对于KUKA机器人,标准接口程序如何实现后台运行?
对于KUKA机器人而言,当主任务调用子任务时,主任务属于前台程序;子任务属于后台程序,需要在机器人系统开机后自动运行。下面讲解如何为KUKA机器人创建标准接口后台程序并实现后台运行。
| 在开始前,请确保已完成KUKA标准接口通信配置。 |
创建并运行后台程序
-
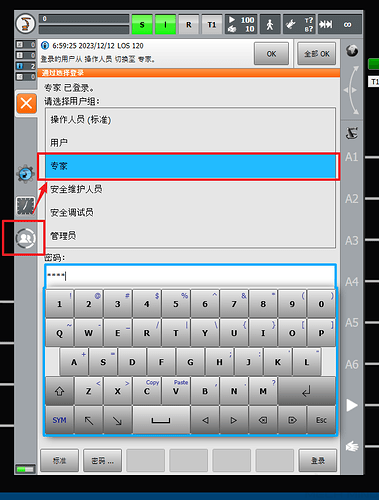
点击用户组图标,将用户组级别切换为专家级别,默认密码为kuka。
-
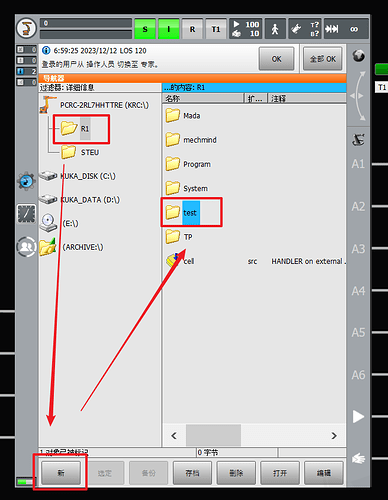
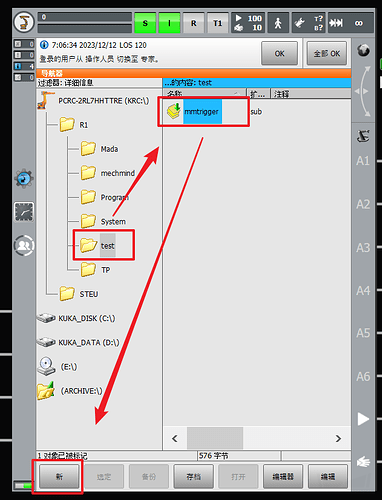
选中R1文件夹,点击左下角新,创建一个新文件夹用于存放程序文件。此处将文件夹命名为test。
-
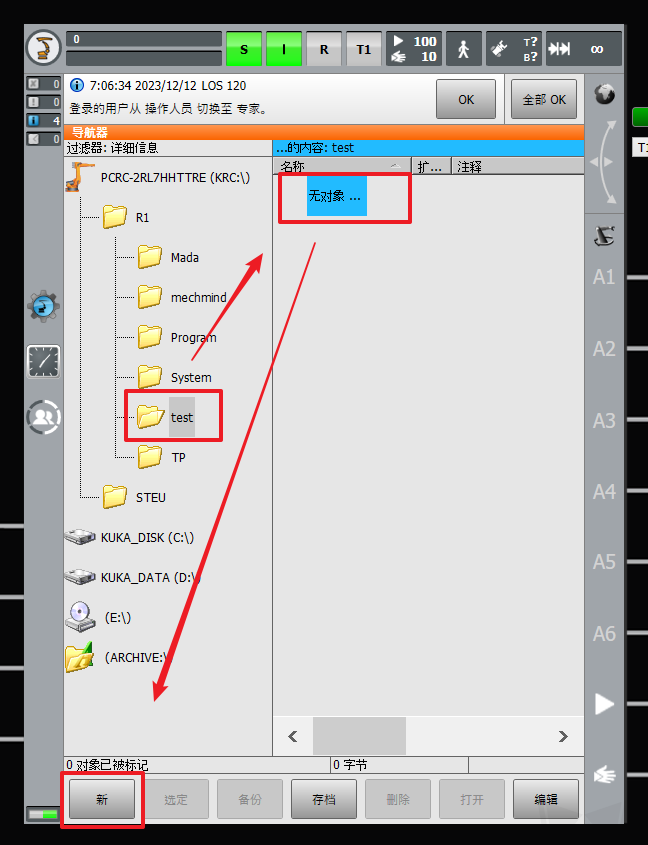
在test文件夹下,选中右侧无对象,再点击左下角新,即可打开选择模板。
-
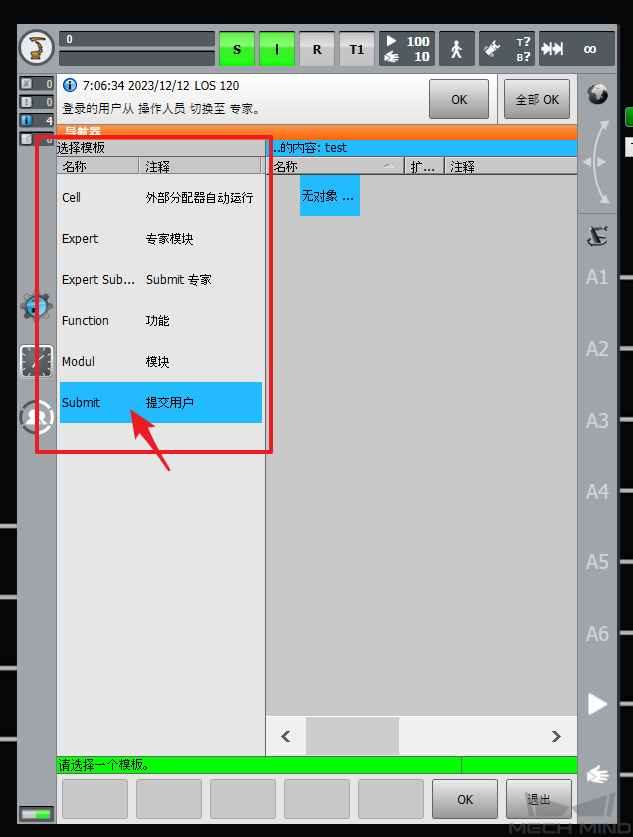
在选择模板中,双击Submit创建一个用于后台运行的机器人Submit程序。
-
输入程序名称,按回车键进行保存。此处将程序命名为mmtrigger。
-
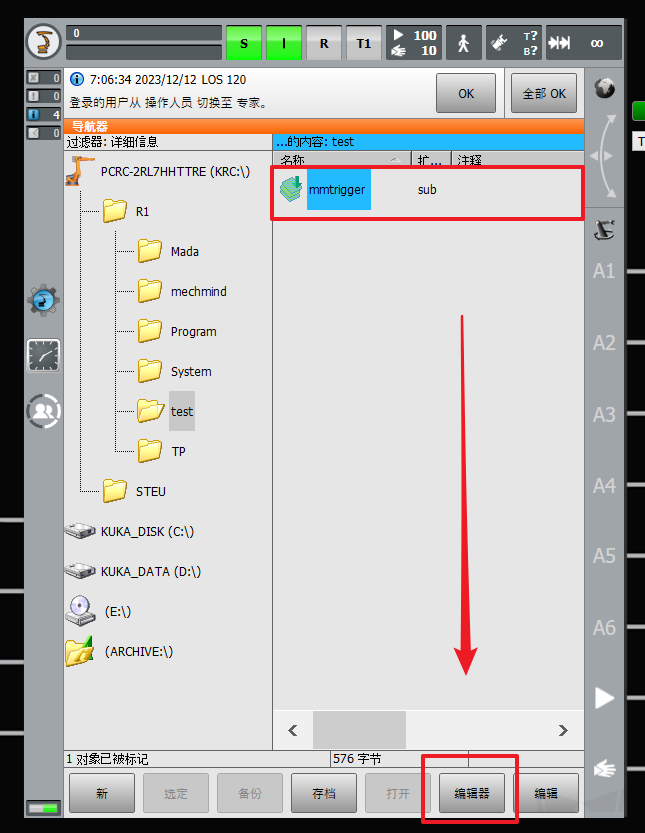
选中新建的mmtrigger程序文件,点击编辑器,即可编写程序。
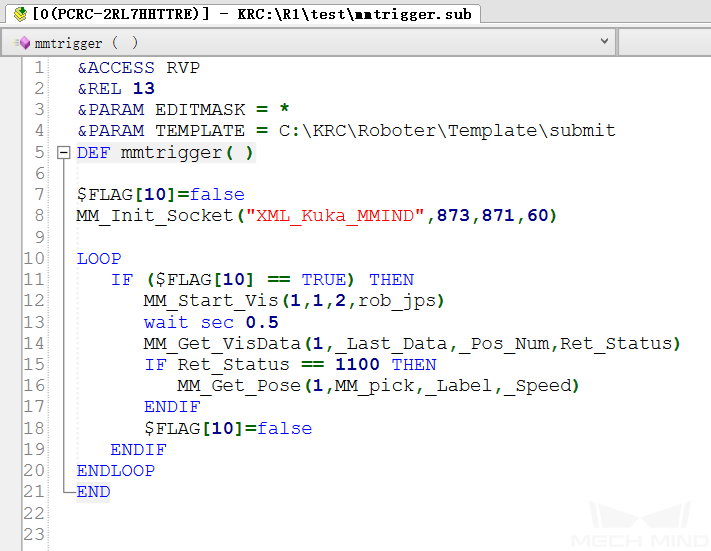
例如,图中示例代码表示触发Mech-Vision工程运行并获取视觉结果。
-
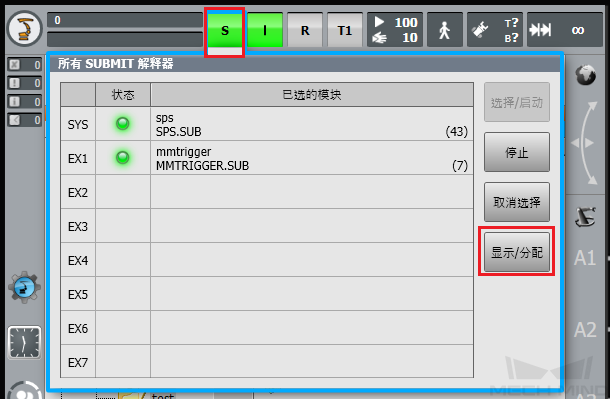
点击图标S,打开SUBMIT解释器,点击显示/分配进入设置界面。
-
在当前的显示和分配中,在EX1一栏中选择mmtrigger程序,点击选择/启动,即可启动后台程序。

-
在冷启动配置中,在EX1一栏中选择mmtrigger程序,勾选自动启动框,即可自动启动后台程序。

创建并运行前台程序
-
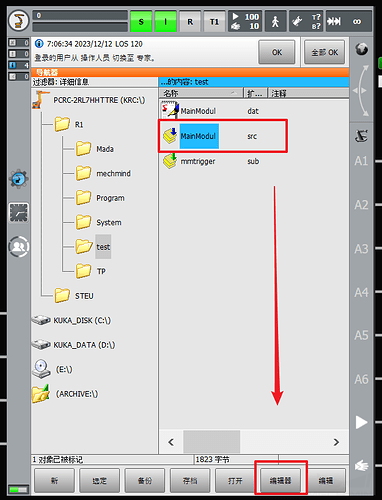
打开test文件夹,选中右侧mmtrigger程序文件,再点击左下角新,即可打开选择模板。
-
在选择模板中,双击Modul,创建一个新的模块程序。此处将程序命名为MainModul。

-
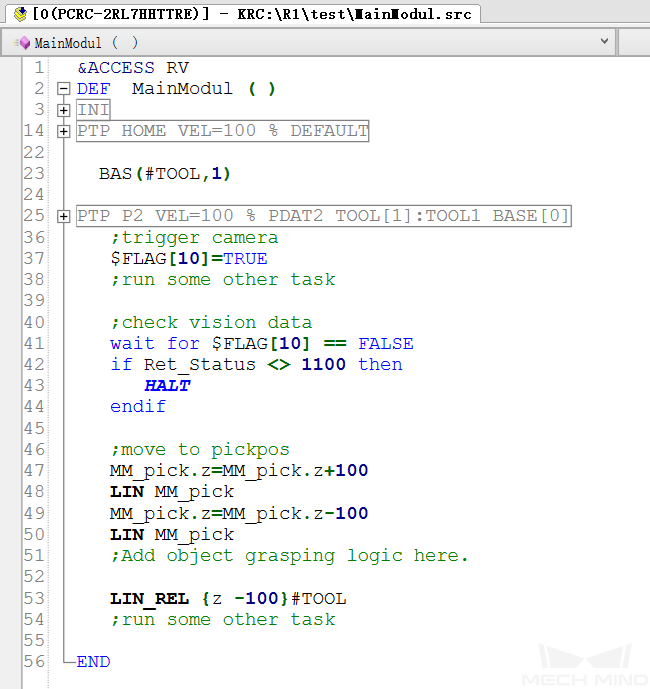
选中新建的MainModul.src程序文件,点击编辑器,即可编写程序。
例如,图中示例代码表示,当$FLAG[10]为TURE时,前台程序调用后台程序。
-
在确定后台程序正常运行后,再运行上述前台程序,具体运行方法可参考运行标定程序。