寄存器使用说明
PLC 使用的数据类型为 MM_Interface 结构体,该结构体需要占用 1528 个 D 寄存器。该结构体变量的起始地址需要与 Mech-Vision 中配置的起始地址相同。当 PLC 和 Mech-Vision 使用的起始地址都为 10000 时,各变量的寄存器地址如下图所示。
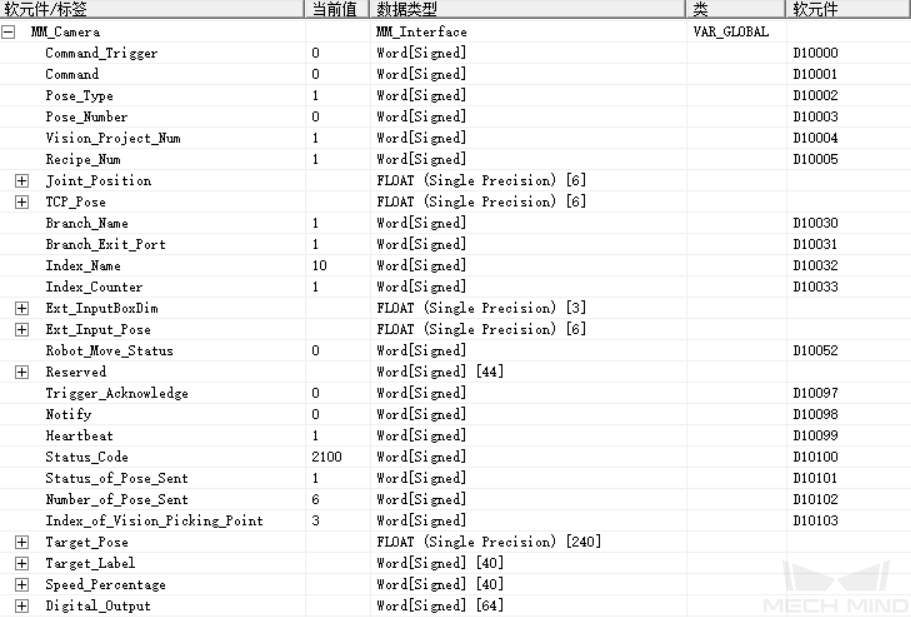
下表为各变量的寄存器相对于起始地址的偏移量及说明。
| 寄存器地址偏移量 | 名称 | 数据类型 | 说明 |
|---|---|---|---|
0 |
Command_Trigger |
Word[有符号] |
触发信号 |
1 |
Command |
Word[有符号] |
指令码 |
2 |
Pose_Type |
Word[有符号] |
位姿类型 |
3 |
Pose_Number |
Word[有符号] |
预期视觉点或路径点数量 |
4 |
Vision_Project_Num |
Word[有符号] |
Mech-Vision工程编号 |
5 |
Recipe_Num |
Word[有符号] |
参数配方编号 |
6 |
Joint_Position |
Float[单精度][6] |
关节角数据 |
18 |
TCP_Pose |
Float[单精度][6] |
法兰位姿数据 |
30 |
Branch_Name |
Word[有符号] |
消息分支的步骤编号 |
31 |
Branch_Exit_Port |
Word[有符号] |
“消息分支”步骤的出口号 |
32 |
Index_Name |
Word[有符号] |
索引类步骤的步骤编号 |
33 |
Index_Counter |
Word[有符号] |
索引类步骤的当前索引值 |
34 |
Ext_InputBoxDim |
Float[单精度][3] |
传入Mech-Vision工程的物体尺寸 |
40 |
Ext_Input_Pose |
Float[单精度][6] |
传入Mech-Viz工程的外部机器人工具位姿 |
52 |
Robot_Move_Status |
Word[有符号] |
机器人移动状态 |
53 |
Depalletize_Tool_Section_Count |
Word[有符号] |
吸盘分区数量 |
54 |
Reserved |
Word[有符号][43] |
预留 |
97 |
Trigger_Acknowledge |
Word[有符号] |
触发确认 |
98 |
Notify |
Word[有符号] |
“通知”步骤的消息 |
99 |
Heartbeat |
Word[有符号] |
心跳值 |
100 |
Status_Code |
Word[有符号] |
状态码 |
101 |
Status_of_Pose_Sent |
Word[有符号] |
是否已获取所有视觉点或路径点 |
102 |
Number_of_Pose_Sent |
Word[有符号] |
视觉点或路径点的数量 |
103 |
Index_of_Vision_Picking_Point |
Word[有符号] |
“视觉移动”在路径中的位置 |
104 |
Target_Pose |
Float[单精度][240] |
此次获取的所有视觉点或路径点的位姿 |
584 |
Target_Label |
Word[有符号][40] |
此次获取的所有视觉点或路径点的标签 |
624 |
Target_Tool_ID |
Word[有符号][40] |
此次获取的所有路径点的末端工具编号 |
664 |
Digital_Output |
Word[有符号][64] |
视觉系统返回的64个DO信号 |
728 |
Custom_Vision_Output |
Float[单精度][400] |
此次获取的所有视觉点的自定义数据 |