使用 CRX 插件进行自动标定
本节介绍使用 CRX 插件进行自动标定的过程。
创建标定程序
-
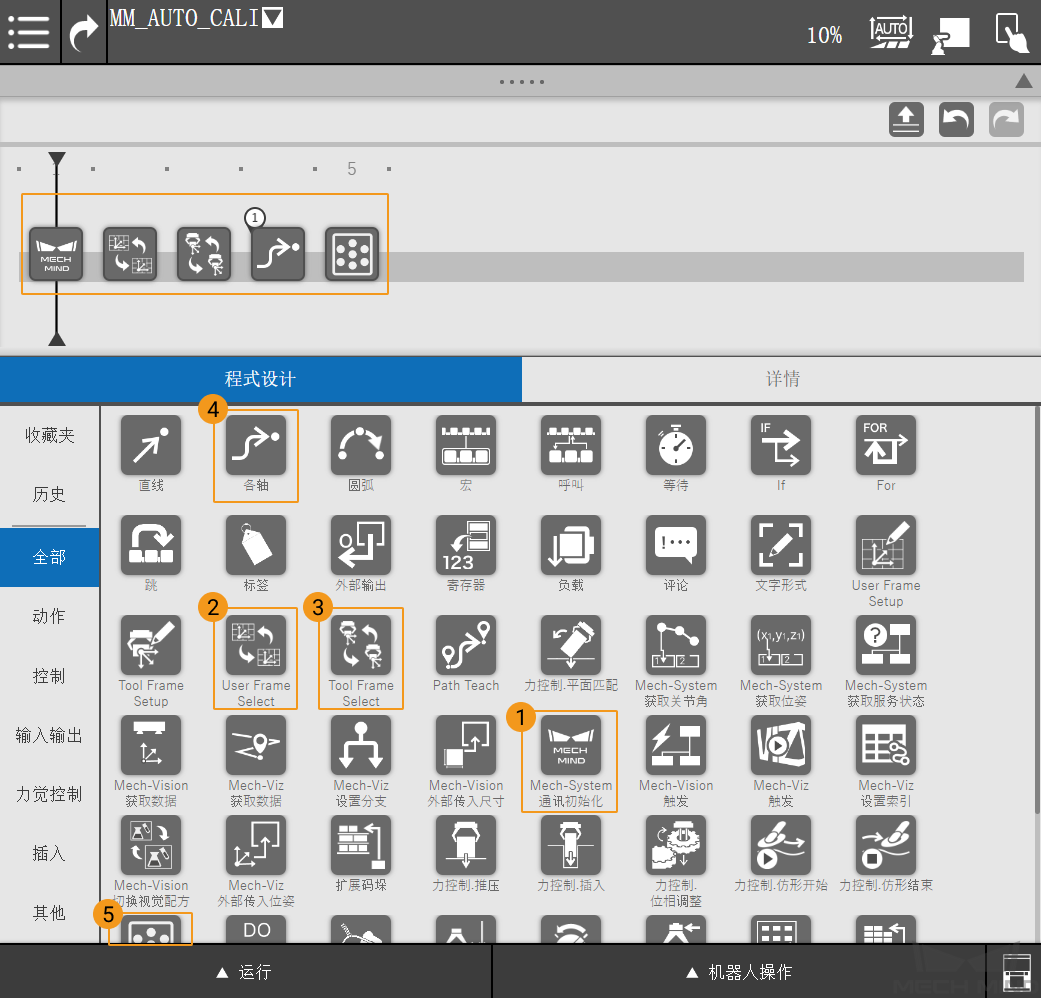
新建一个机器人程序(本示例名称为 MM_AUTO_CALI),选择 程式设计 ,从左侧 全部 指令列表中依次拖入以下指令:Mech-System 通讯初始化、User Frame Select(选择用户坐标系)、Tool Frame Select(选择工具坐标系)、各轴(移动)、Mech-Eye 相机标定。
-
单击 Mech-System 通讯初始化 ,进入该指令的详情页面。将此处的 IPC 的 IP 地址 设置为工控机 IP,将 IPC 端口 设置为 Mech-Vision 中配置的端口号。

-
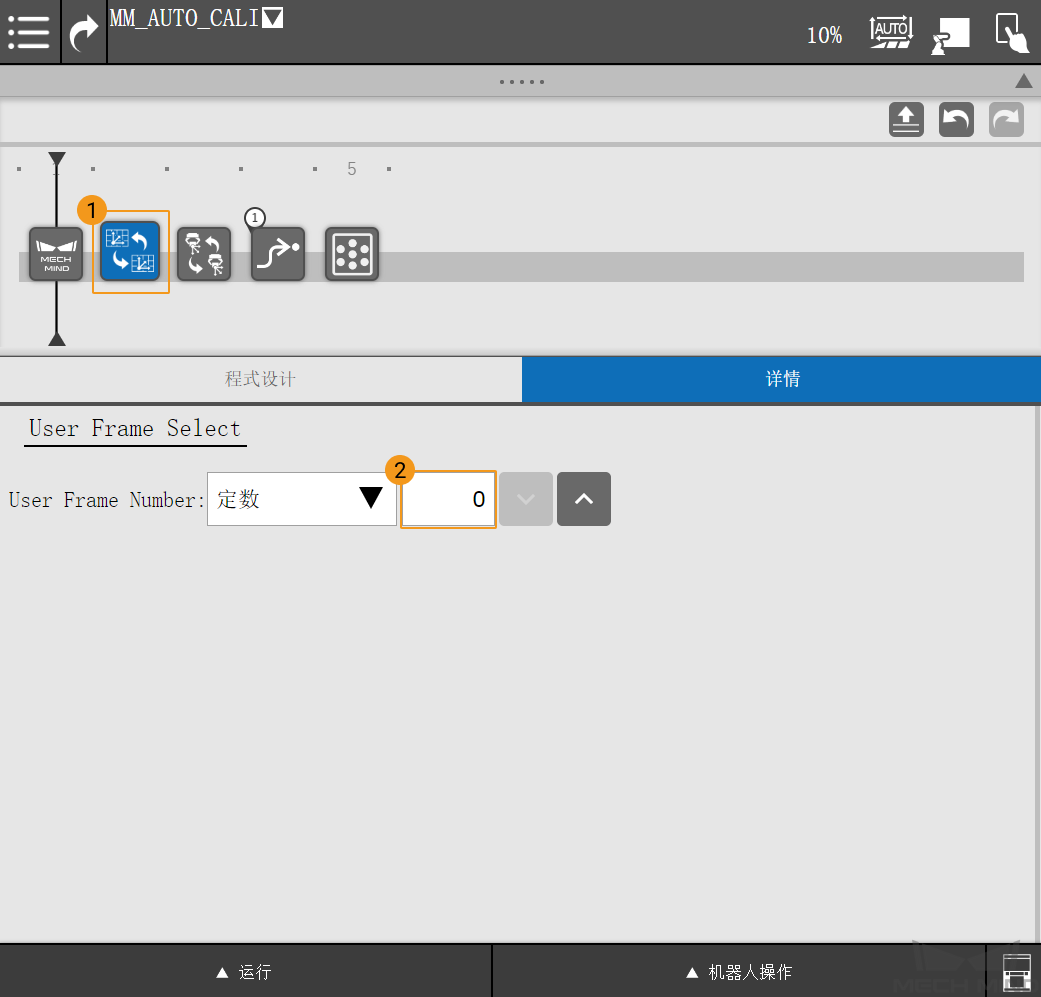
单击 User Frame Select ,选择 0 号用户坐标系(User Frame)。
-
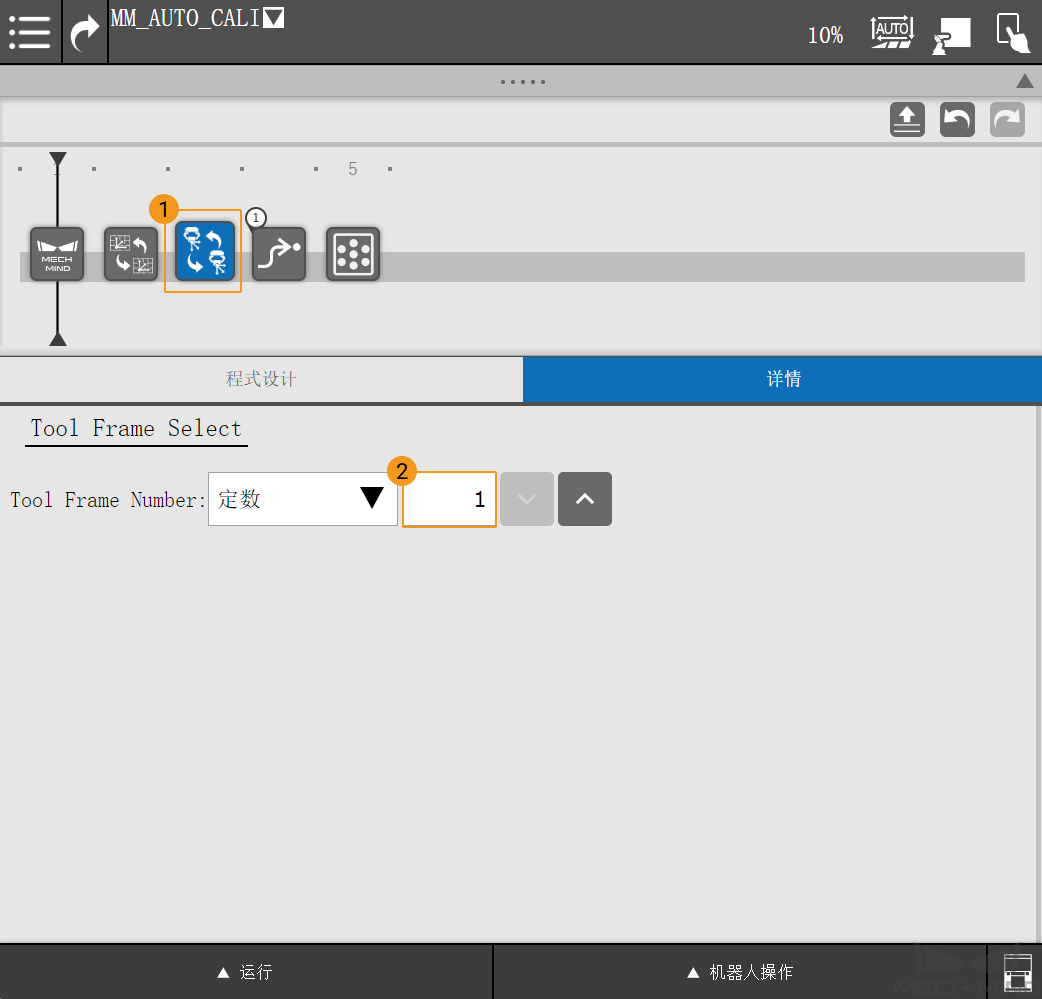
单击 Tool Frame Select ,选择 1 号工具坐标系(Tool Frame)。
示教标定起始点
-
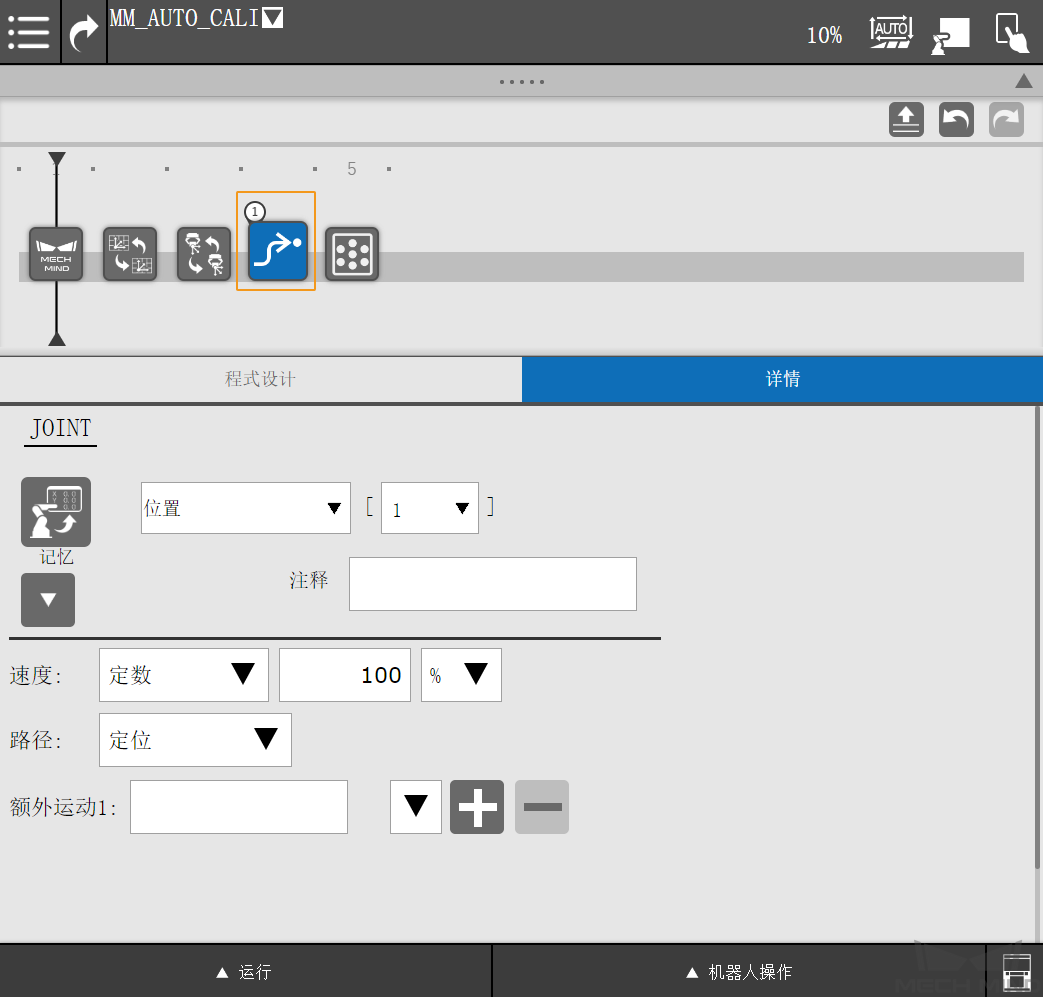
单击 各轴 移动。
-
手动移动机器人到标定起始点位,自动标定的起始点位于标定轨迹最下层的中心点。
-
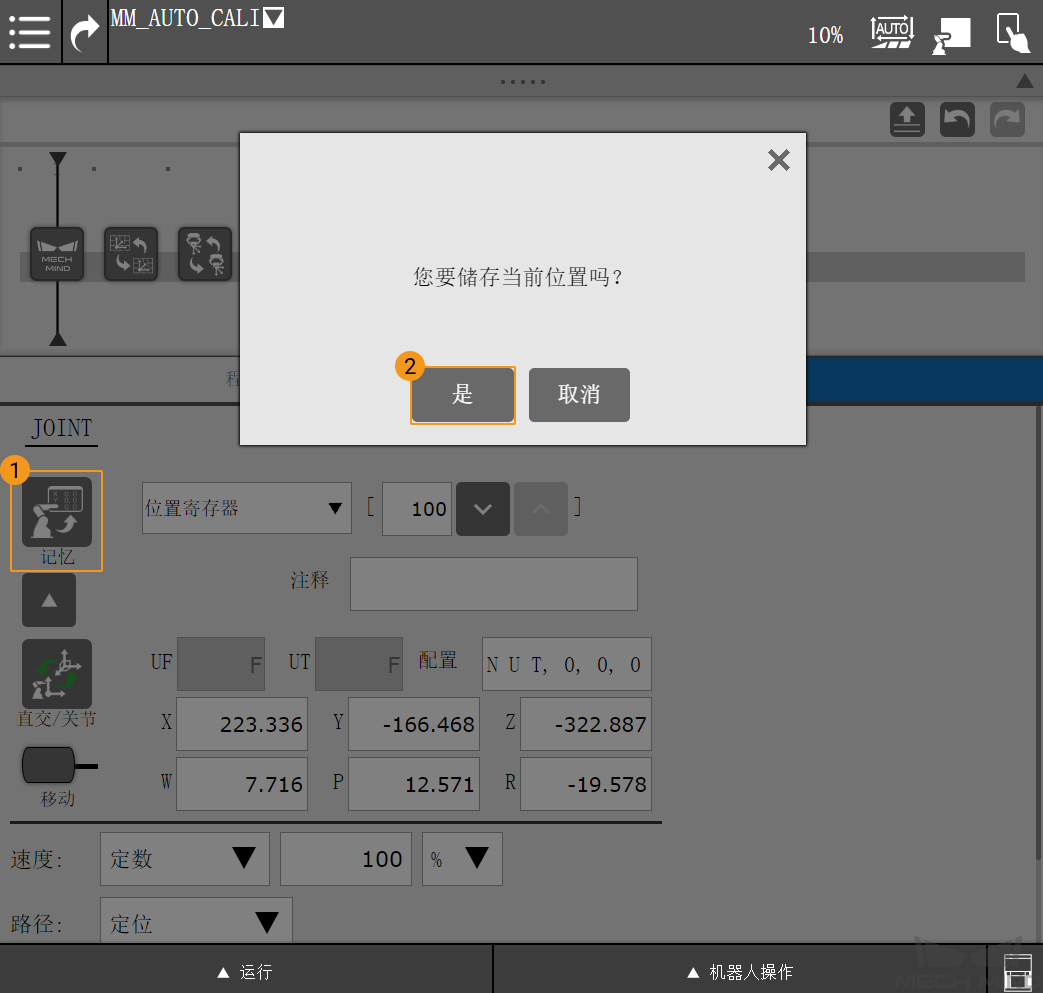
选择 位置寄存器 ,输入寄存器编号(本示例使用寄存器 100)。单击
 ,显示 直交/关节 按钮。
,显示 直交/关节 按钮。
-
单击 直交/关节 ,切换至直交。

-
单击 记忆 ,弹出对话框,单击 是 ,保存标定开始点位。
-
-
单击 Mech-Eye 相机标定 ,按下图所示设置参数。
-
移动方式:自动标定过程,机器人的移动方式。
-
数据类型:机器人发送的点位类型。
-
到位等待:设置拍照延迟时间,防止机器人到位后抖动。
-
位置寄存器编号:需要设置为上一步存储标定起始点位置的寄存器编号。

-
运行标定程序
-
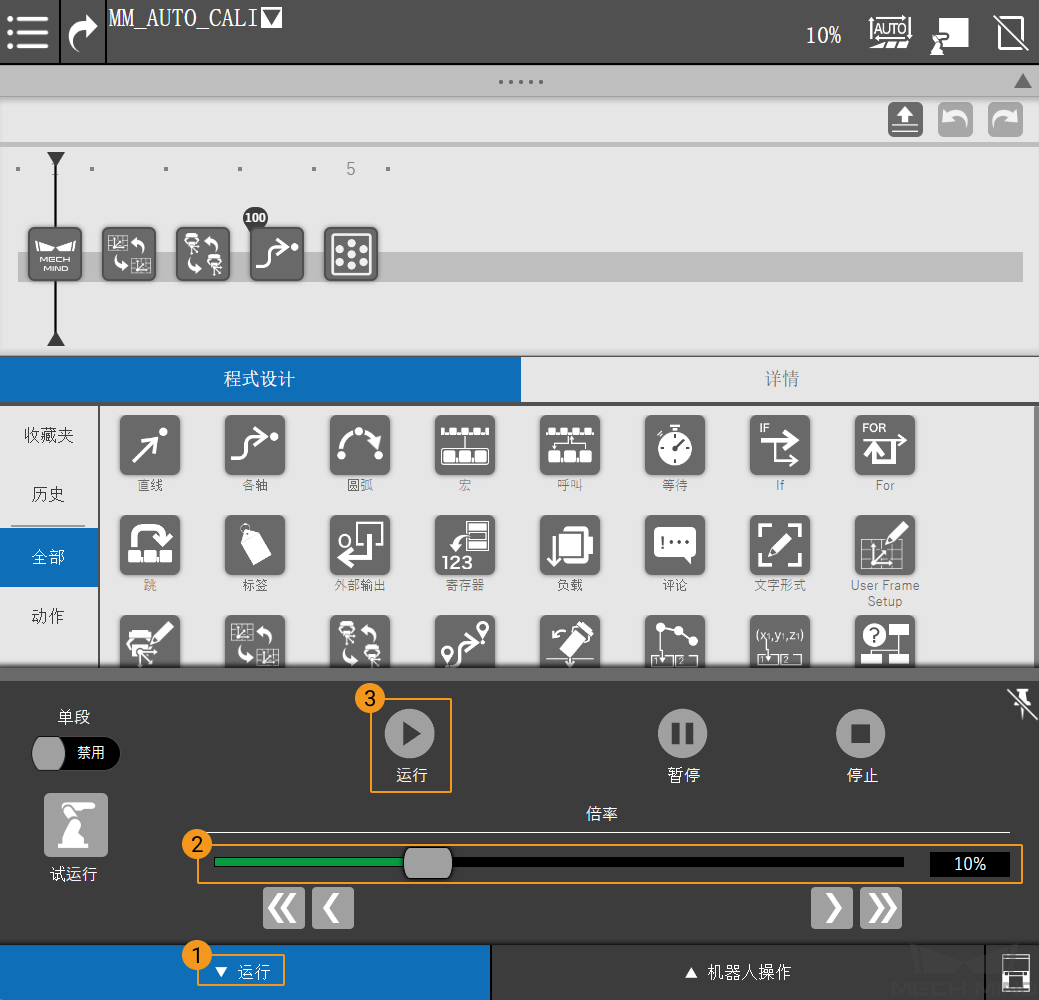
切换至自动模式,单击左下角 运行 选项,将速度稍微降低,然后单击 运行 。
-
Mech-Vision 日志栏的 控制台 标签页中显示“进入标定流程,请在 Mech-Vision 中启动标定”。
在 Mech-Vision 中完成标定
-
启动 Mech-Vision 软件,单击 相机标定(标准) 或在菜单栏中依次单击打开标定工具。
-
根据相机的安装方式,按照软件提示完成剩余操作。
-
若相机安装方式为 Eye to Hand 模式,则参考《Eye to Hand 场景下的自动标定》。
-
若相机安装方式为 Eye in Hand 模式,则参考《Eye in Hand 场景下的自动标定》。
-
完成手眼标定后,你可以 创建抓放程序 来控制 FANUC CRX 系列机器人执行视觉引导的抓取作业。