样例程序13:MM_S13_Vis_MoveInAdvance
程序解读
以下为MM_S13_Vis_MoveInAdvance样例程序的代码及相关解释说明。
| 与MM_S1_Vis_Basic样例相比,本样例仅新增了拍照完成即可移动的功能(加粗部分的代码)。因此,下文不再重复解释与MM_S1_Vis_Basic样例相同部分的代码(详情请参考MM_S1_Vis_Basic样例说明)。 |
NOP
'--------------------------------
'FUNCTION: trigger Mech-Vision
'project then move to wait
'position and get vision pose in
'EIH setup
'Mech-Mind, 2023-12-25
'--------------------------------
'clear I50 to I69
CLEAR I050 20
'initialize p variables
SUB P070 P070
SUB P071 P071
'set 100mm to z of P070
SETE P070 (3) 100000
'move to robot home position
MOVJ C00000 VJ=50.00
'initialize communication
'parameters (initialization is
'required only once)
CALL JOB:MM_INIT_SOCKET ARGF"192.168.170.22;50000;1"
'move to image-capturing position
MOVJ C00001 VJ=50.00 PL=0
'open socket connection
CALL JOB:MM_OPEN_SOCKET
'trigger NO.1 Mech-Vision project
CALL JOB:MM_START_VIS ARGF"1;0;2;30;80"
IFTHENEXP I080<>1102
'add error handling logic here
PAUSE
ENDIF
'move to wait position for
'picking
MOVJ C00002 VJ=50.00
'get vision result from NO.1
'Mech-Vision project
CALL JOB:MM_GET_VISDATA ARGF"1;51;52"
'check whether vision result has
'been got from Mech-Vision
'successfully
IFTHENEXP I052<>1100
'add error handling logic here
'according to different error
'codes
'e.g.: I052=1003 means no point
'cloud in ROI
'e.g.: I052=1002 means no
'vision result
PAUSE
ENDIF
'close socket connection
CALL JOB:MM_CLOSE_SOCKET
'save first vision point data to
'local variables
CALL JOB:MM_GET_POSE ARGF"1;71;61;62"
'move to intermediate waypoint of
'picking
MOVJ C00003 VJ=50.00
'move to approach waypoint of
'picking
SFTON P070
MOVL P071 V=166.6 PL=0
SFTOF
'move to picking waypoint
MOVL P071 V=50.0 PL=0
'add object grasping logic here,
'such as DOUT OT#(1) ON
PAUSE
'move to departure waypoint of
'picking
SFTON P070
MOVL P071 V=166.6 PL=0
SFTOF
'move to intermediate waypoint of
'placing
MOVJ C00004 VJ=50.00
'move to approach waypoint of
'placing
MOVL C00005 V=166.6 PL=0
'move to placing waypoint
MOVL C00006 V=50.0 PL=0
'add object releasing logic here,
'such as DOUT OT#(1) OFF
PAUSE
'move to departure waypoint of
'placing
MOVL C00007 V=166.6 PL=0
'move back to robot home position
MOVJ C00008 VJ=50.00
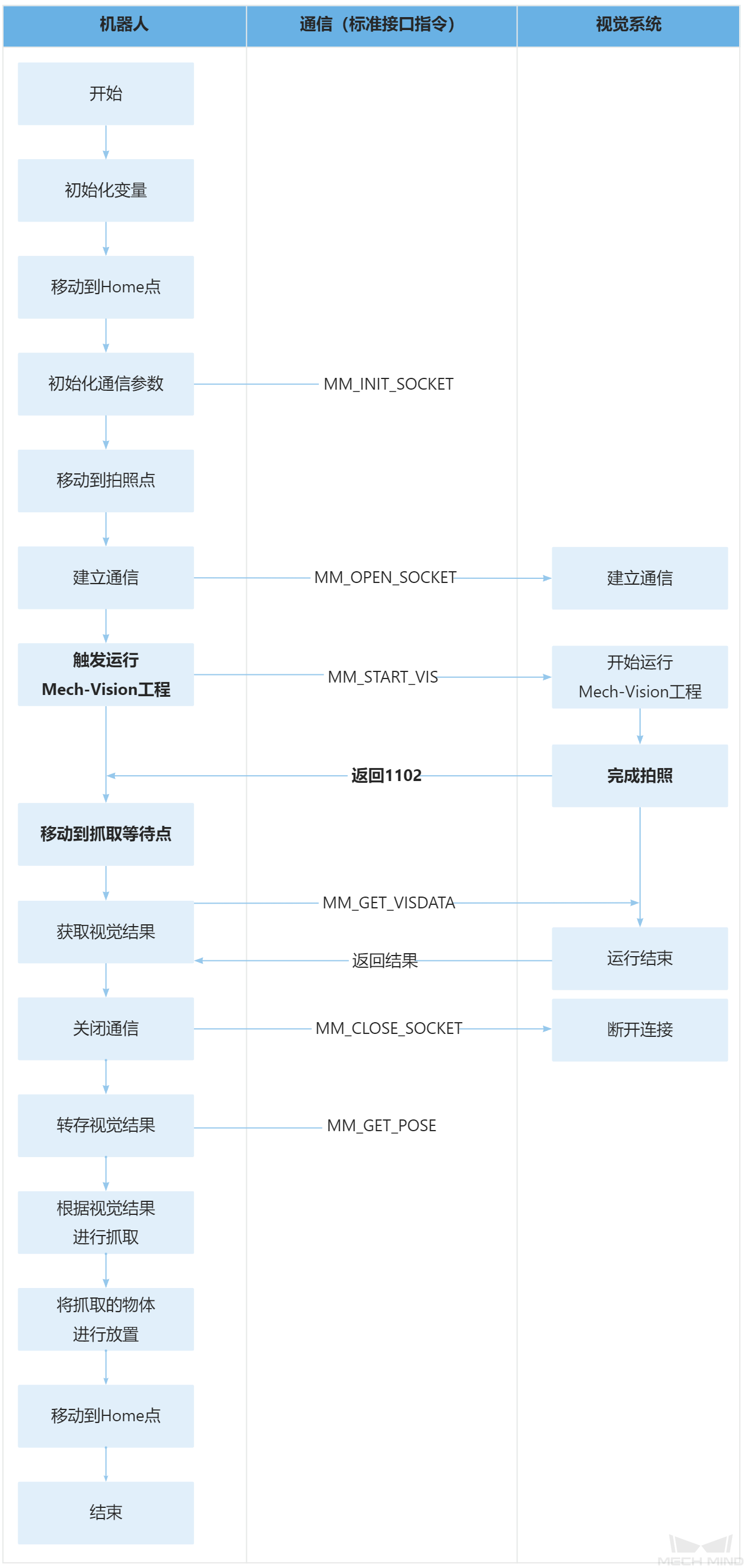
END上述样例程序代码对应的流程如下图所示。
下表为拍照完成即可移动的逻辑解读。用户单击指令名称的超链接便可查看该指令的详细说明。
| 流程 | 代码及说明 | ||||
|---|---|---|---|---|---|
机器人在拍照完成后即可移动 |
在EIH场景中,为了让机器人在相机拍照完成后能够移动而不必等待Mech-Vision工程运行结束,用户可以在Mech-Vision软件中依次单击,勾选拍照完成再返回“1102:触发成功”。这样机器人在执行MM_START_VIS指令并接收到“1102:触发成功”后,便可以开始移动,从而缩短节拍。 如果用户未进行下图中的设置,当Mech-Vision工程成功开始运行后,视觉系统便立即向机器人返回1102状态码,此时机器人无法立即移动,因为无法判断相机是否完成拍照,所以机器人只能等待Mech-Vision工程运行结束后再移动。

在上述代码中,C00002表示抓取等待点。机器人在拍照完成后,便可移动至抓取等待点,如此Mech-Vision工程运行和机器人移动可并行执行,从而缩短节拍。
|