Adapter通信
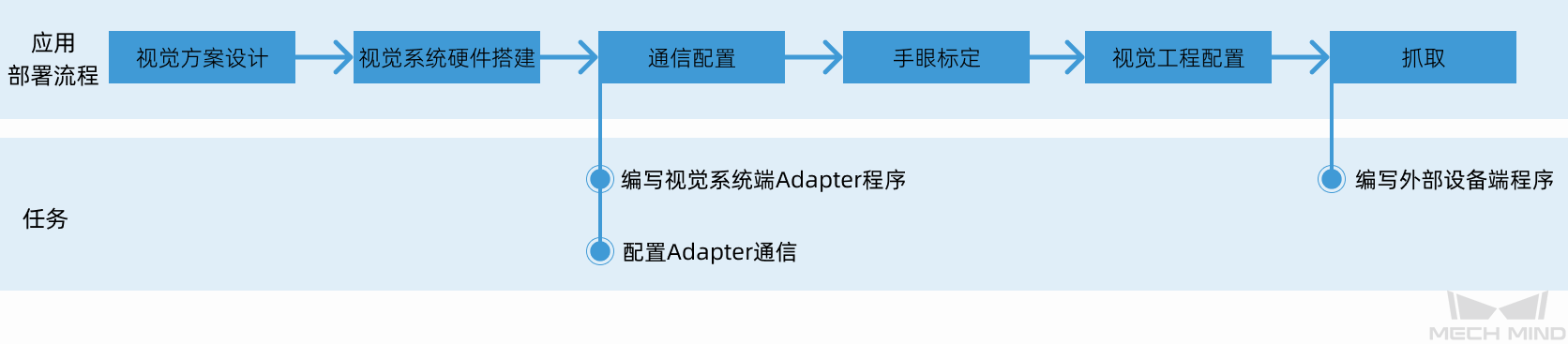
在了解Adapter通信基本概念后,用户接下来需结合实际项目及所用的外部设备,在实际应用部署流程中,完成Adapter通信相关的任务。
| 本手册主要介绍部署流程中与通信相关的部分。关于部署流程中的其他详细任务,请参考应用部署流程中各小节的介绍。 |
| 任务 | 说明 |
|---|---|
编写视觉系统端Adapter程序 |
Adapter程序是连接外部设备与视觉系统的桥梁,对内与Mech-Vision和Mech-Viz进行通信,对外与机器人、PLC或上位机进行通信。 Adapter程序是通过Python代码实现的,具体实现有以下两种方法。
|
配置Adapter通信 |
将编写的Adapter程序配置到视觉系统,确保视觉系统端已开启Adapter通信服务,具体操作可参考配置Adapter通信。 |
编写外部设备端程序 |
外部设备端程序的主要功能是从视觉系统端获取目标物体信息或机器人移动路径,然后引导机器人、PLC或上位机进行相应的操作。 |