HYUNDAI自动标定
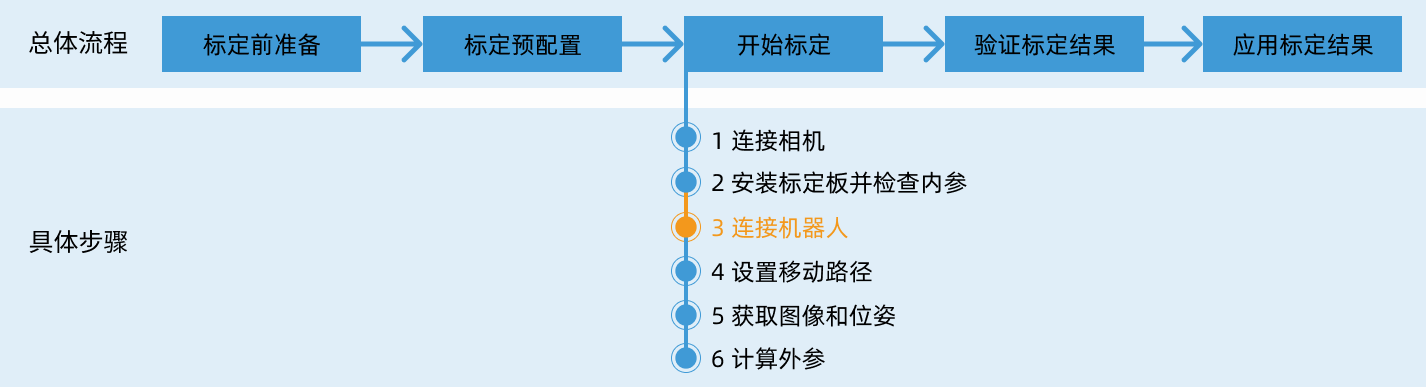
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
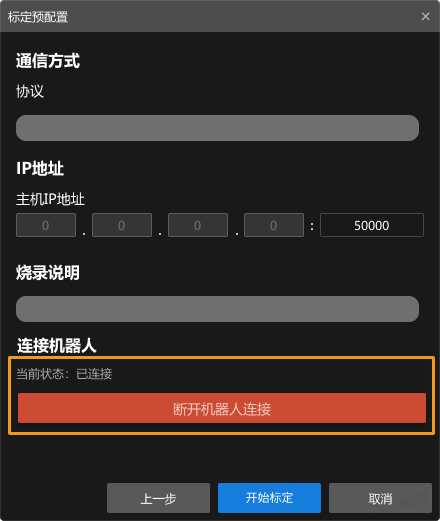
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
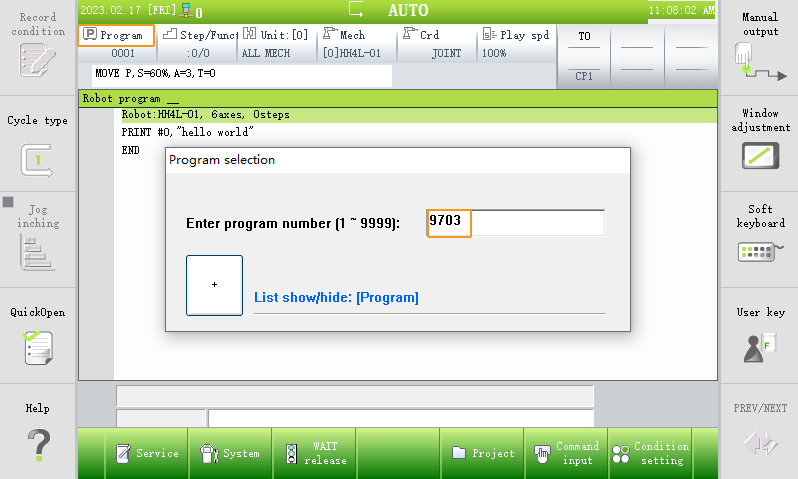
1. 打开标定程序
-
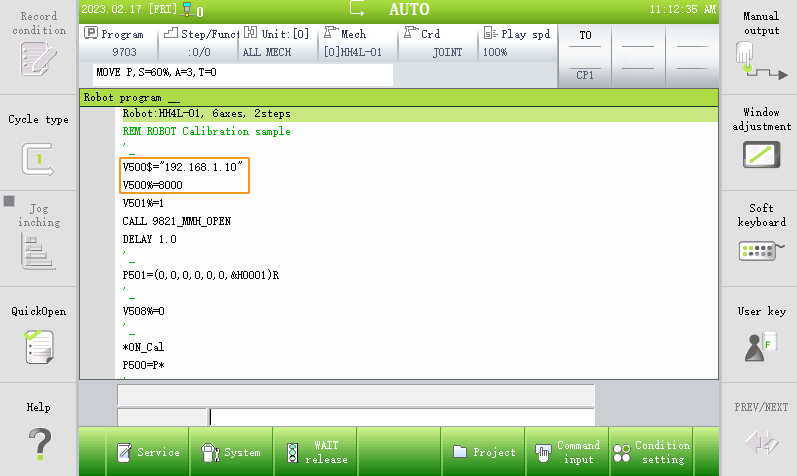
在示教器界面,点击左上角 Program 区域,在输入框内输入 9703,打开 9703 标定程序。
-
将 V500$ 的值修改为工控机 IP,将 V500% 的值修改为 Mech-Vision 中设置的端口号。