主控通信配置(Elite EC)
本节介绍如何主控 Elite EC 系列机器人。
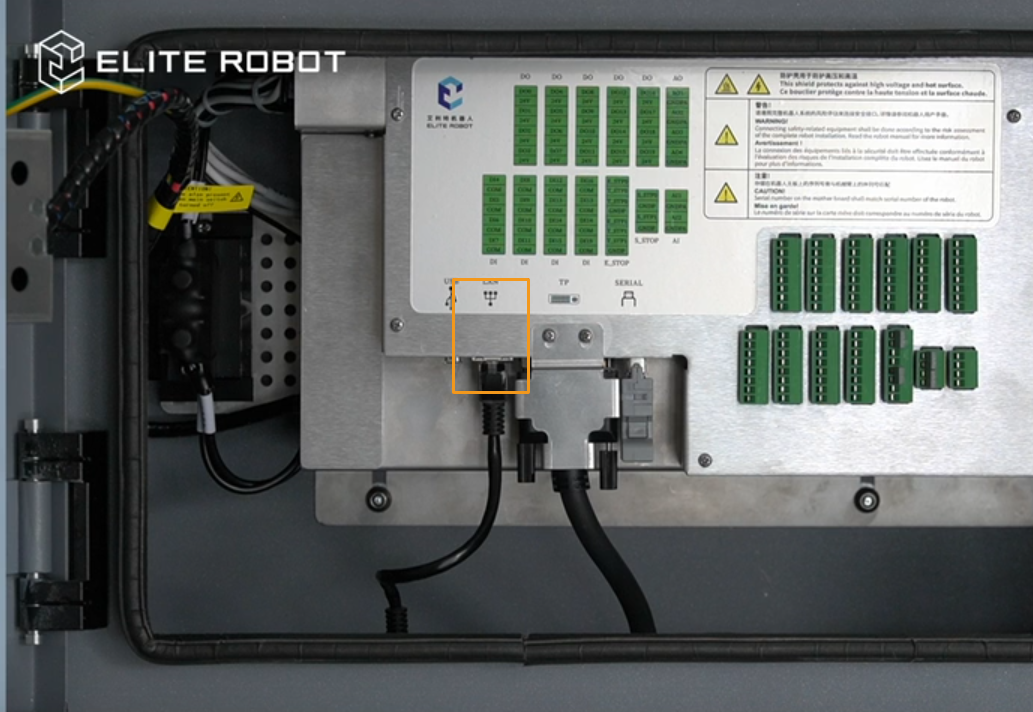
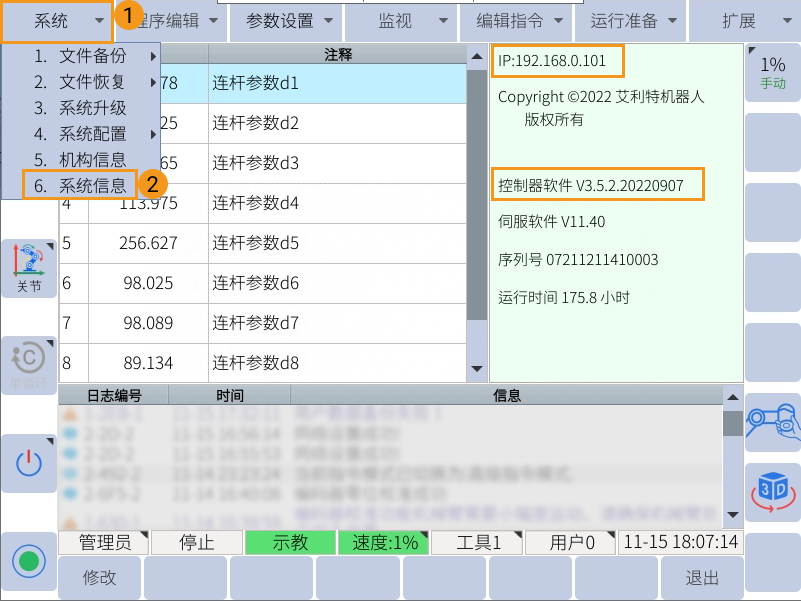
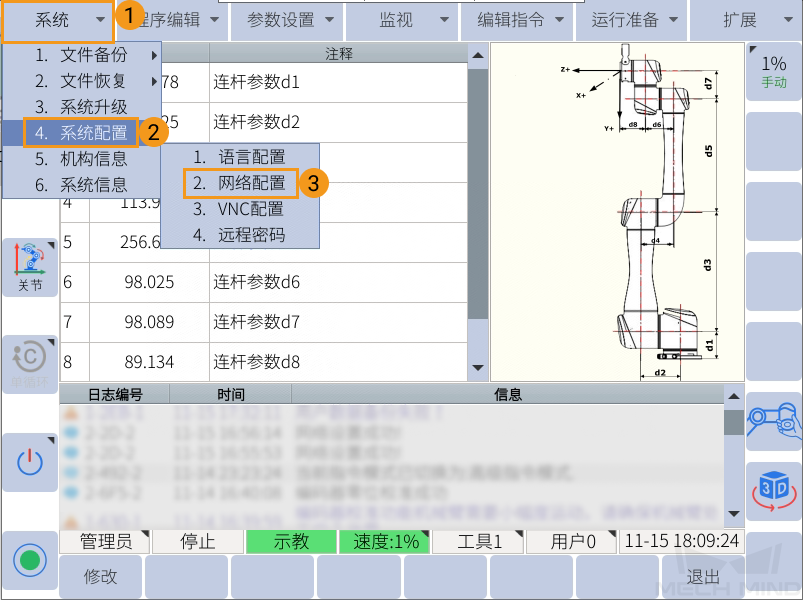
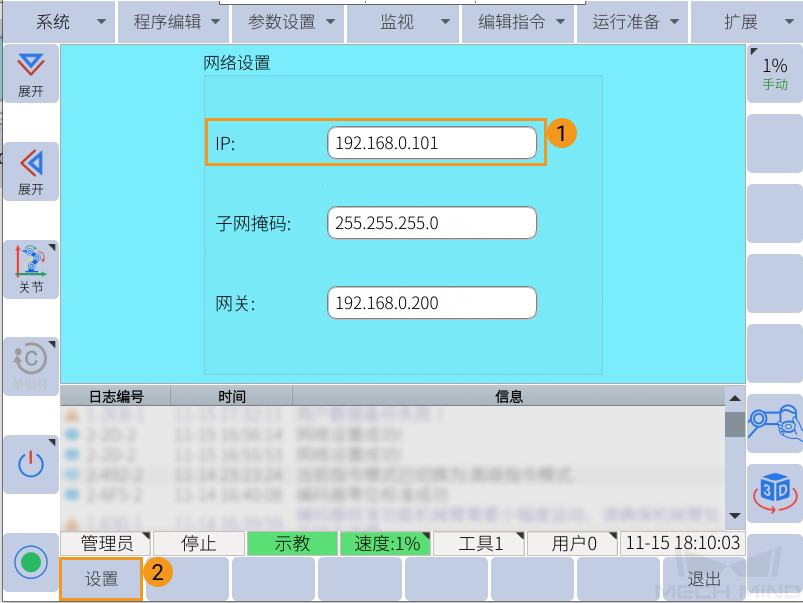
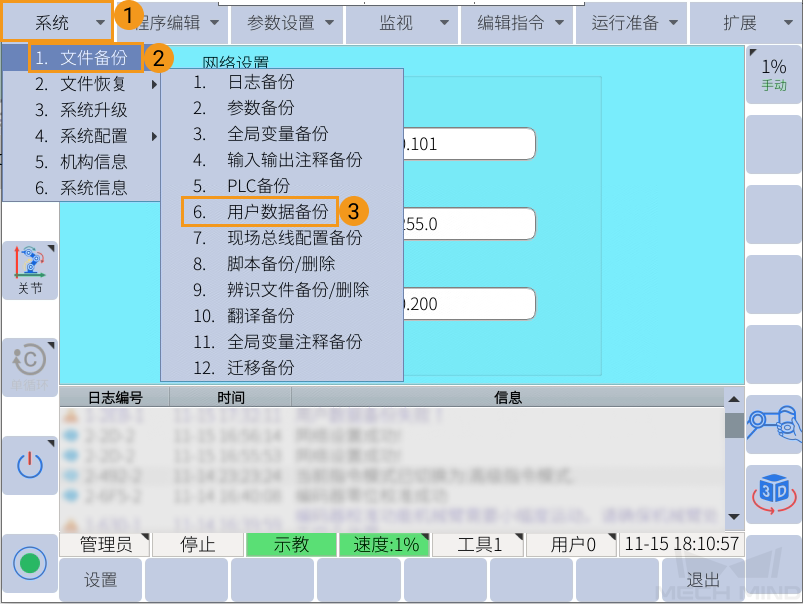
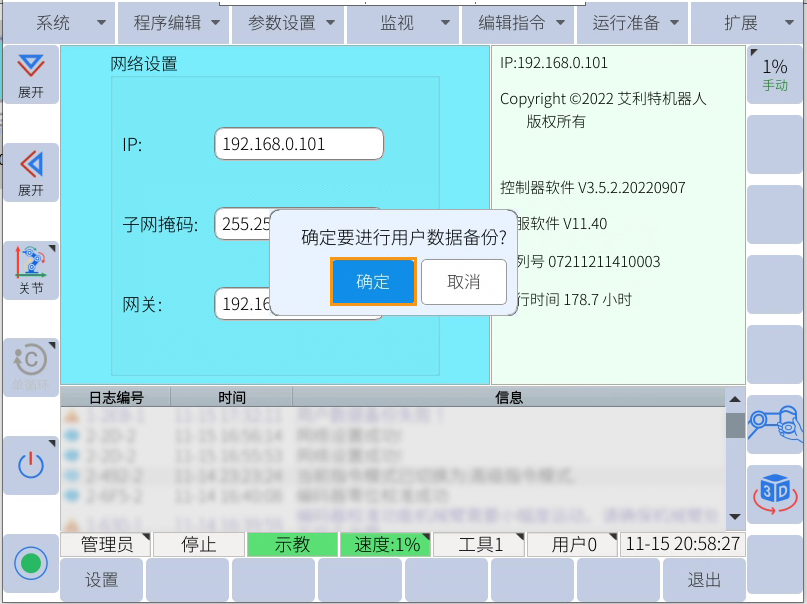
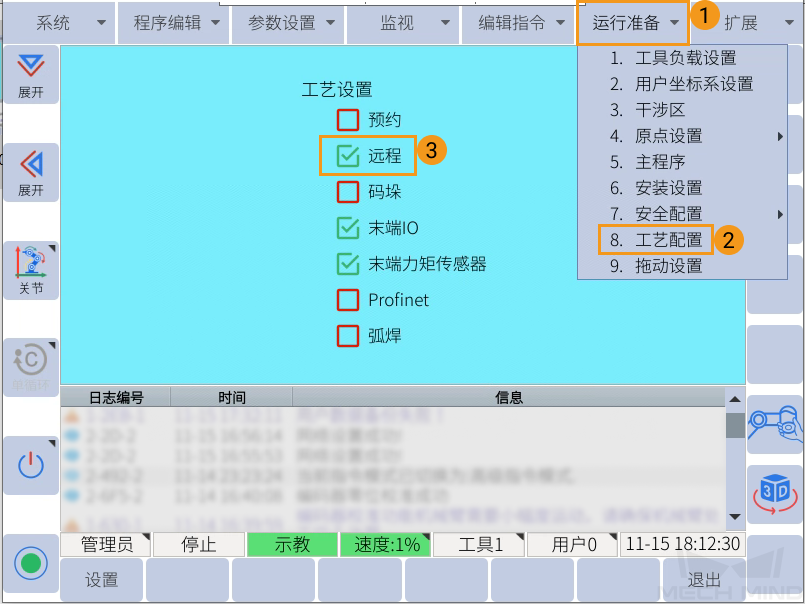
准备工作
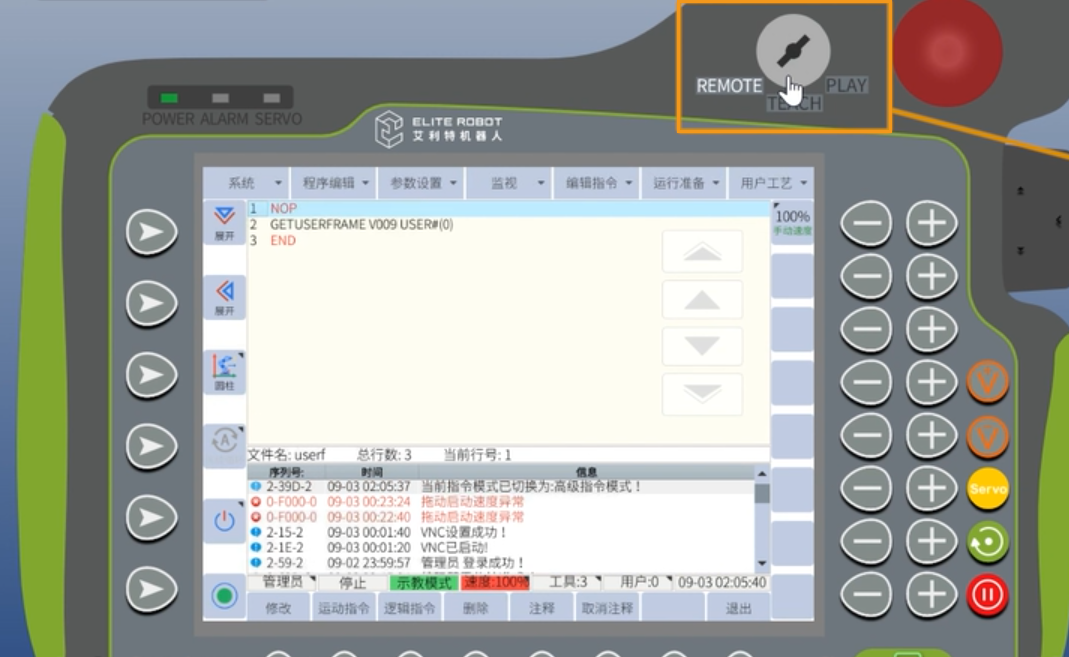
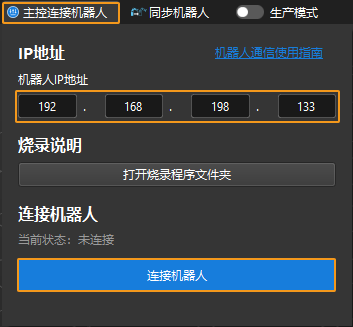
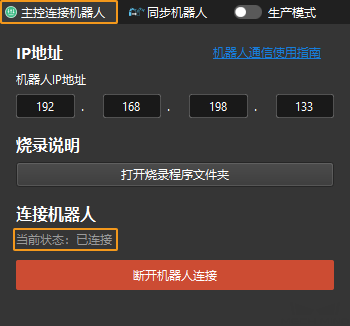
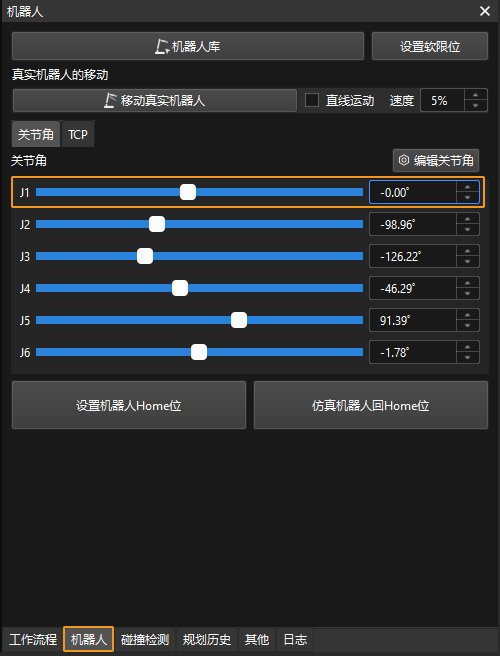
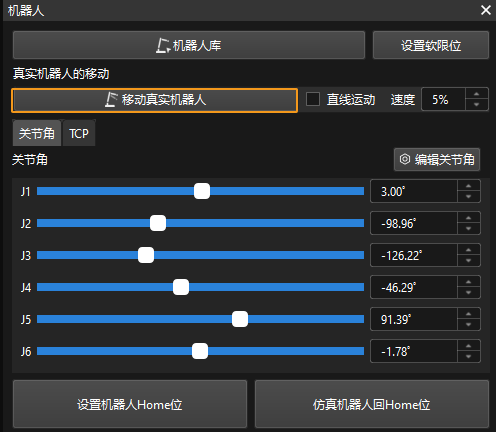
测试主控通信
创建Mech-Viz工程
-
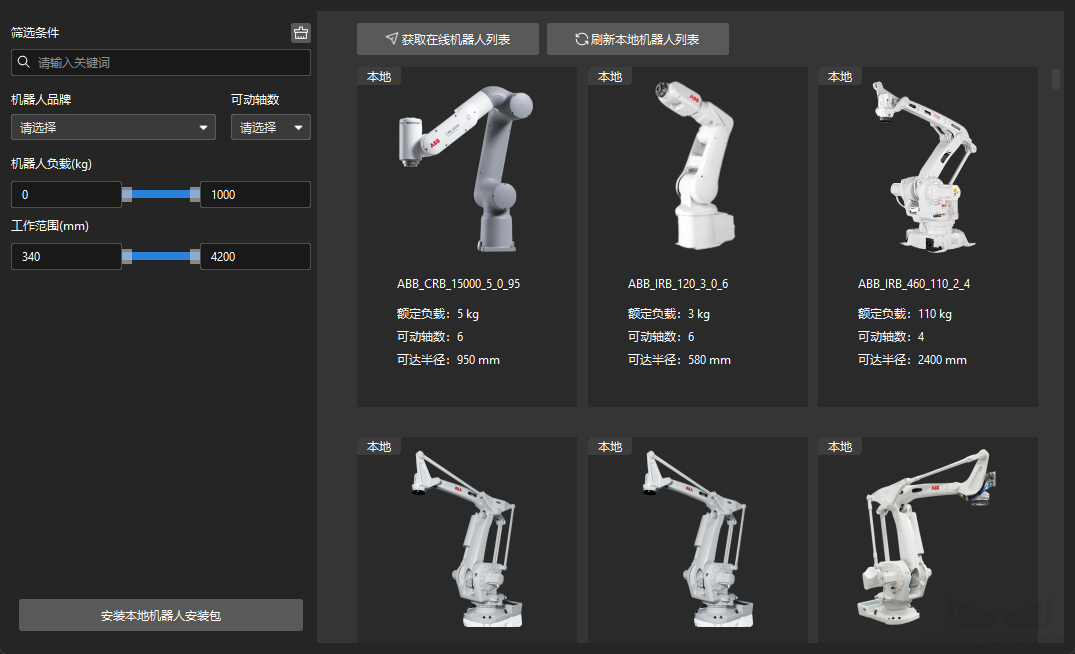
打开Mech-Viz软件,按下键盘上 Ctrl + N(新建工程)。在如下界面中,根据真实机器人的品牌和型号,选择对应的机器人模型。
-
按下键盘上 Ctrl + S,创建或选择文件夹,以保存工程。
-
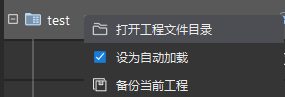
在Mech-Viz软件的左侧窗口中,右键单击工程名称,勾选 设为自动加载。
本节介绍如何主控 Elite EC 系列机器人。
打开Mech-Viz软件,按下键盘上 Ctrl + N(新建工程)。在如下界面中,根据真实机器人的品牌和型号,选择对应的机器人模型。
按下键盘上 Ctrl + S,创建或选择文件夹,以保存工程。
在Mech-Viz软件的左侧窗口中,右键单击工程名称,勾选 设为自动加载。