JAKA自动标定
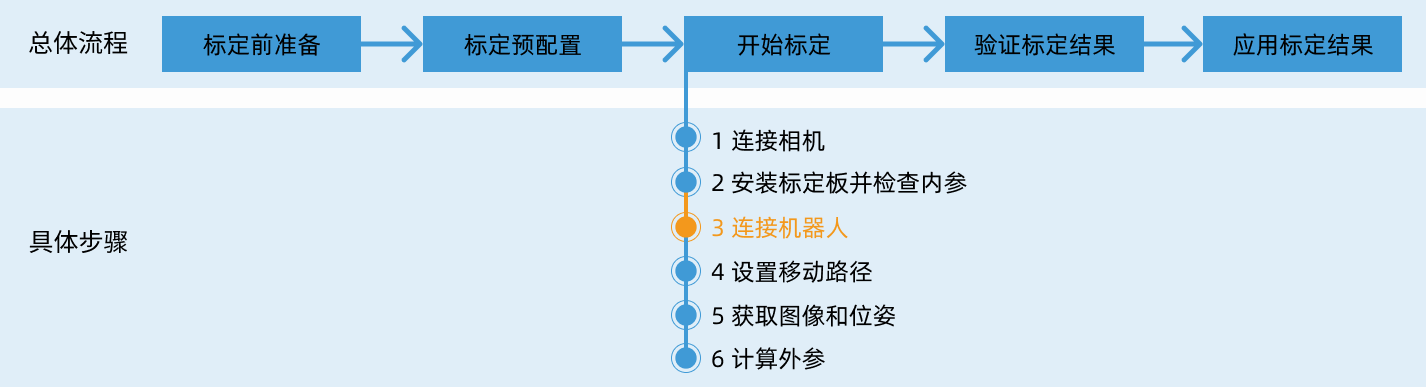
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
-
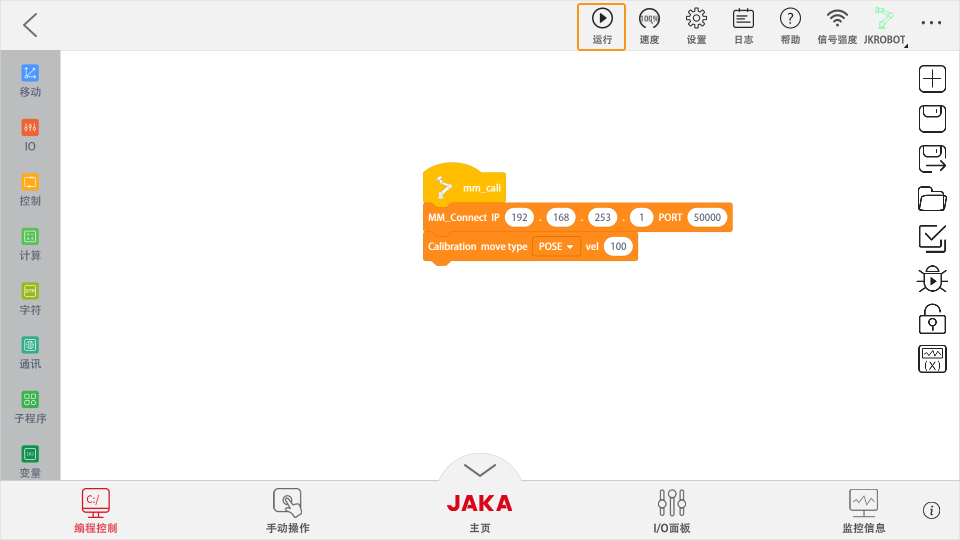
在 编程控制 界面,拖拽如下图所示的两条指令,或者打开 烧录 的 mm_cali 程序。
在MM_Connect指令中,IP参数值需设置为工控机IP地址,PORT参数值需要与Mech-Vision中设置的主机端口号保持一致。

-
单击左上角 运行 。
-
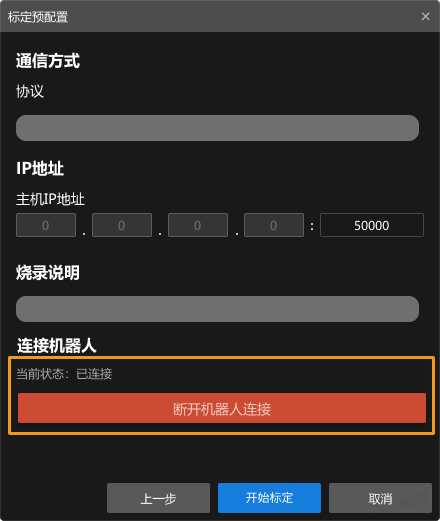
观察Mech-Vision中标定窗口,在连接机器人区域显示“已连接”状态信息后,且按钮由等待机器人连接中…变为断开机器人连接,单击底部栏中的下一步按钮。
-
请分别参考如下链接,接着执行开始标定中的第四步(设置移动路径)以及后续流程。