主控通信配置
本节介绍如何将主控程序烧录到FAIRINO机器人,并完成梅卡曼德视觉系统与机器人的主控通信配置。
| 主控程序烧录是将机器人主控程序导入到机器人系统中,从而建立视觉系统与机器人的主控通信。 |
烧录前准备
设置网络连接
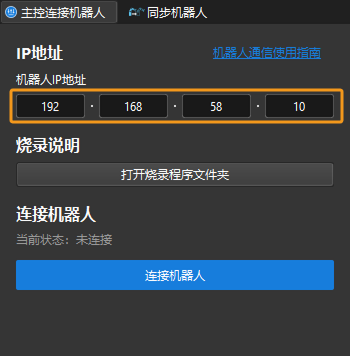
按钮盒接口默认为示教器控制端口,IP地址为192.168.58.2,因此,用户只需设置工控机IP地址即可,具体如下。
-
使用网线连接按钮盒网口与工控机网口。
-
在工控机上,打开谷歌浏览器,在地址栏中输入http://192.168.58.2,即可访问示教器页面。
初始用户名为admin,密码为123。
烧录文件至机器人中
-
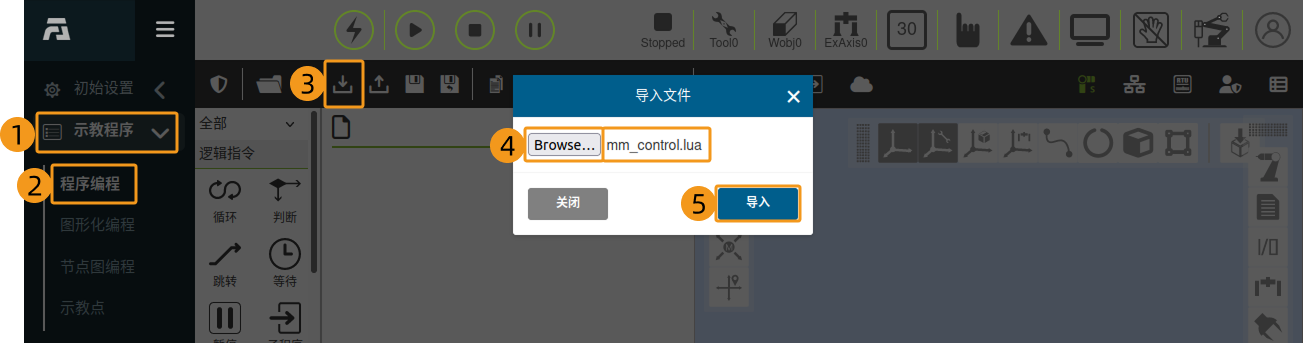
在手动模式下,按如下操作烧录主控程序。
-
依次点击,弹出导入文件窗口,点击Browse…。
-
在弹出的文件浏览器中,选择
Mech-Vision和Mech-Viz软件安装路径/Communication Component/Robot_Server/Robot_FullControl/fr目录下的mm_control.lua文件,点击打开。 -
最后,在导入文件窗口,点击导入。
-
-
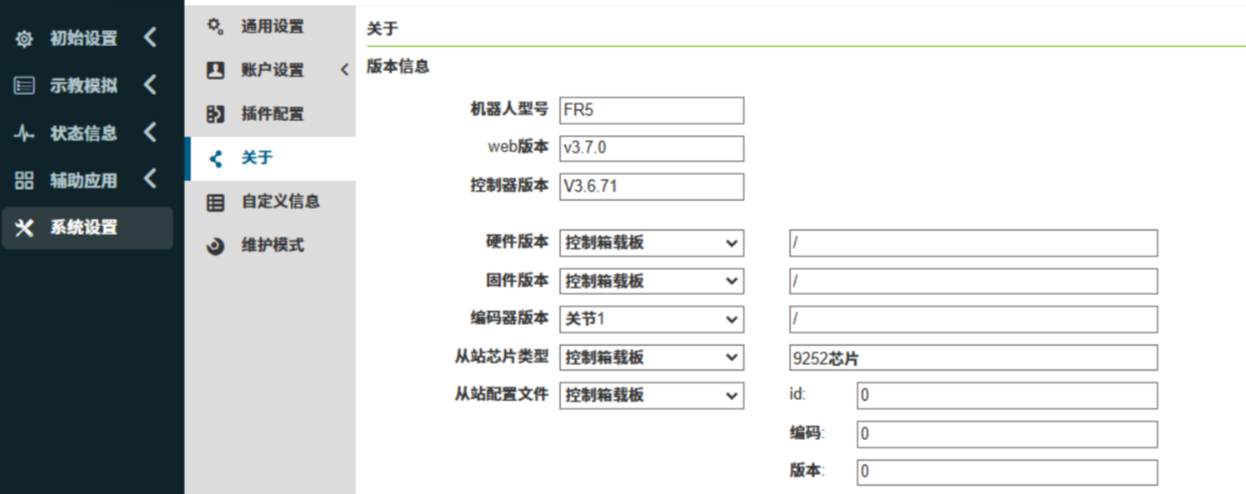
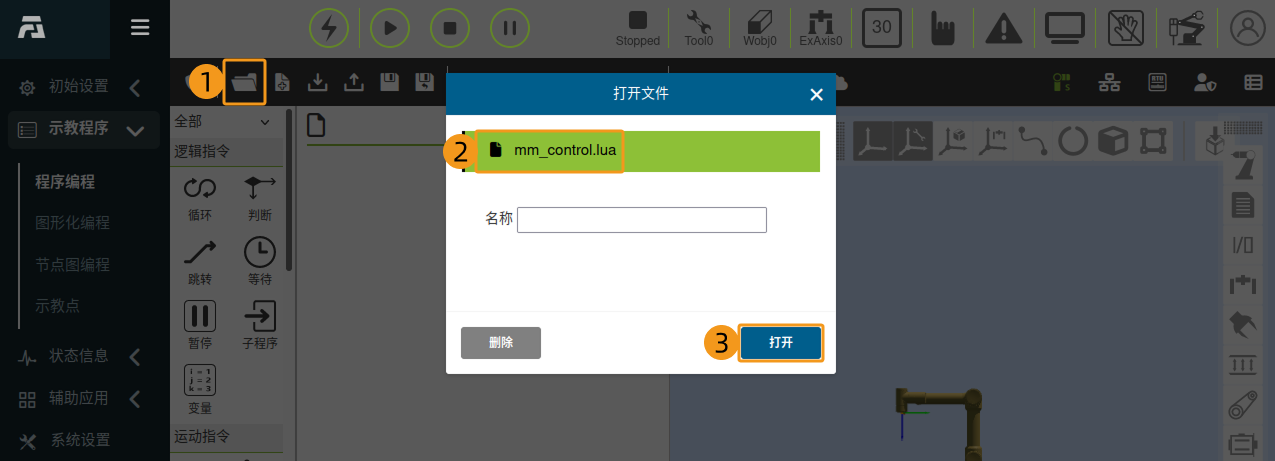
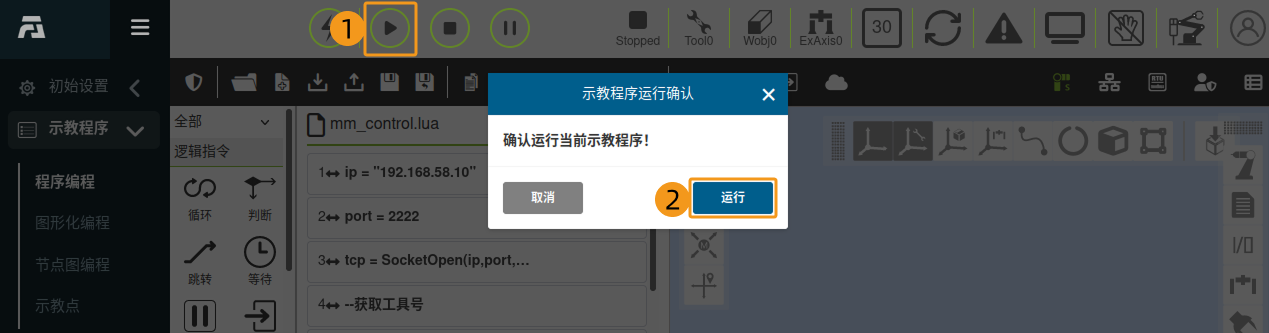
点击打开文件夹图标,在弹出的窗口中,选中mm_control.lua文件,点击打开,便可看到主控程序的详细代码。
测试主控通信
创建Mech-Viz工程
-
打开Mech-Viz软件,按下键盘上 Ctrl + N(新建工程)。在如下界面中,单击 获取在线机器人列表,根据真实机器人的品牌和型号,选择对应的机器人模型。
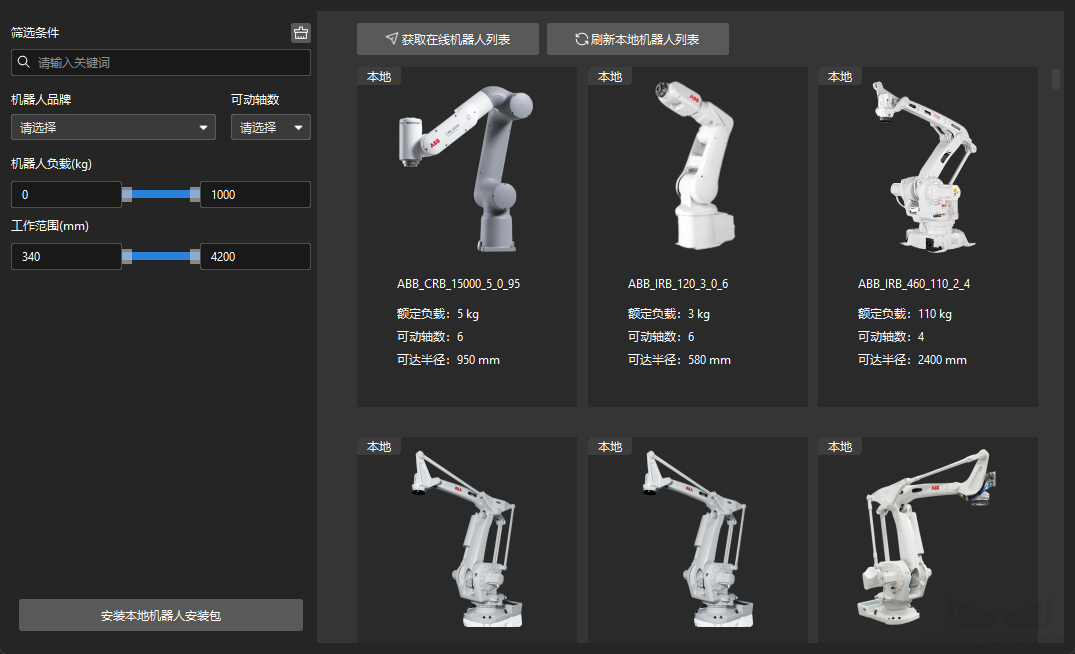
-
按下键盘上 Ctrl + S,创建或选择文件夹,以保存工程。
-
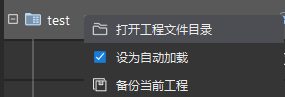
在Mech-Viz软件的左侧窗口中,右键单击工程名称,勾选 设为自动加载。



注意事项
-
若机器人网页界面出现500错误,请在Mech-Viz中重新连接机器人,并重新运行主控程序。
-
若机器人网页界面出现奇异点错误,请手动将机器人拖拽到非奇异点位置,然后清除报警,并重新运行主控程序。
-
在运行主控程序后,若程序卡死,机器人无法接收Mech-Viz发送的数据,请联系机器人厂家升级控制器系统版本。
-
请勿在按下紧急停止按钮时开机,否则会出现未知错误!
-
若有其他报错无法清除,请尝试重启机器人。