ABB RobotWare 6自动标定
本节介绍ABB RobotWare 6机器人在与梅卡曼德视觉系统进行标准接口通信时如何完成自动标定。
标定前准备
根据相机安装的方式,请分别参考如下链接完成标定前的准备操作。
-
若相机安装方式为Eye to hand,请参考《Eye to hand场景下的自动标定》中“标定前准备”小节内容。
-
若相机安装方式为Eye in hand,请参考《Eye in hand场景下的自动标定》中“标定前准备”小节内容。
标定预配置
-
打开Mech-Vision软件,单击工具栏中相机标定(标准)按钮,弹出标定预配置窗口。
-
在选择如何标定界面,选择开始新的标定,然后单击下一步按钮。
-
在选择标定任务界面,从下拉列表框中选择品牌机器人的手眼标定,单击选择机器人型号按钮以选择项目使用的机器人型号,然后单击下一步按钮。
-
在选择相机安装方式界面,选择项目使用的相机安装方式,然后单击下一步按钮。
-
在标定方法及机器人控制方式界面,选择自动标定和标准接口,然后单击下一步按钮。
-
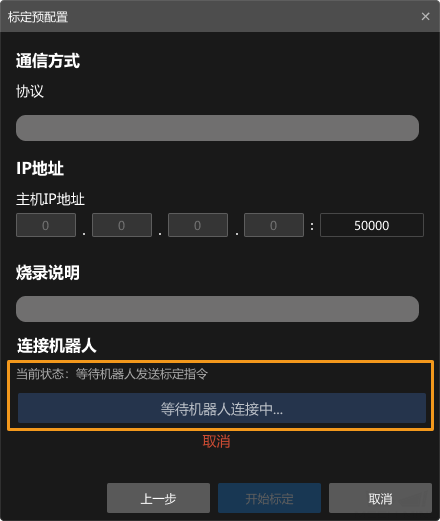
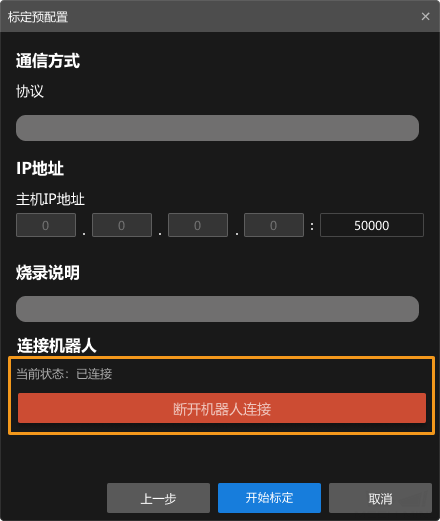
在通信方式界面,协议使用默认值。如果连接机器人下显示启动接口服务按钮,则单击该按钮,此按钮将变为等待机器人连接中…。
-
主机IP地址对应的端口号默认为50000。如果方案确定的端口不是50000,请根据实际修改。
-
操作完此步后,请勿关闭标定预配置窗口。
-
选择和修改标定程序
| 在开始前,请确保已完成ABB RobotWare 6标准接口通信配置。 |
在手动模式下,选择,在T_ROB1下找到并打开MM_Auto_Calib程序模块。确认程序中MM_Init_Socket指令的IP地址为工控机IP地址,且端口号为Mech-Vision软件中设置的主机端口号。具体操作可参考选择和修改通信测试程序。


示教标定起始点
-
将机器人手动移动到标定起始点位置。
-
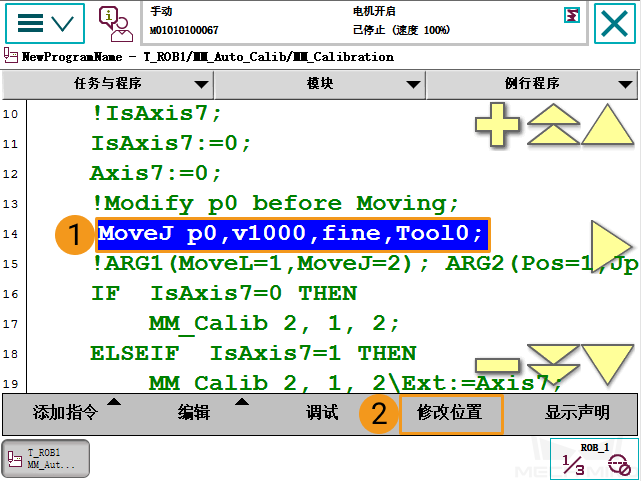
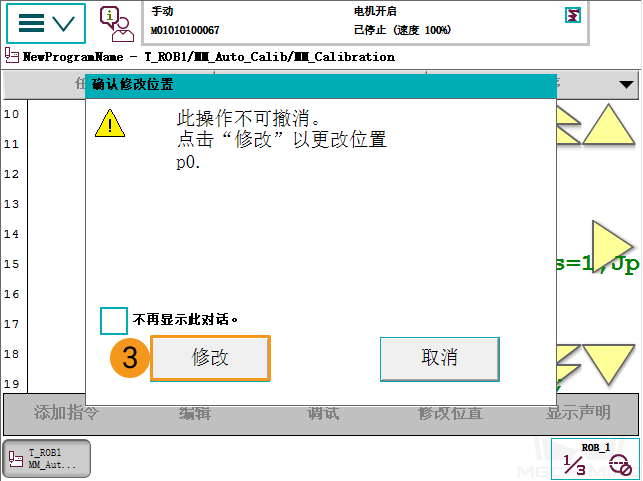
选中如下代码行,点击修改位置,在弹出的窗口中点击修改,便可将机器人当前位姿保存到P0。
-
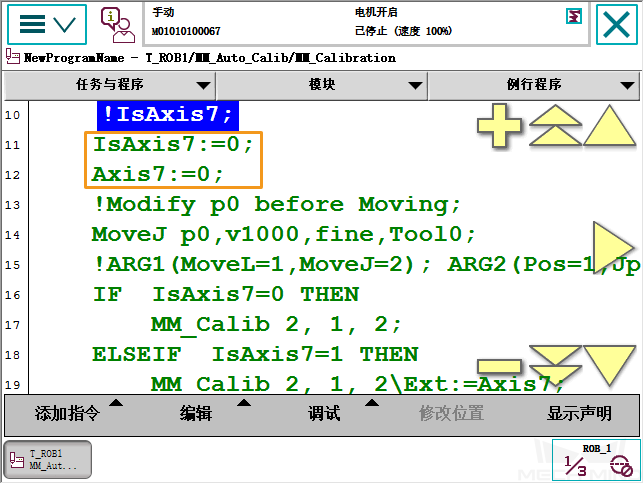
若现场有第7轴导轨,且机器人控制导轨运动,请将“IsAxis7 :=0;”修改为“IsAxis7 :=1;”,并将Axis7修改为当前第七轴的值(Axis7 :=XX,XX为具体第七轴的值)。若现场没有导轨,或者导轨由PLC控制,请忽略此步。
运行标定程序
-
在手动模式下,在MM_Auto_Calib程序界面,依次点击。
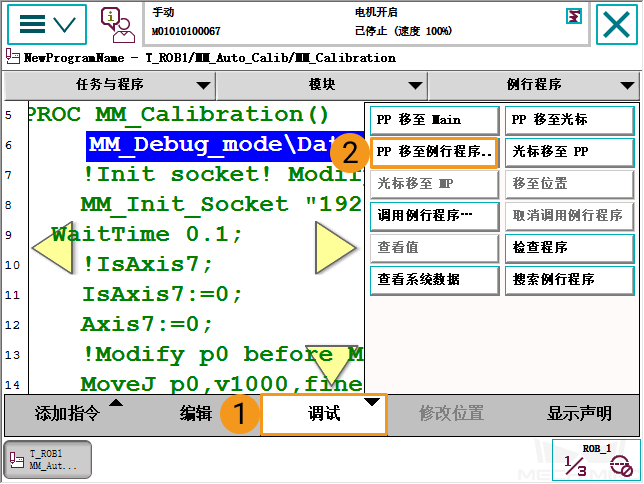
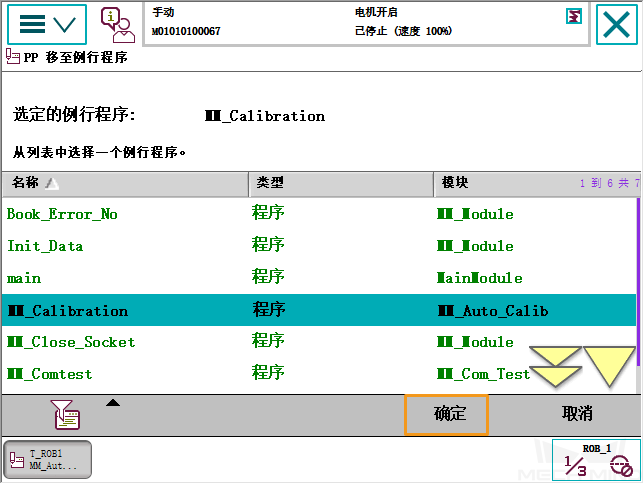
-
确认选中MM_Calibration后,点击确定。
-
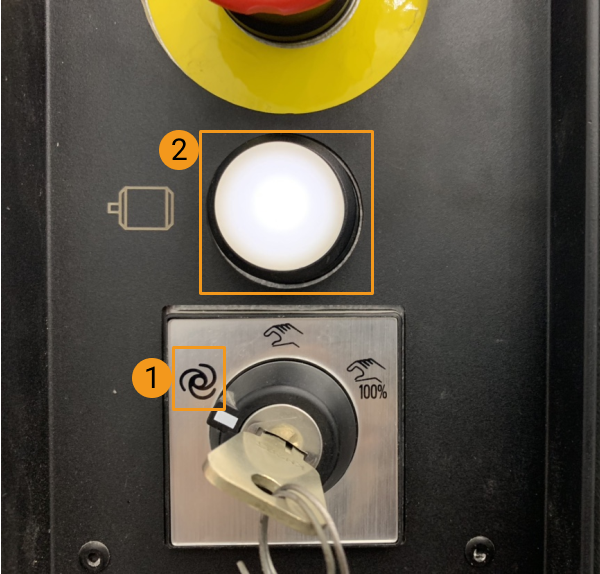
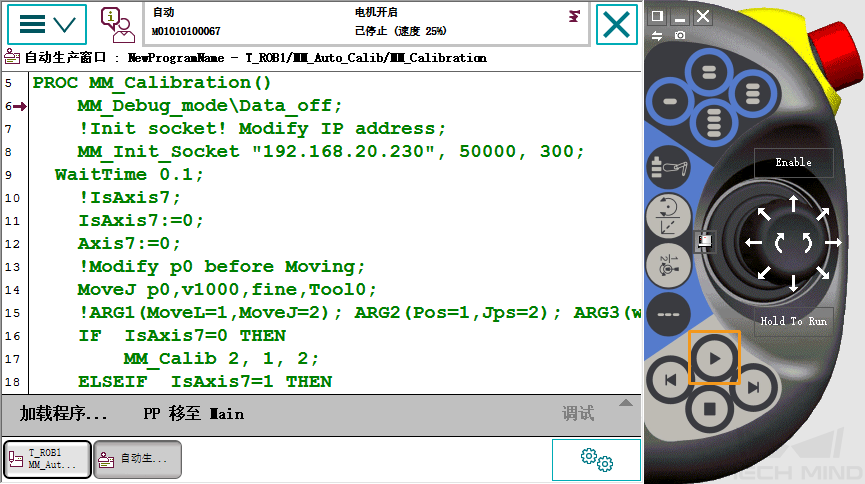
将控制柜上的开关转到自动模式,同时确保电机指示灯处于点亮状态。
-
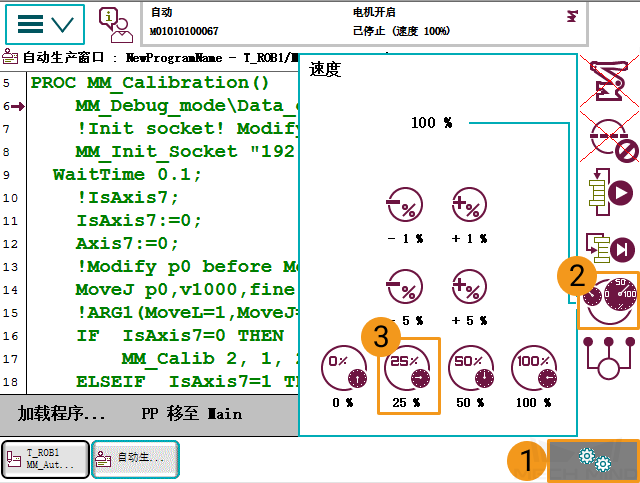
点击界面右下角,调整速度为25%。
-
在如下界面中,按下运行按钮,同时观察Mech-Vision中标定预配置窗口,在连接机器人区域显示“已连接”状态信息后,且按钮由等待机器人连接中…变为断开机器人连接,单击开始标定按钮。标定窗口将弹出。
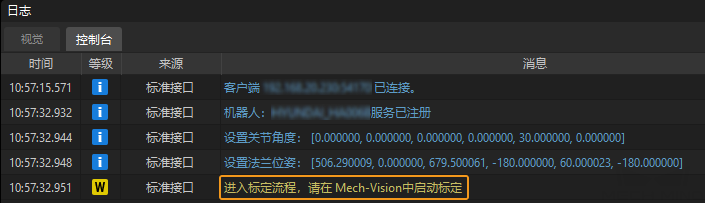
同时,Mech-Vision日志窗口的控制台标签页下会出现相关提示。
标定流程
根据相机安装的方式,请分别参考如下链接完成标定流程操作。
-
若相机安装方式为Eye to hand,请参考《Eye to hand场景下的自动标定》中“标定流程”小节内容。
-
若相机安装方式为Eye in hand,请参考《Eye in hand场景下的自动标定》中“标定流程”小节内容。
切换外参文件
如果之前Mech-Vision工程已经使用相机的外参文件,在完成手眼标定后,需要将Mech-Vision工程使用的外参文件切换为新的外参文件。
-
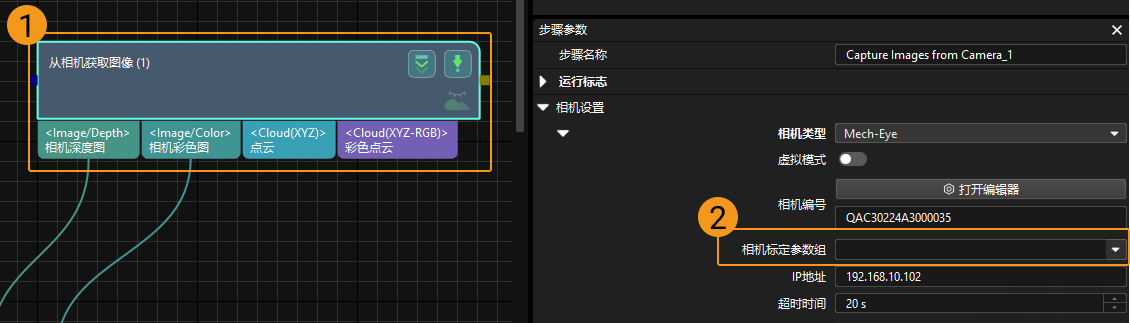
选择从相机获取图像步骤。
-
在步骤参数面板中,单击相机标定参数组的
 ,选择新标定的外参文件。
,选择新标定的外参文件。