JAKA标准接口通信配置
本节介绍如何配置 JAKA 标准接口通信。
检查控制器软件版本
在烧录标准接口程序前,用户需检查控制器软件版本是否为 1.7。
-
若机器人控制器软件版本低于 1.7,则可选择升级至 1.7 版本。本文以下操作涉及节卡 addon 插件程序,因此机器人控制器软件版本需为 1.7。
1.7 版本是适配时所用的版本。对于高于 1.7 的版本,用户可参考本文尝试操作,若遇到问题,请联系梅卡曼德技术支持。 -
若用户不方便升级控制器软件版本,则使用 节卡程序实现的标准接口程序 。此时用户无需安装节卡 addon 插件程序,程序对控制器软件版本无要求。
建立网络连接
设置 IP 地址
-
在工控机上,访问 节卡官网 以下载JAKA App软件,请确保JAKA App软件版本和控制器版本一致。
-
若使用示教器操作,则无需下载JAKA App,请忽略此步操作,参照本文后续操作即可。
-
本文以JAKA App V1.7.0版本为例进行演示,其他版本界面或功能可能略有差异,但操作逻辑基本一致。
-
-
运行 JAKA APP,点击主界面右上角的 未连接 进入 连接机器人 界面,单击
 可进入输入密码界面。
可进入输入密码界面。
-
输入管理员密码(默认密码为 jakazuadmin ),然后单击 连接机器人 。

-
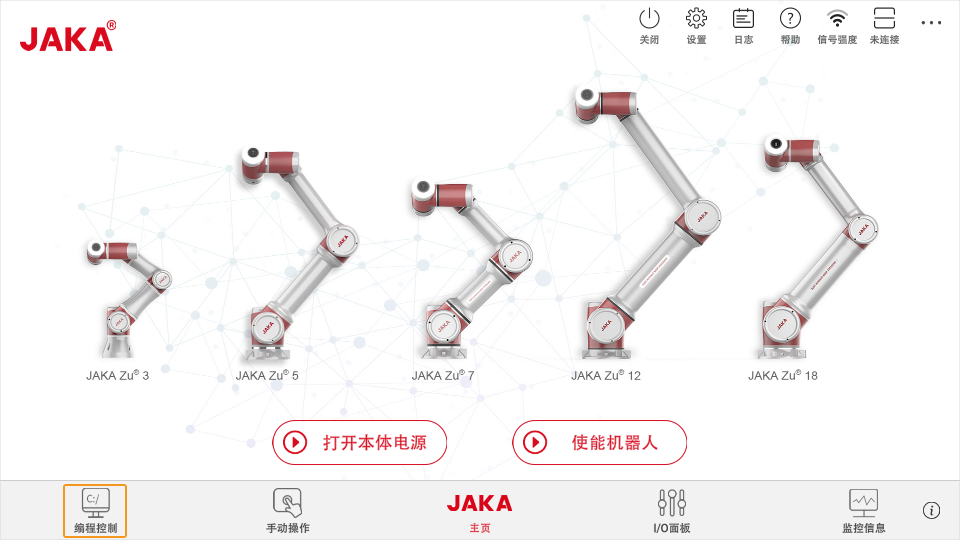
出现如下界面,表示机器人连接成功。

-
单击 打开本体电源,然后单击 使能机器人 ,机器人成功上电。
在机器人上电后,弹出提示信息窗口,请务必填写末端负载值,否则机器人启动后的一瞬间上下浮动较大,很容易造成危险。 
-
单击主界面右上角的 设置
 ,依次单击,即可设置 IP 地址。JAKA APP 需与 JAKA 机器人在同一网段。
,依次单击,即可设置 IP 地址。JAKA APP 需与 JAKA 机器人在同一网段。
-
在工控机上,设置工控机IP地址。
工控机IP地址需与机器人IP地址位于同一网段。
设置“机器人通信配置”
-
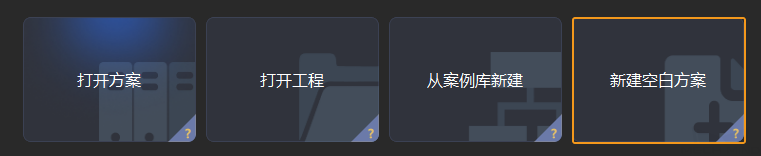
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
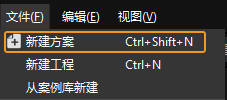
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
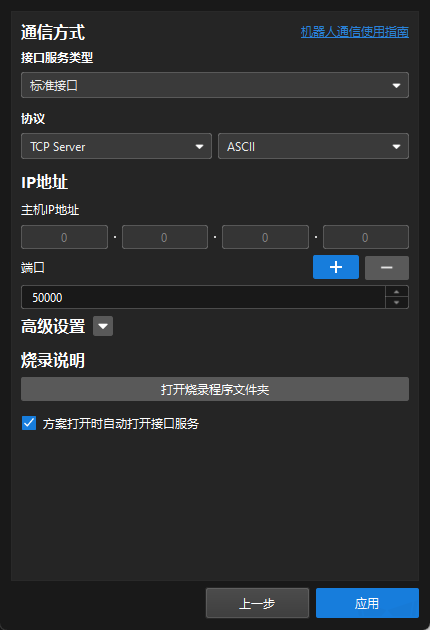
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 ASCII。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

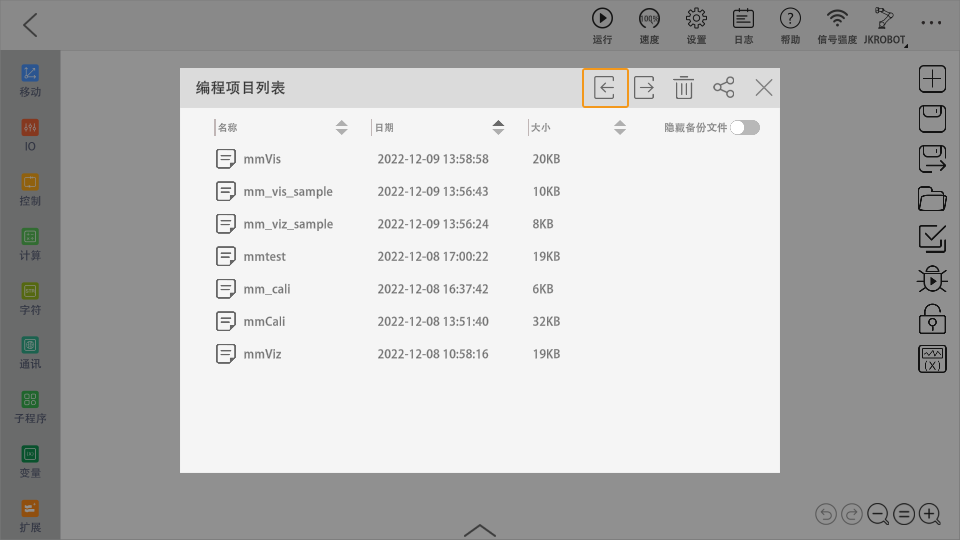
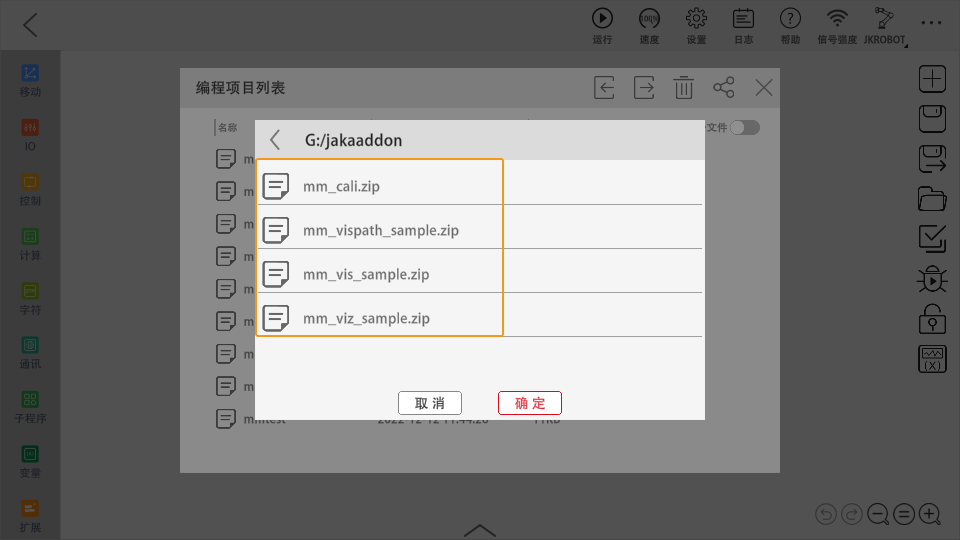
烧录文件至机器人中


创建环境变量
在运行程序前,用户需要先创建两个系统变量,否则运行程序将会报错。
-
返回 JAKA 主页界面,单击右上角 设置 。

-
依次单击 程序设置 → 系统变量 ,然后单击右上角的 + ,创建如图所示的两个变量(MM_CMD 和 MM_STATUS),初始值为 0。

测试机器人连接状态
-
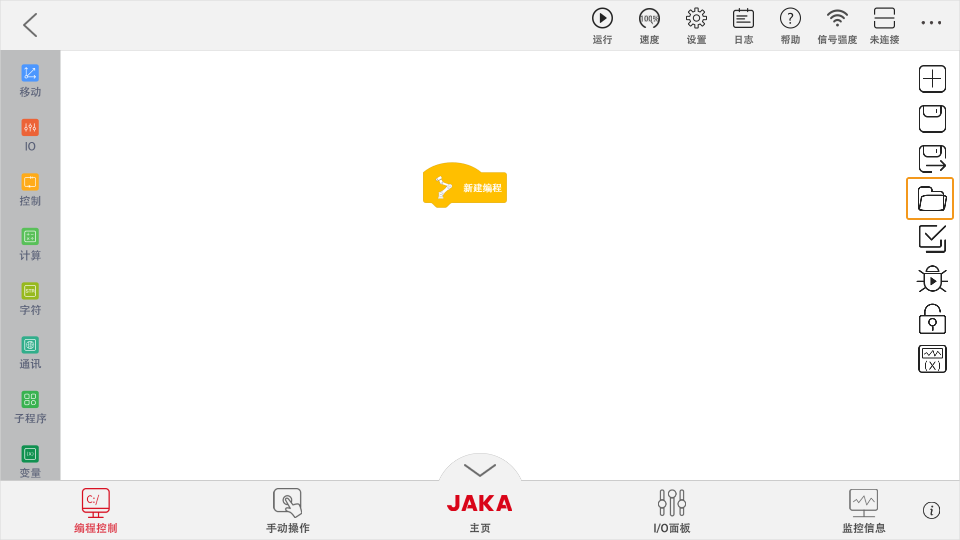
返回 JAKA 主页界面,单击左下角 编程控制 。
-
单击右侧 + 以新建程序。
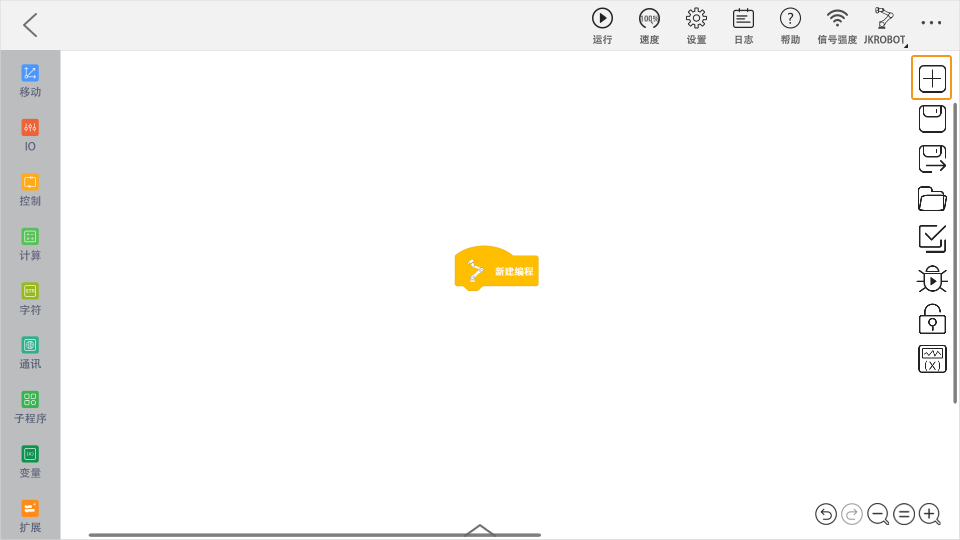
-
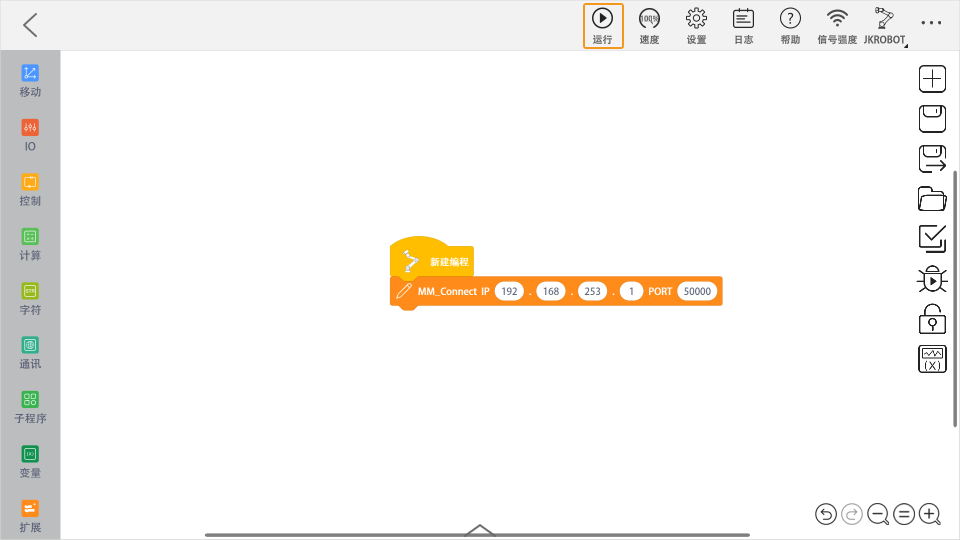
单击左侧底部 扩展 ,将 MM_Connect 拖入 新建编程 下,并设置工控机的 IP 地址和端口号。
工控机 IP 需要与机器人 IP 位于同一网段内。 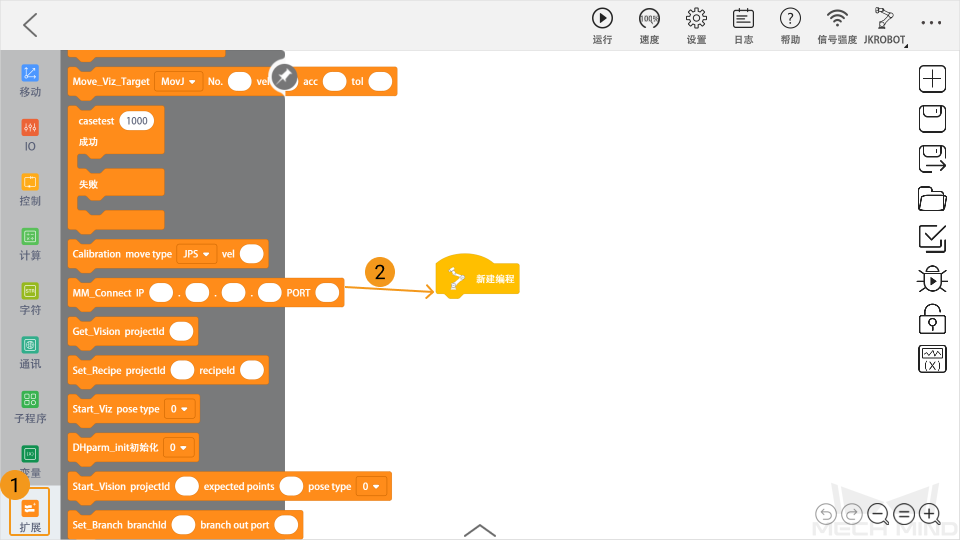
-
单击左上角 运行 。
-
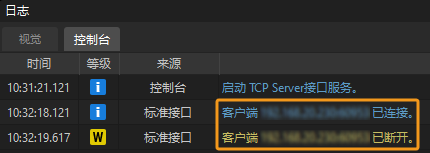
若连接成功,则 Mech-Vision 日志窗口的 控制台 标签页下会出现相关提示。
通信测试成功后,为保证后续任务的顺利进行,请继续下一小节设置 DH 参数。
设置 DH 参数
由于每一台协作机器人的实际 DH 参数与理论 DH 参数存在差异,因此,Mech-Viz中虚拟机器人在同步关节角后,会与实际法兰位姿会存在偏差。对于精度较高的场景,请参考下述设置 DH 参数方法,以减少误差。
-
打开 Mech-Viz 软件,新建一个空白工程,机器人品牌 选择所用的 JAKA 机器人。
-
在 JAKA 主页界面,点击 10 次左上角 logo 图标,填写密码(默认为 JAKAAMAZING),出现如下界面。
-
在 Mech-Viz 软件的左侧窗口中,右键单击机器人名称,选择 打开机器人文件目录,然后打开
xxxx_algo.json文件。 -
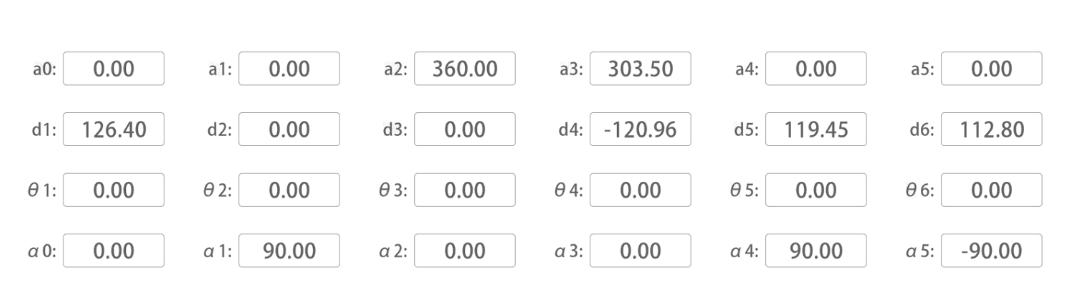
将上图中的 [d1, a2, a3, d4, d5, d6] 值分别填入
xxxx_algo.json文件中 dh 字段值,然后关闭并保存xxxx_algo.json文件。 -
在 Mech-Viz 软件的左侧窗口中,右键单击机器人名称,选择 重新加载机器人。
由于无法调整 xxxx_algo.json文件中的 shoulder_offset 和 elbow_offset (肩部偏移和肘部偏移)值,所以机器人运动还是会存在一定误差。