通信方式选择
在实际部署时,通常需要先收集项目的功能需求、通信对象和通信协议,然后根据项目功能需求、通信对象和通信协议确定通信方式。
下图展示了通信方式的选择流程。
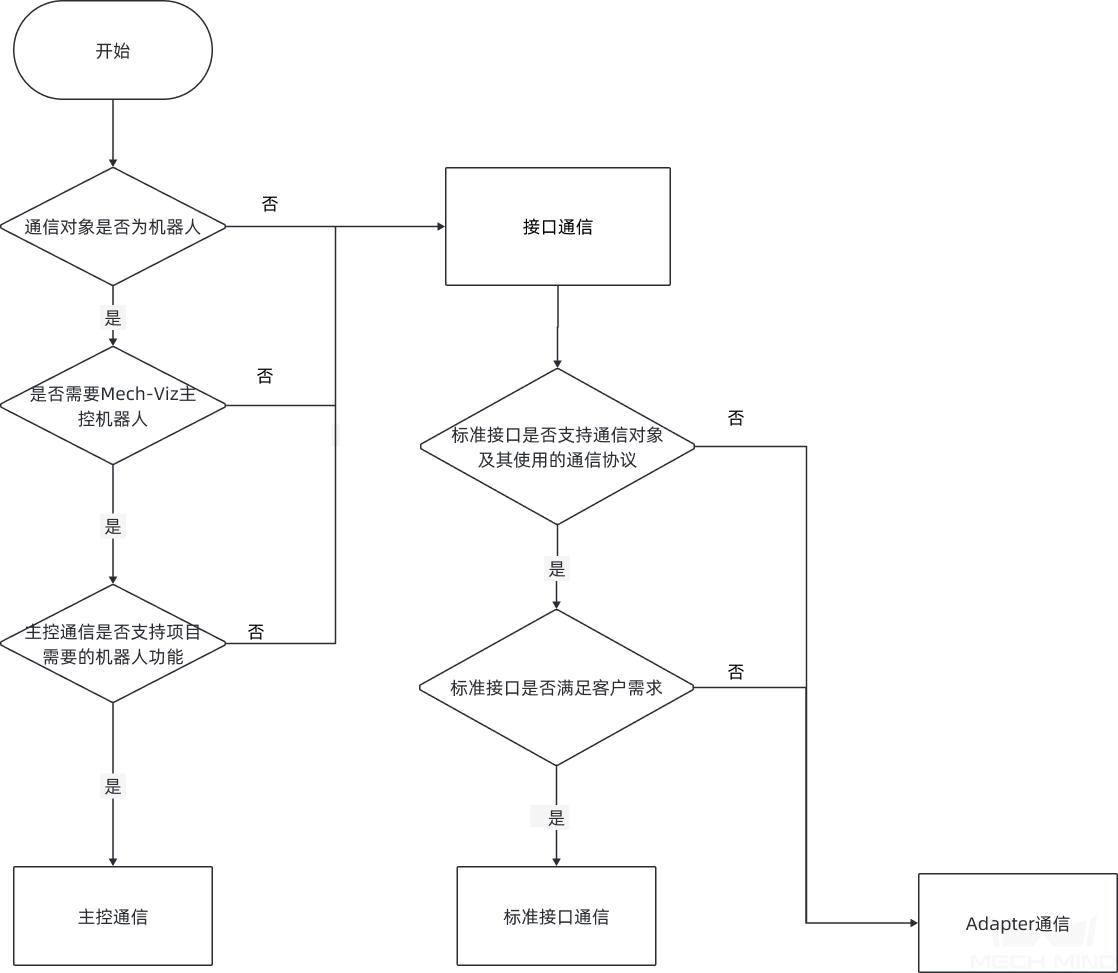
在选择通信方式时,首先确定使用主控通信或是接口通信。如果要使用接口通信,再进一步确定使用标准接口通信或是 Adapter 通信。
确定主控通信或是接口通信的流程如下:
-
判断通信对象是否为机器人。
-
如果是,执行下一步;
-
如果否,使用接口通信。
-
-
判断项目是否需要使用 Mech-Viz 主控机器人。
-
如果是,执行下一步;
-
如果否,使用接口通信。
-
-
判断主控通信方式是否支持项目需要的机器人功能,例如机器人碰撞后原路返回。
-
如果是,使用主控通信;
-
如果否,使用接口通信。
-
确定标准接口通信或是 Adapter 通信的流程如下:
-
判断标准接口通信是否支持通信对象及使用的通信协议。
-
如果是,执行下一步;
-
如果否,使用 Adapter 通信。
-
-
判断标准接口通信是否满足项目功能需求。
-
如果是,使用标准接口通信;
-
如果否,使用 Adapter 通信。
-