样例程序6:MM_S6_Vis_Timer
程序解读
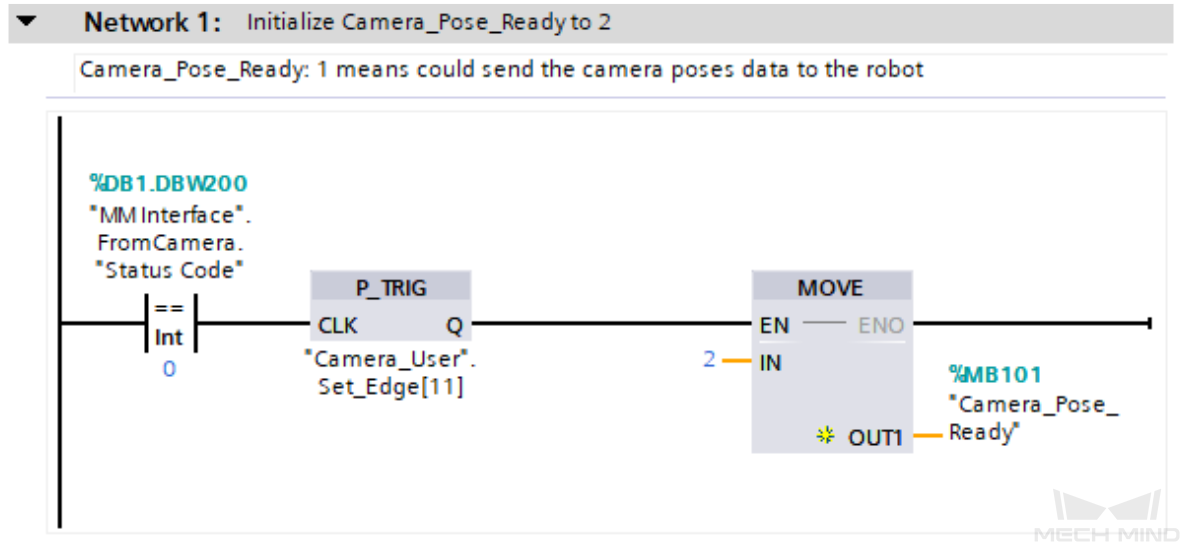
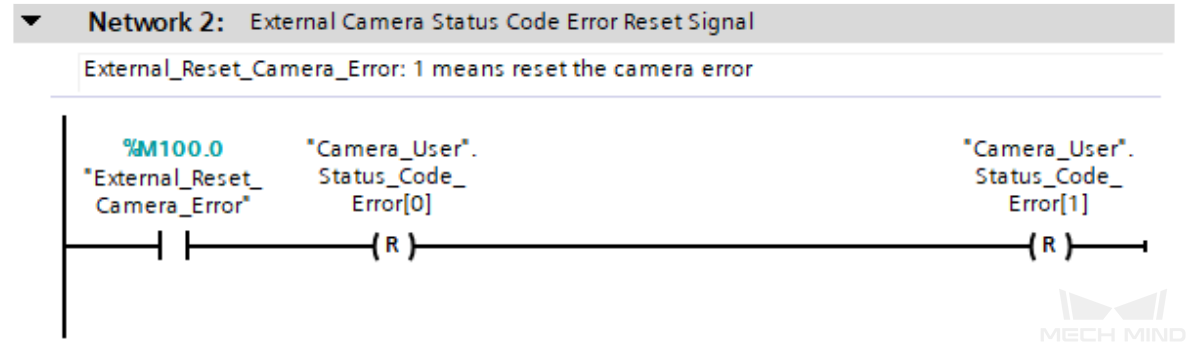
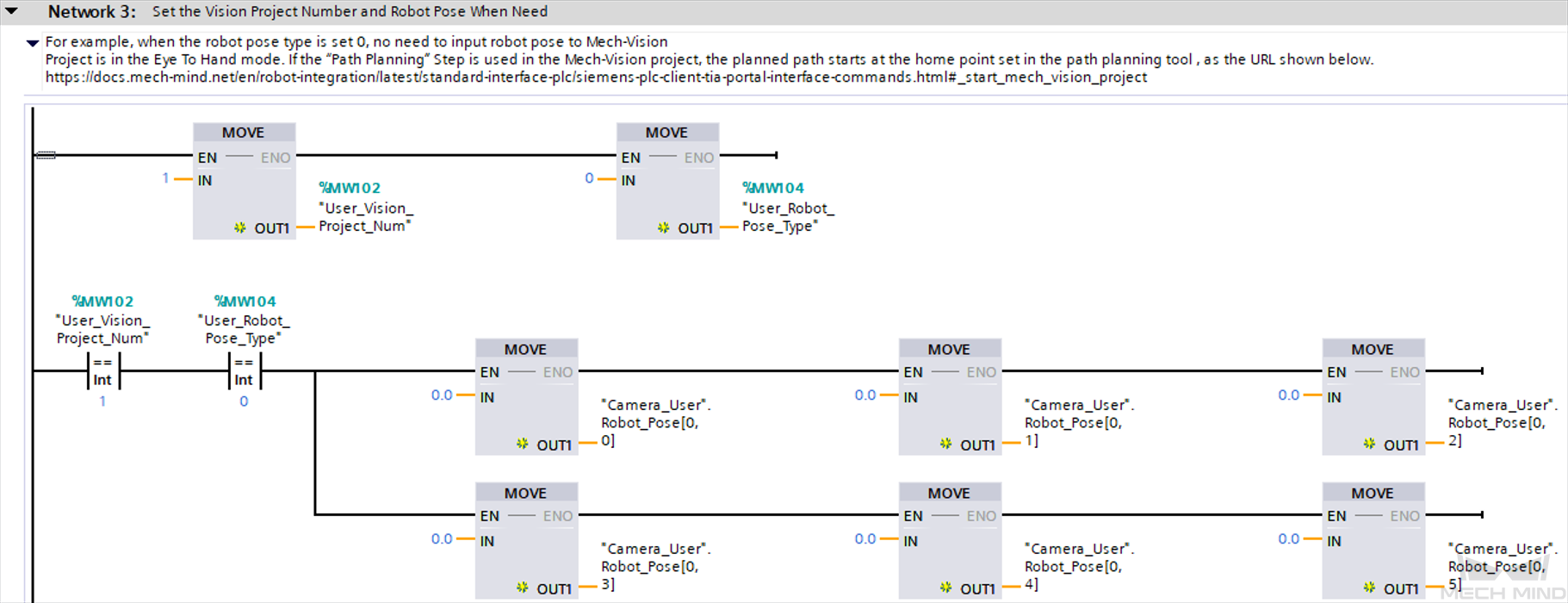
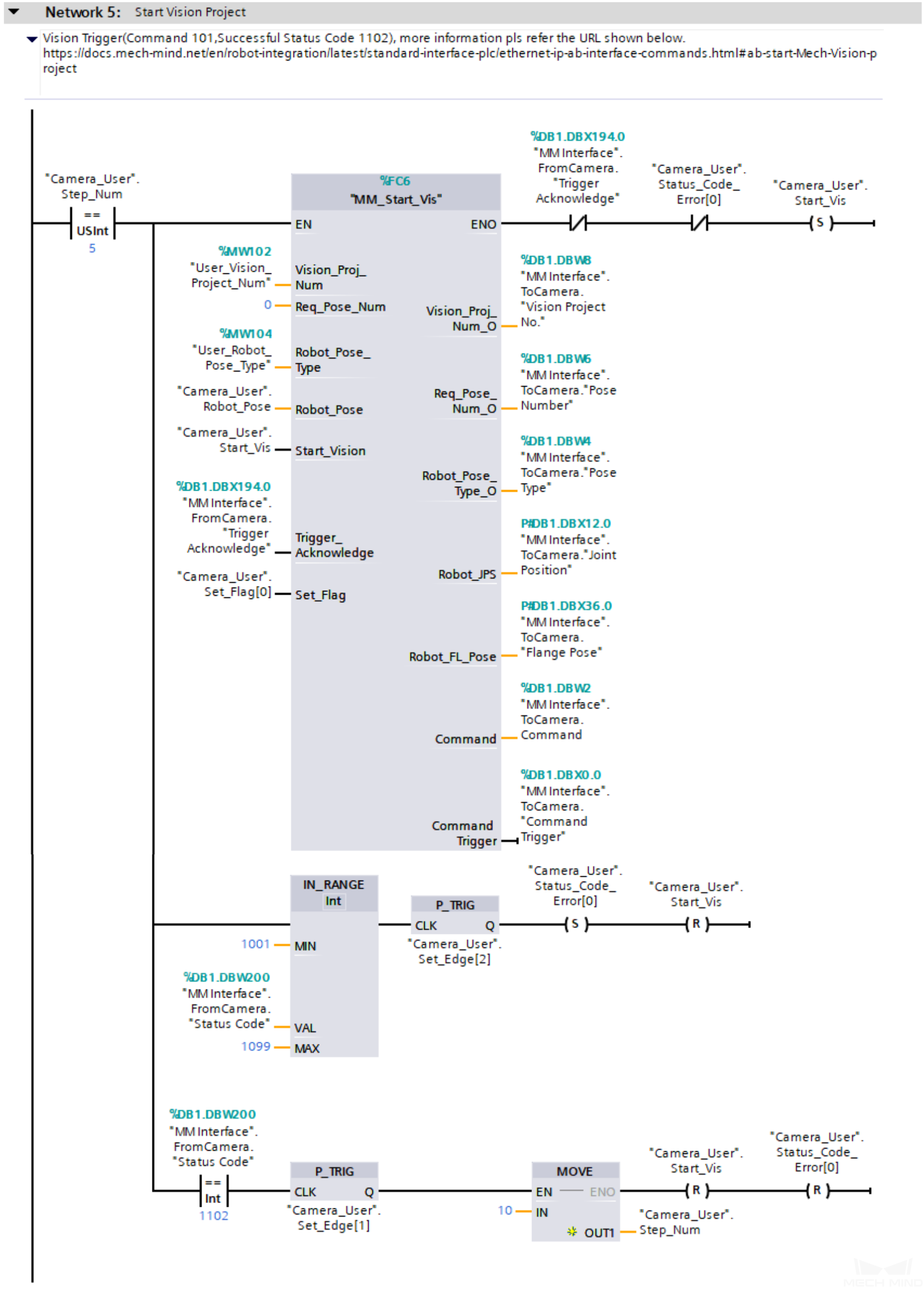
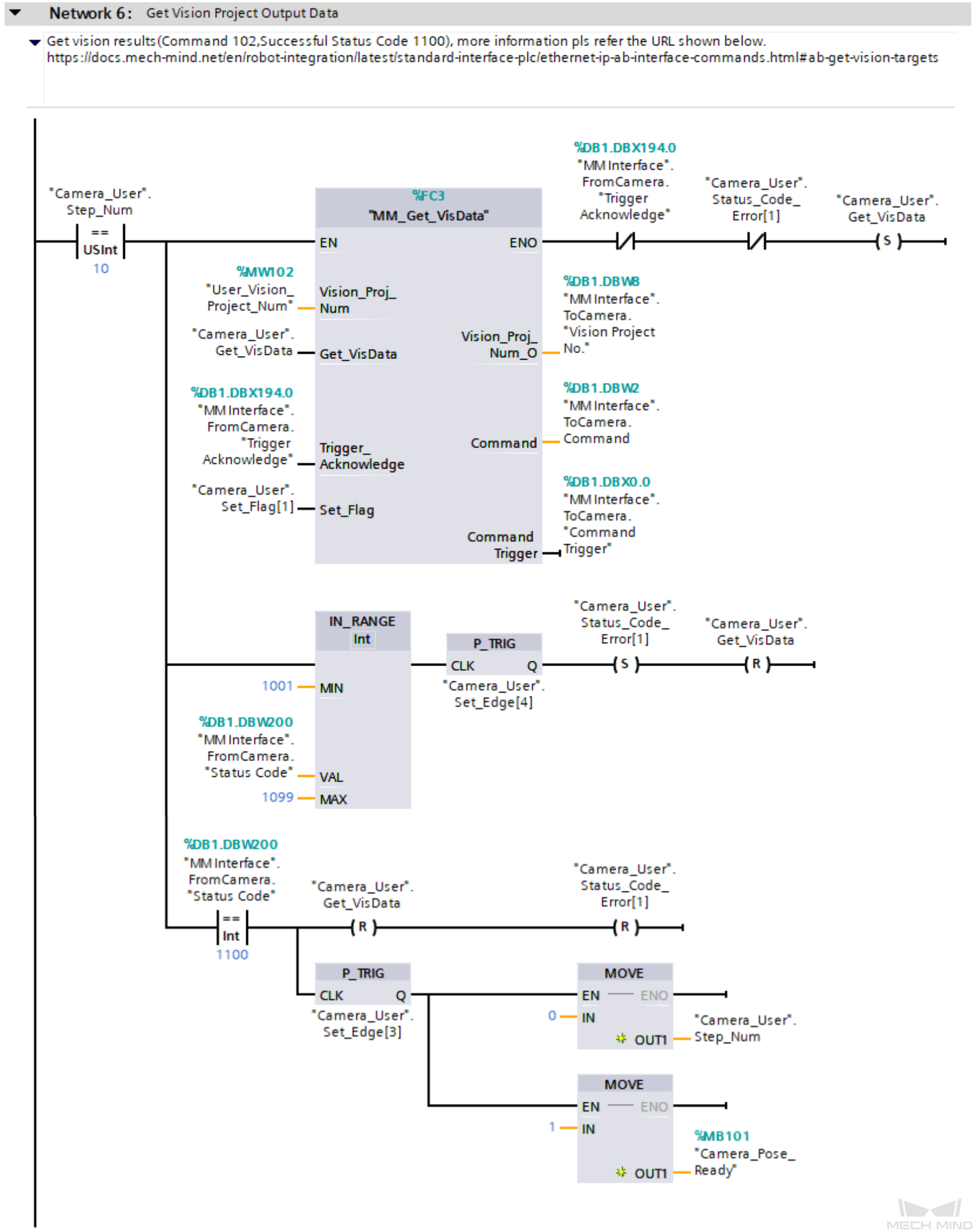
以下为MM_S6_Vis_Timer样例程序的梯形图及相关解释说明。
| 与MM_S1_Vis_Basic样例相比,本样例新增了计算视觉节拍的功能(Network 7)。因此,下文不再重复解释与MM_S1_Vis_Basic样例相同部分的逻辑(详情请参考MM_S1_Vis_Basic样例说明)。 |
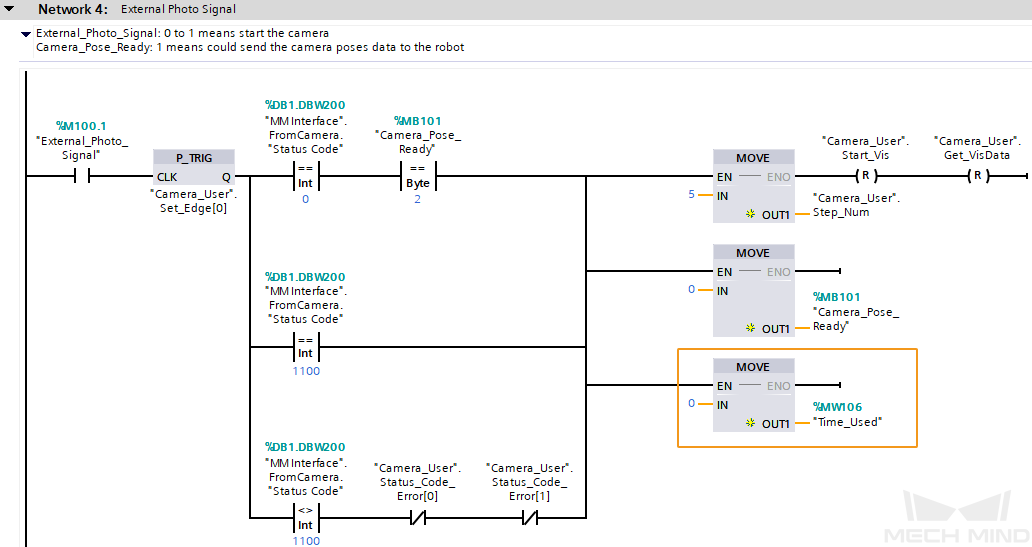
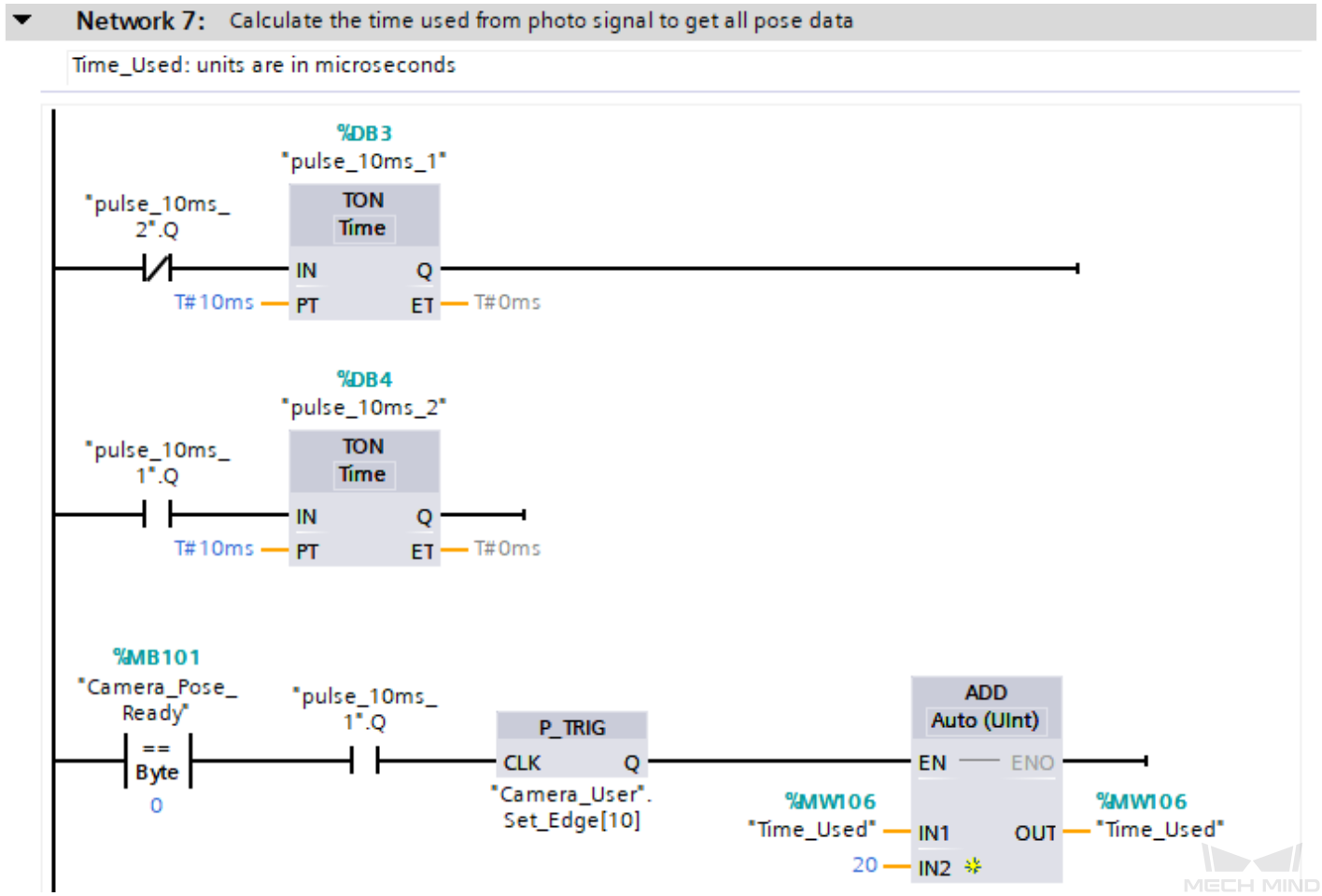
在上述样例程序梯形图中,计算视觉节拍对应的流程如下图所示。
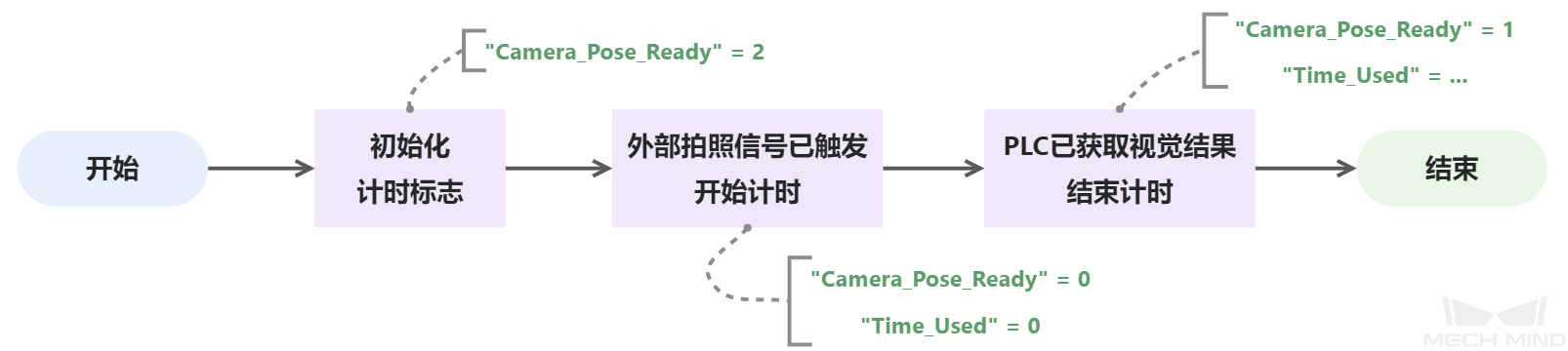
下表为计算视觉节拍的逻辑解读。
|
关于西门子S7系列PLC自带的常用基本指令,可参考常用指令说明。 |
| 流程 | 梯形图及说明 |
|---|---|
计算视觉节拍 |
Network 7表示,通过计时器计算视觉节拍,具体逻辑如下。
|