JAKA(节卡)标准接口通信配置
本节介绍如何配置 JAKA 标准接口通信。
检查控制器软件版本
在烧录标准接口程序前,用户需检查控制器软件版本是否为 1.7。
-
若机器人控制器软件版本低于 1.7,则可选择升级至 1.7 版本。本文以下操作涉及节卡 addon 插件程序,因此机器人控制器软件版本需为 1.7。
-
若用户不方便升级控制器软件版本,则使用 节卡程序实现的标准接口程序 。此时用户无需安装节卡 addon 插件程序,程序对控制器软件版本无要求。
| 下载 JAKA 1.7 控制器软件(文件名为 1.7.0.32.zip)。解压后,controller 文件夹为控制器软件,APP 文件夹为 JAKA Zu APP 软件。 |
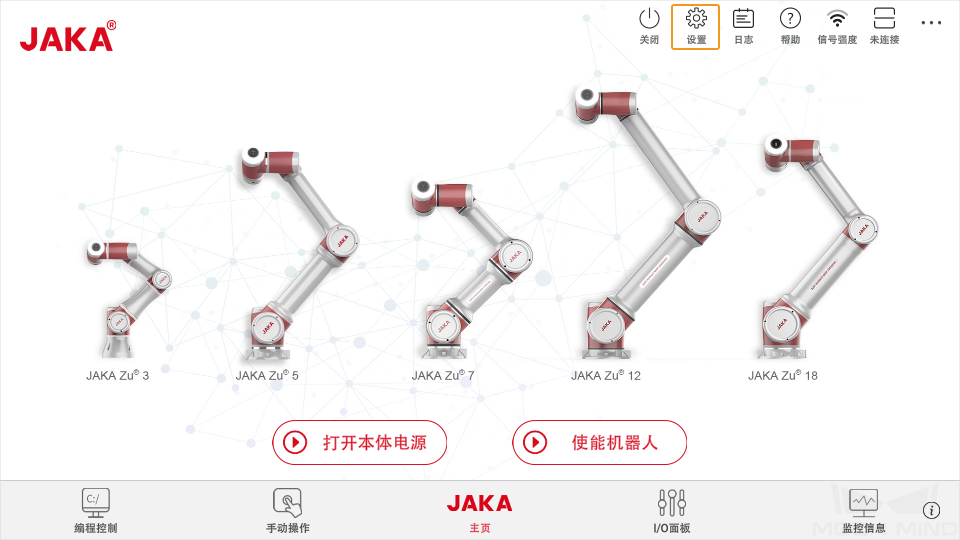
JAKA Zu APP 连接机器人
JAKA Zu APP 连接机器人操作可参考 《主控 JAKA 机器人》 中的“建立网络连接”部分。
| JAKA Zu APP 需使用 1.7 版本,软件包位于 1.7.0.32.zip 文件解压后的 APP 目录下。 |
设置 Mech-Vision 中“机器人与通信配置”
-
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 JAKA 机器人型号,单击 下一步 。
-
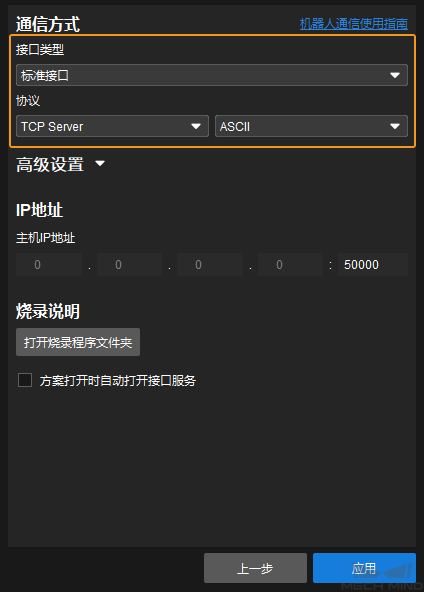
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 ASCII ,最后单击 应用 。
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人中
烧录 addon 插件
-
在 JAKA Zu APP 连接机器人后,单击右上角 设置 。

-
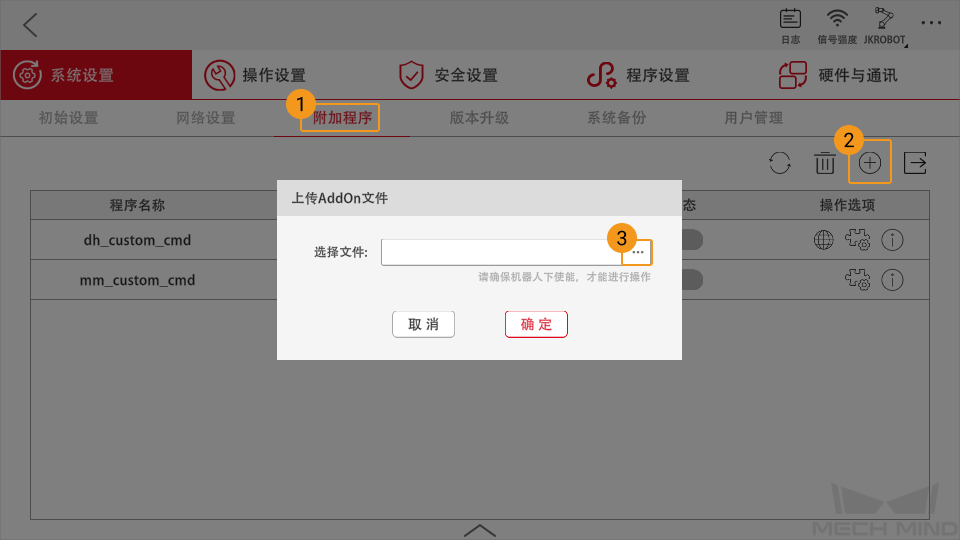
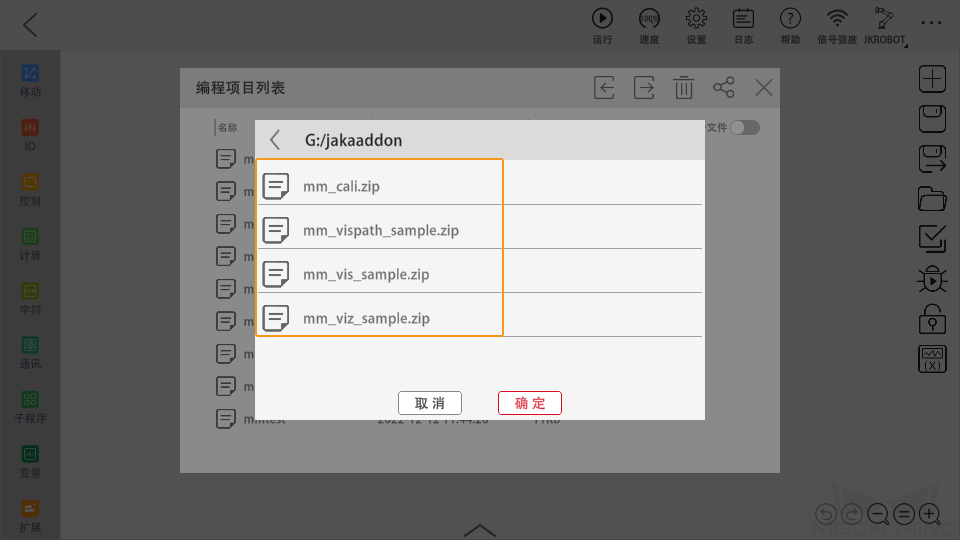
依次单击 附加程序 → + → ··· 。
-
选择 mm_custom_cmd.tar.gz 文件,单击 确定 ,mm_custom_cmd 程序信息将出现在列表中。
在梅卡曼德系统软件的安装目录 Mech-Center\Robot_Interface\Robot_Plugin\JAKA_Addon文件夹下,将 mm_custom_cmd.tar.gz 文件复制至 JAKA Zu APP 所在的机器。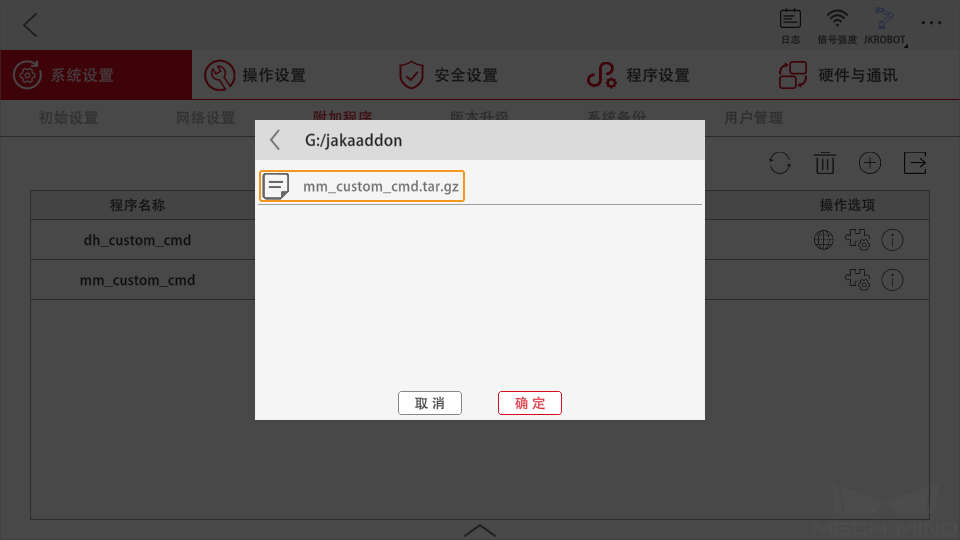
-
单击 mm_custom_cmd 程序的启动按钮,使其处于启动状态。

-
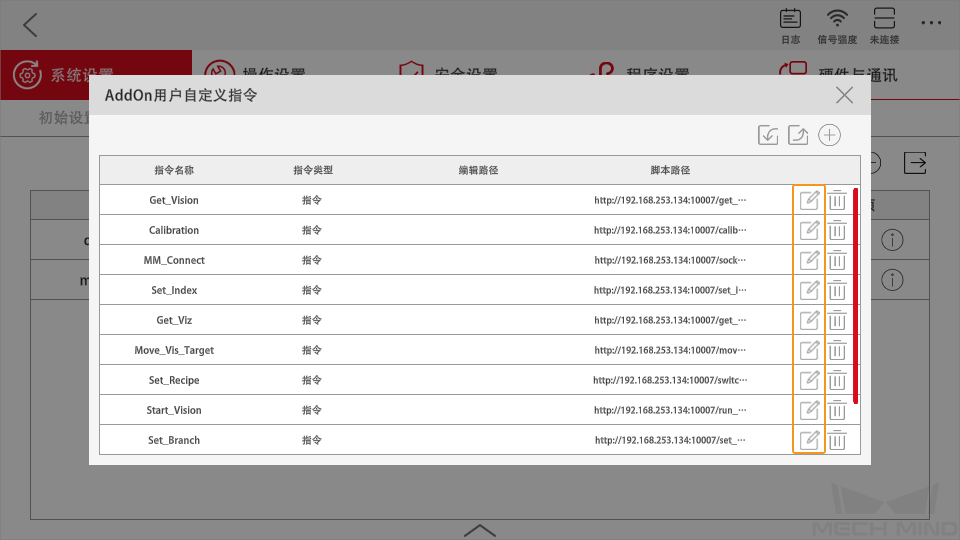
单击指令详情按钮,出现指令详情列表。

-
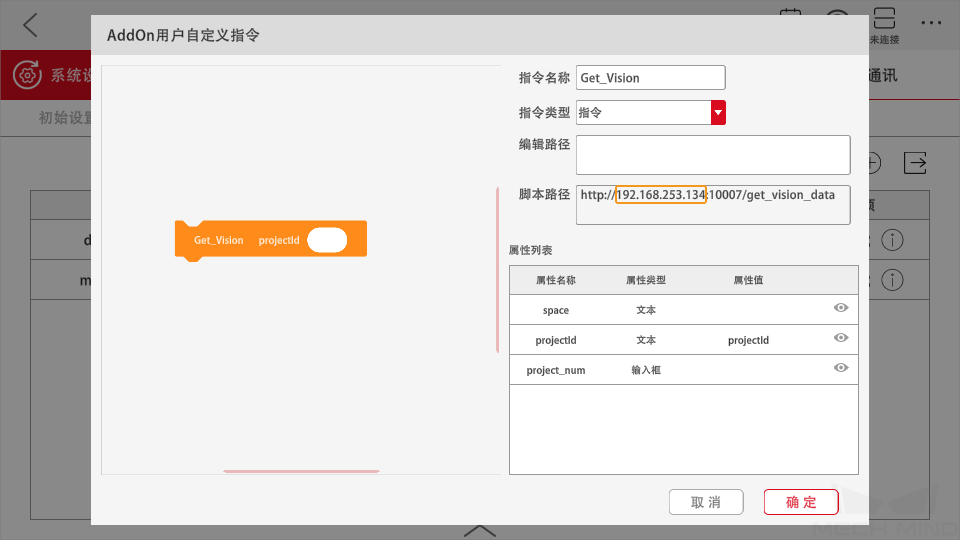
依次点击每条指令的编辑按钮,将脚本路径中 IP 地址修改为机器人 IP 地址,然后单击 确定 。
创建环境变量
在运行程序前,用户需要先创建两个系统变量,否则运行程序将会报错。
-
返回 JAKA 主页界面,单击右上角 设置 。
-
依次单击 程序设置 → 系统变量 ,然后单击右上角的 + ,创建如图所示的两个变量(MM_CMD 和 MM_STATUS),初始值为 0。

测试机器人连接状态
-
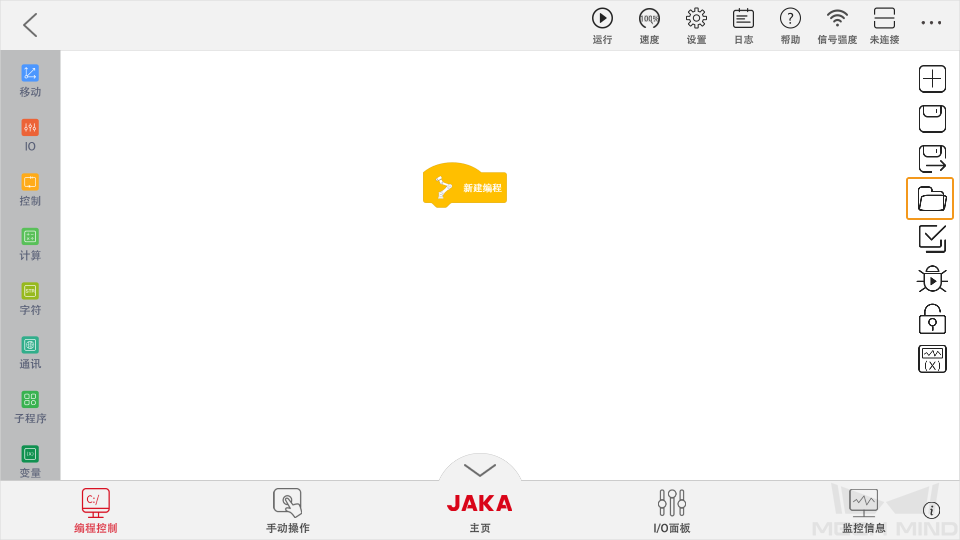
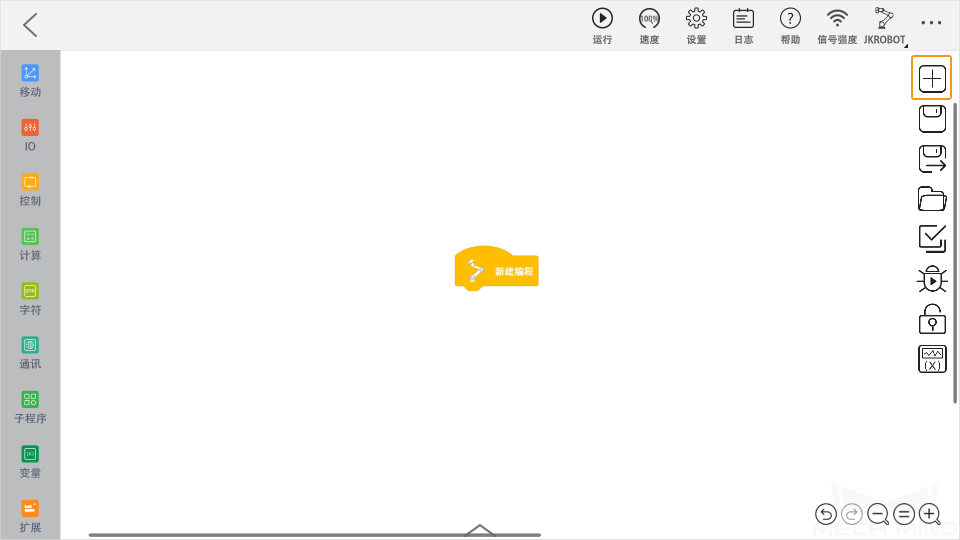
返回 JAKA 主页界面,单击左下角 编程控制 。

-
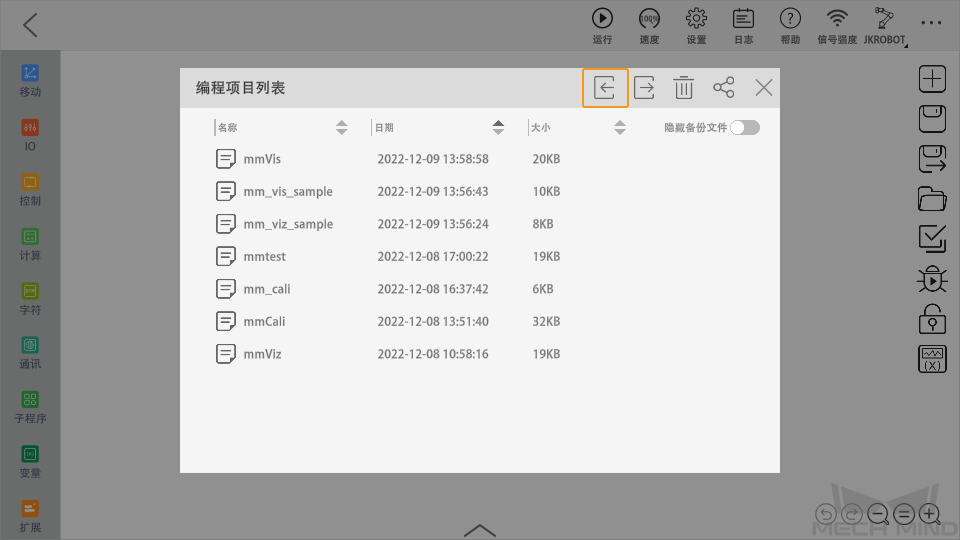
单击右侧 + 以新建程序。
-
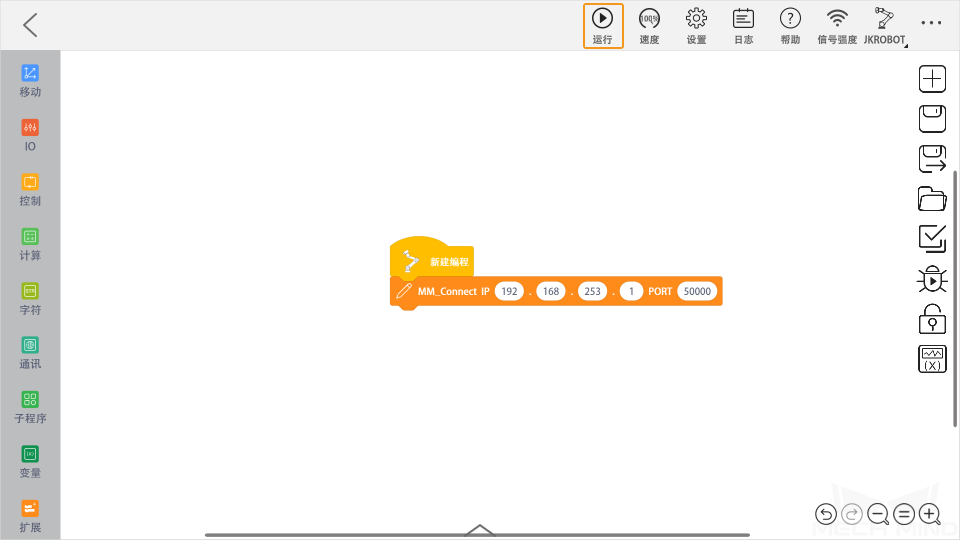
单击左侧底部 扩展 ,将 MM_Connect 拖入 新建编程 下,并设置工控机的 IP 地址和端口号。
工控机 IP 需要与机器人 IP 位于同一网段内。 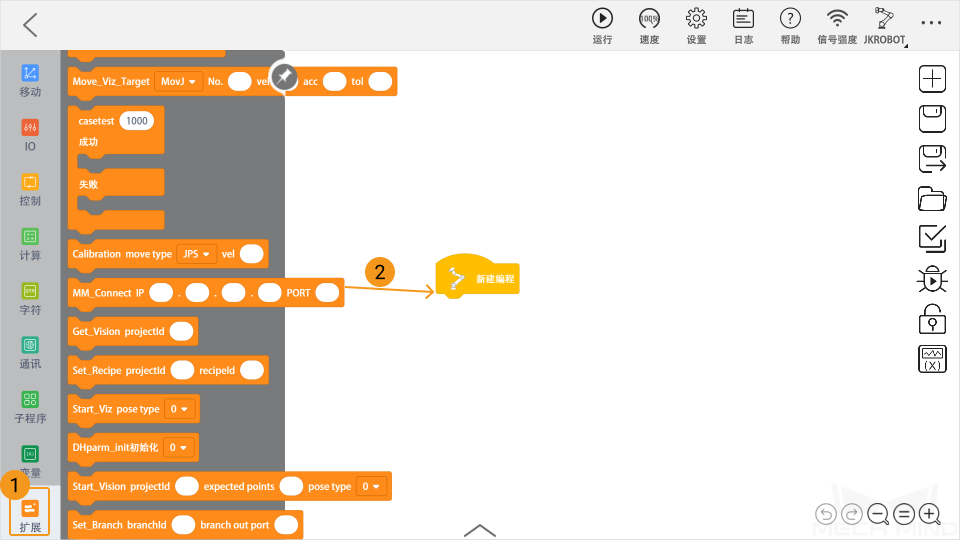
-
单击左上角 运行 。
-
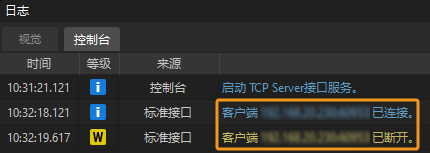
若连接成功,则 Mech-Vision 日志窗口的 Console 标签页下会出现相关提示。