主控通信
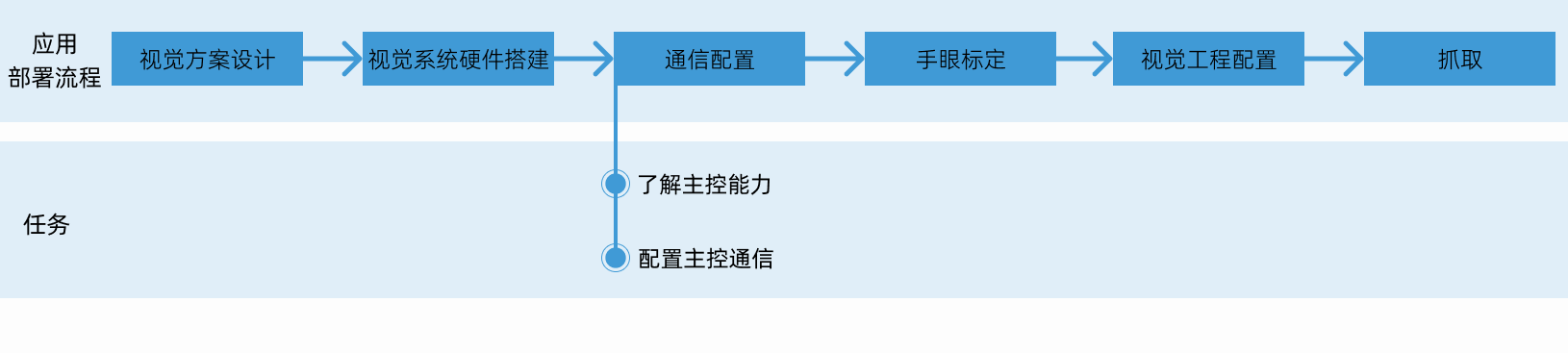
在了解主控通信基本概念后,用户接下来需结合实际项目及所用的机器人,在实际应用部署流程中,完成主控通信相关的任务。
| 本手册主要介绍部署流程中与通信相关的部分。关于部署流程中的其他详细任务,请参考应用部署流程中各小节的介绍。 |
| 任务 | 说明 |
|---|---|
了解主控能力 |
查阅该款机器人的主控能力说明,确保通信、机器人运动、数据收发、设置机器人、数字输入输出等各项能力符合项目需求。 |
配置主控通信 |
确保机器人和视觉系统之间可以正常通信。 |
在了解主控通信基本概念后,用户接下来需结合实际项目及所用的机器人,在实际应用部署流程中,完成主控通信相关的任务。
| 本手册主要介绍部署流程中与通信相关的部分。关于部署流程中的其他详细任务,请参考应用部署流程中各小节的介绍。 |
| 任务 | 说明 |
|---|---|
了解主控能力 |
查阅该款机器人的主控能力说明,确保通信、机器人运动、数据收发、设置机器人、数字输入输出等各项能力符合项目需求。 |
配置主控通信 |
确保机器人和视觉系统之间可以正常通信。 |