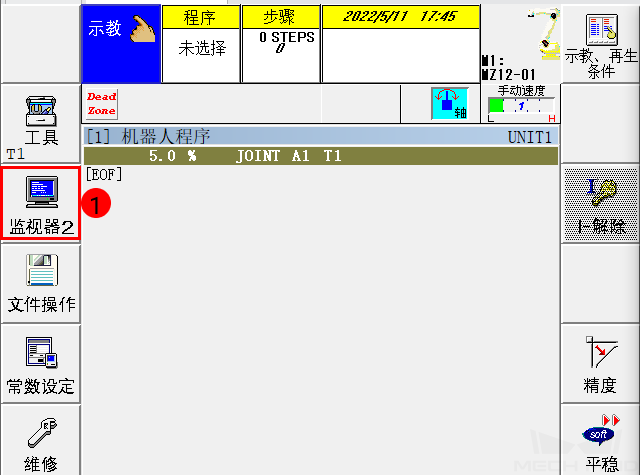
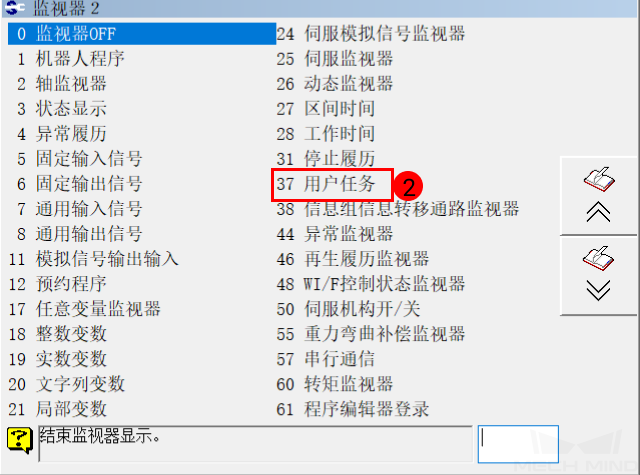
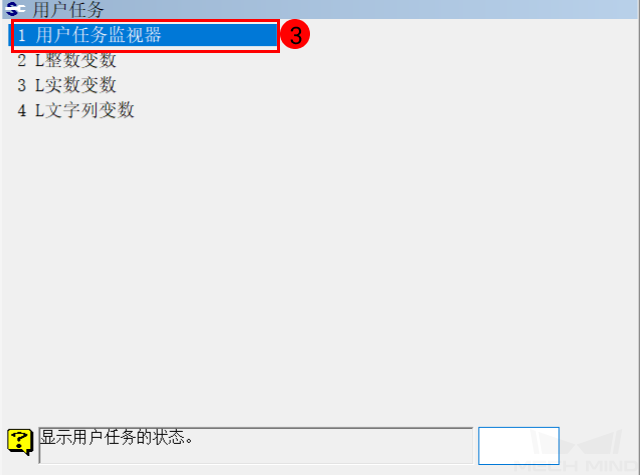
-
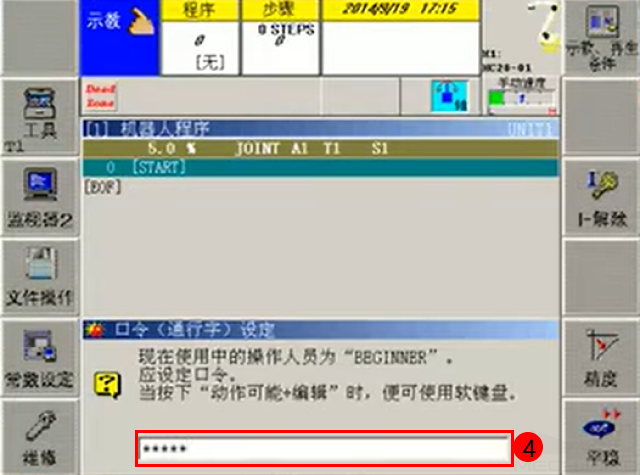
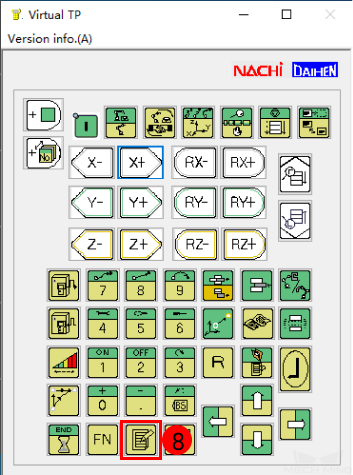
用户任务监视器如下图 ④ 所示。单击示教器上的 编辑
 , 用户任务监视器 窗口栏 (⑥)变为橙色,此时为可编辑状态。在程序栏 1 中填写 21, 程序栏 2 中填写 22,完成后单击 编辑 退出编辑状态。
, 用户任务监视器 窗口栏 (⑥)变为橙色,此时为可编辑状态。在程序栏 1 中填写 21, 程序栏 2 中填写 22,完成后单击 编辑 退出编辑状态。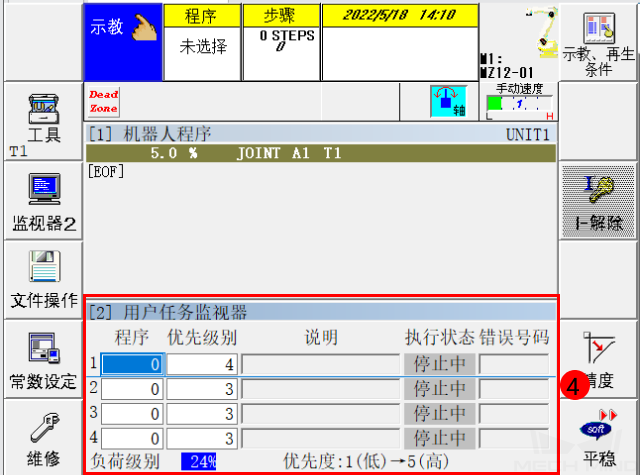

如果机器人运动卡顿,将 21 号程序的优先级别从 4 改至 5 。 -
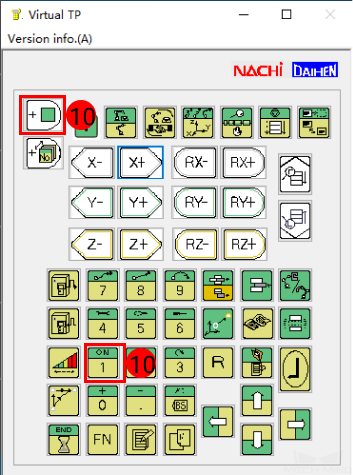
将光标移动至 执行状态 栏,同时按住 动作可能
 与 数字键 1
与 数字键 1
 。
。
-
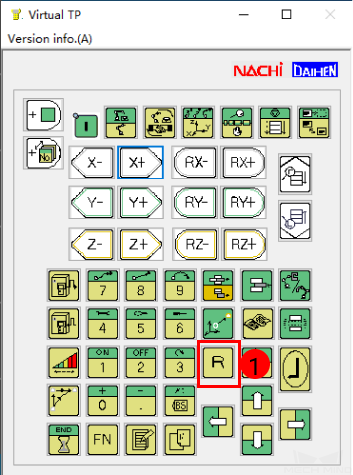
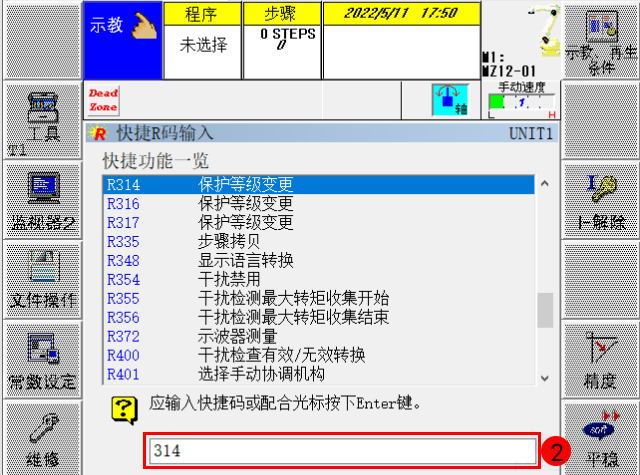
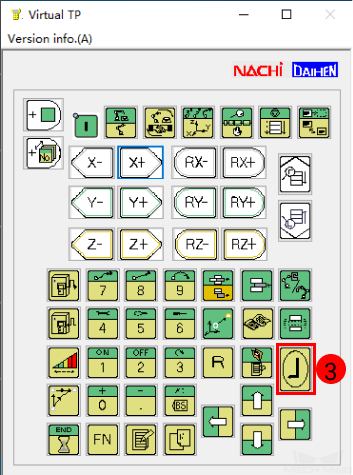
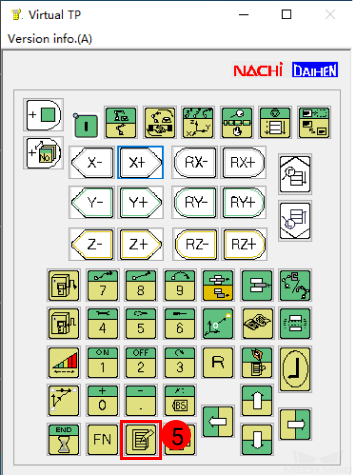
依次单击,输入 120 ,再单击 回车键
 。程序窗口显示从 U 盘导入的执行程序。
。程序窗口显示从 U 盘导入的执行程序。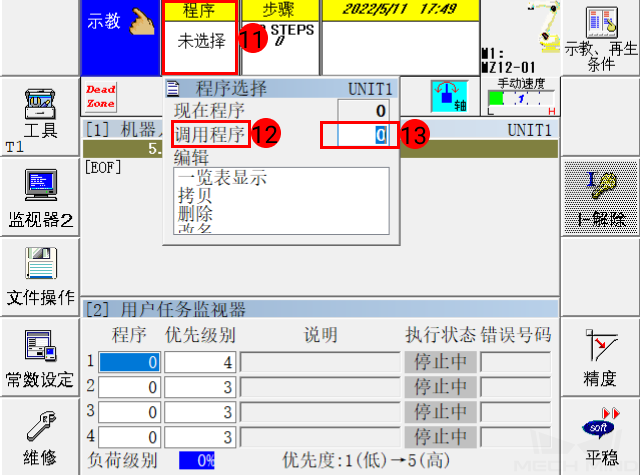
上电运行
Nachi 机器人有两种控制柜,分别为 FD 控制柜和 CFD 控制柜。
-
对于 FD 控制器,执行以下操作。
-
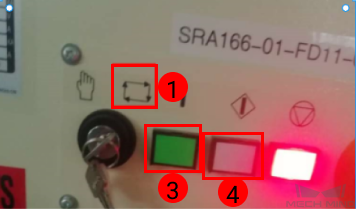
旋转控制柜钥匙,使其对准标注位置①。
-
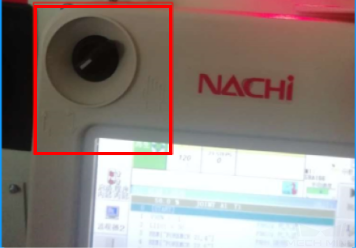
旋转示教器旋钮至下图所示位置。然后依次单击绿色按钮与白色按钮,机器人上电运行。
-
-
对于 CFD 控制器,执行以下操作。
-
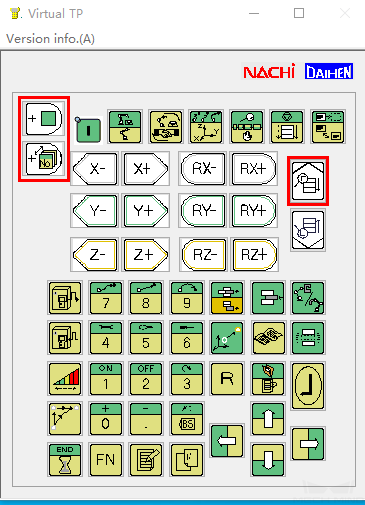
旋转示教器旋钮至下图所示位置。
-
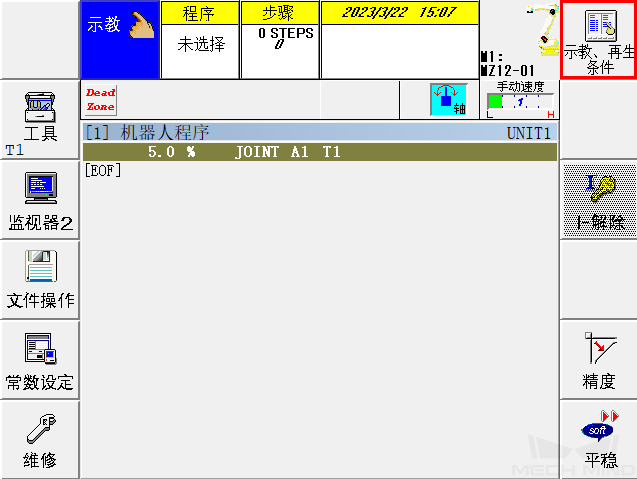
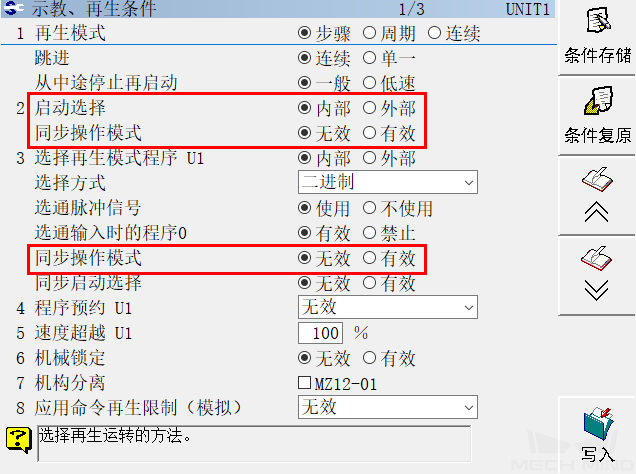
点击右上角“示教、再生条件”。
-
启动选择 设置为 内部, 同步操作模式 设置为 无效 。
-
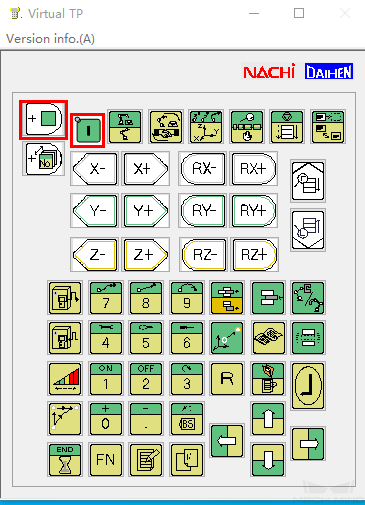
同时按下 动作可能 和 I 后,I键指示灯处于点亮状态。
-
同时按下 动作可能 、 上档 和 前进检查 后,在程序窗口中,蓝条滚动,表明程序启动并运行。
-
| 机器人主控程序烧录完成后,可启动 Mech-Center,连接机器人。 |
测试机器人连接状态
请参阅 测试机器人连接状态。