样例程序8:MM_S8_Viz_Subtask
程序简介
功能说明 |
本样例由两个程序组成,其中子程序(后台程序)负责触发Mech-Viz工程运行并获取规划路径;主程序(前台程序)负责根据规划路径移动机器人,且在机器人放置时触发子程序运行,从而提前规划下一轮路径,以缩短节拍。
|
||
文件路径 |
子程序:Mech-Vision和Mech-Viz软件安装目录下 主程序:Mech-Vision和Mech-Viz软件安装目录下
|
||
所需工程 |
Mech-Vision工程和Mech-Viz工程 |
||
使用前提 |
|
|
程序解读
以下为子程序的代码及相关解释说明。
| 在子程序中,触发Mech-Viz工程运行并获取规划路径的代码,与MM_S2_Viz_Basic样例中类似。因此,下文不再重复解释与MM_S2_Viz_Basic样例相同部分的代码(详情请参考MM_S2_Viz_Basic样例说明)。 |
MODULE MM_S8_Sub
!----------------------------------------------------------
! FUNCTION: run Mech-Viz project and get planned path
! in subtask (run together with MM_S8_Viz_Subtask)
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define variables
PERS num pose_num_a:=5;
PERS num vis_pose_num_a:=3;
PERS num toolid_a{5}:=[0,0,0,0,0];
PERS num label_a{5}:=[0,0,0,0,0];
PERS num status_a:=2100;
PERS bool flag_vis_a:=FALSE;
CONST jointtarget snap_jps_a:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PERS jointtarget jps_a{5}:=
[
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
PROC main()
flag_vis_a:=FALSE;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
WHILE TRUE DO
IF flag_vis_a=TRUE THEN
MM_Open_Socket;
!trigger Mech-Viz project
MM_Start_Viz 2,snap_jps_a;
!get planned path, 1st argument (1) means getting pose in JPs
MM_Get_VizData 1, pose_num_a, vis_pose_num_a, status_a;
!check whether planned path has been got from Mech-Viz successfully
IF status_a=2100 THEN
!save waypoints of the planned path to local variables one by one
MM_Get_Jps 1,jps_a{1},label_a{1},toolid_a{1};
MM_Get_JPS 2,jps_a{2},label_a{2},toolid_a{2};
MM_Get_JPS 3,jps_a{3},label_a{3},toolid_a{3};
ENDIF
MM_Close_Socket;
flag_vis_a:=FALSE;
ENDIF
ENDWHILE
ENDPROC
ENDMODULE上述代码表示,子程序在运行时,首先将flag_vis_a设置为FALSE,并初始化通信参数,然后通过WHILE循环持续监听flag_vis_a值。
-
当flag_vis_a为TRUE时,子程序发触发Mech-Viz工程运行并获取规划路径,然后将flag_vis_a设置为FALSE。
-
当flag_vis_a为FALSE时,子程序持续判断flag_vis_a的值。
以下为主程序的代码及相关解释说明。
| 在主程序中,根据规划路径进行抓取与放置的代码,与MM_S2_Viz_Basic样例中类似。因此,下文不再重复解释与MM_S2_Viz_Basic样例相同部分的代码(详情请参考MM_S2_Viz_Basic样例说明)。 |
MODULE MM_S8_Viz_Subtask
!----------------------------------------------------------
! FUNCTION: run Mech-Viz project and get planned path
! in subtask (run together with MM_S8_Sub)
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
PERS bool flag_vis_a:=FALSE;
PERS num status_a:=2100;
PERS num pose_num_a:=5;
PERS num toolid_a{5}:=[0,0,0,0,0];
PERS num label_a{5}:=[0,0,0,0,0];
PERS num vis_pose_num_a:=3;
LOCAL VAR num count:=0;
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget pick_wait_point:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PERS jointtarget jps_a{5}:=
[
[[0,0,0,0,89,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,89,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,89,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_8()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!trigger Mech-Viz project and get planned path
trigger_vis_a;
LOOP:
!move to wait position for picking
MoveL pick_wait_point,v1000,fine,gripper1;
!wait until subtask program finished
WaitUntil(flag_vis_a=FALSE);
!check whether planned path has been got from Mech-Viz successfully
IF status_a <> 2100 THEN
!add error handling logic here according to different error codes
!e.g.: status=2038 means no point cloud in ROI
Stop;
ENDIF
!follow the planned path to pick
!move to approach waypoint of picking
MoveAbsJ jps_a{1},v1000,fine,gripper1;
!move to picking waypoint
MoveAbsJ jps_a{2},v300,fine,gripper1;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveAbsJ jps_a{3},v1000,fine,gripper1;
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!trigger Mech-Viz project and get planned path in advance
trigger_vis_a;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
GOTO LOOP;
ENDPROC
PROC trigger_vis_a()
flag_vis_a:=TRUE;
ENDPROC
ENDMODULE上述样例程序代码对应的流程如下图所示。
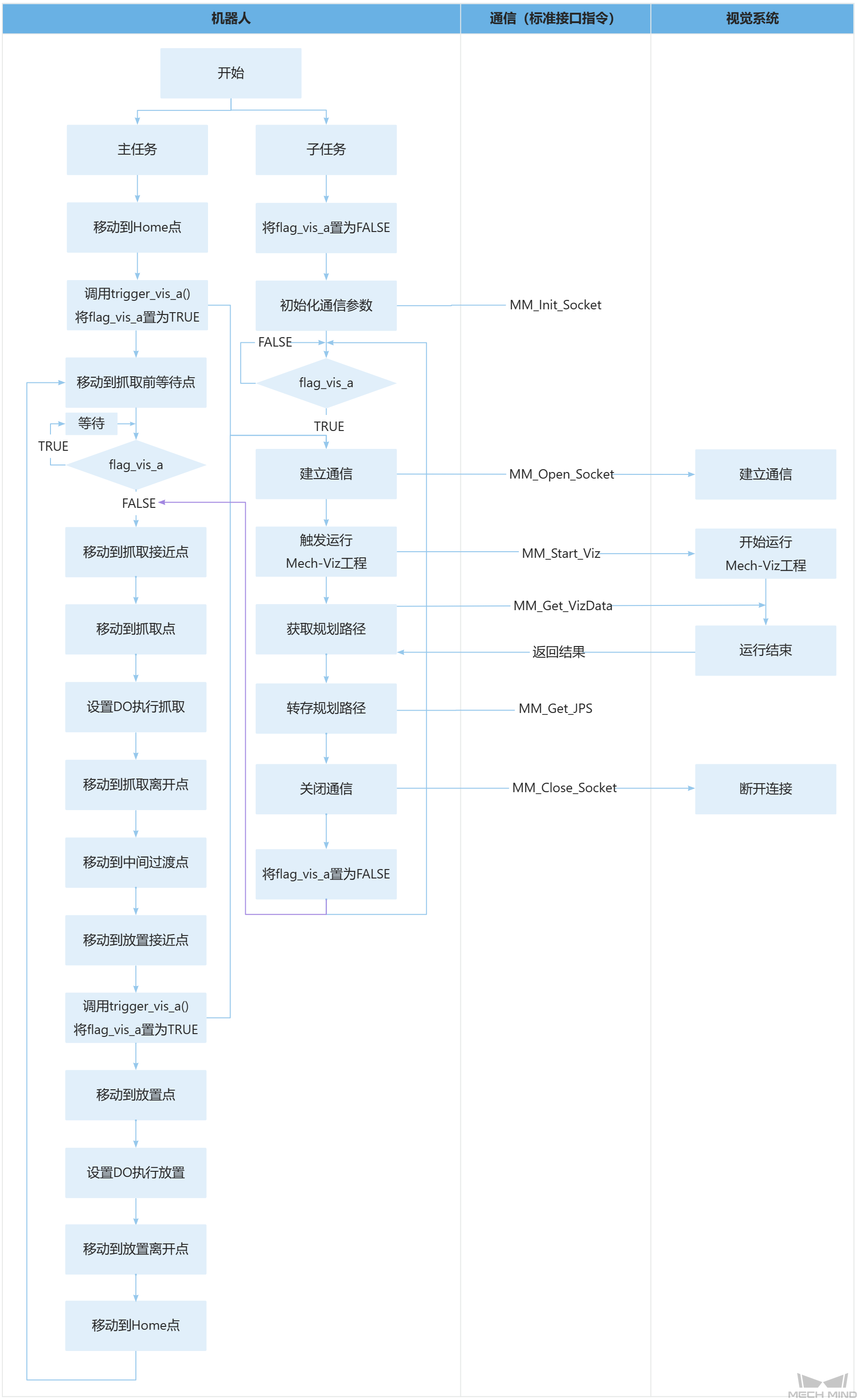
下表为主程序核心代码的逻辑解读。
| 流程 | 代码及说明 |
|---|---|
触发Mech-Viz工程运行并获取规划路径 |
上述代码表示,主程序调用trigger_vis_a()函数。该函数的代码如下所示。 上述代码表示,在trigger_vis_a()函数中将flag_vis_a设置为TRUE,此时子程序检测到flag_vis_a为TRUE,便触发Mech-Viz工程运行并获取规划路径。 |
通过循环(抓取→触发下一轮规划→放置)提前规划下一轮路径 |
上述代码表示,主程序循环执行LOOP与GOTO LOOP之间的代码。 上述代码表示,机器人移动到抓取前的一个等待点,等待子程序获取并转存规划路径(即flag_vis_a从TRUE变为FALSE)。 上述代码表示,机器人根据规划的路径先移动到抓取接近点(jps_a{1}),然后移动到抓取点(jps_a{2}),进行抓取(例如,setdo DO_1, 1;),再依次移动到抓取离开点(jps_a{3})、放置过渡点(drop_waypoint)、放置接近点(RelTool(drop,0,0,-100))。 上述代码表示,主程序程序再次调用trigger_vis_a()函数,即再次触发Mech-Viz工程运行并获取规划路径。此处机器人已处于放置区域,因此机器人此时可以提前规划下一轮抓取路径,而不必等待放置完成后再规划下一轮抓取路径。 上述代码表示,机器人先移动到放置点(drop),然后进行放置操作(例如,setdo DO_1, 0;),然后依次移动到放置离开点(RelTool(drop,0,0,-100))、Home点。 |