DOBOT CR系列标准接口通信配置
本教程介绍如何为DOBOT CR系列机器人配置标准接口通信。
烧录前准备
检查硬件和软件版本
本教程介绍了如何使用DOBOT CR系列机器人以及DOBOT PC端软件DobotStudio Pro配置DOBOT标准接口通信。
请使用如下机器人控制器版本和DobotStudio Pro版本。其他版本尚未经过测试,无法确定是否能成功连接。
-
PC控制软件名称及版本:DobotStudio Pro v2.7.1及以上。
|
用户可访问越疆机器人官网下载中心,在控制软件区域找到所需软件版本并点击 |
-
控制器版本:3.5.6.1-stable及以上。
-
控制器型号:CC-162。
查看控制器版本
-
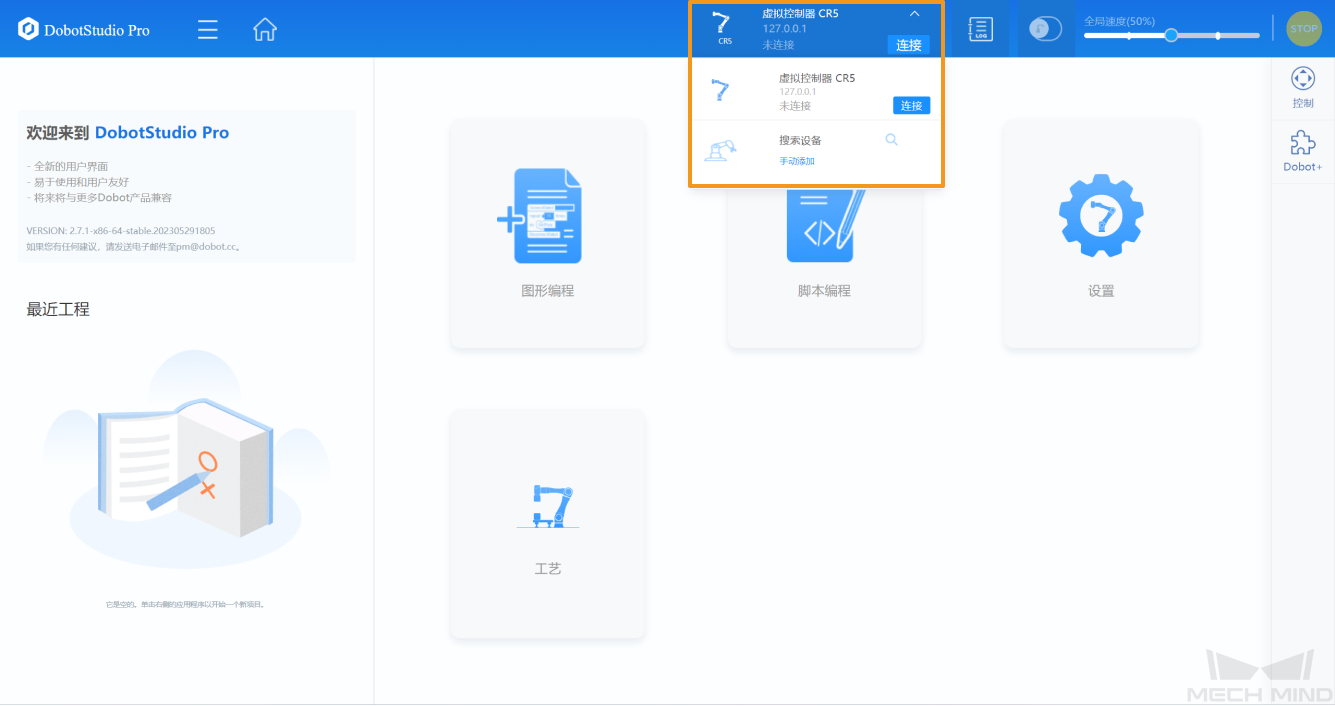
打开已安装的DobotStudio Pro软件,在下图所示区域,按软件提示操作连接机器人。
-
在软件上方工具栏点击
 图标,选择设置。
图标,选择设置。
-
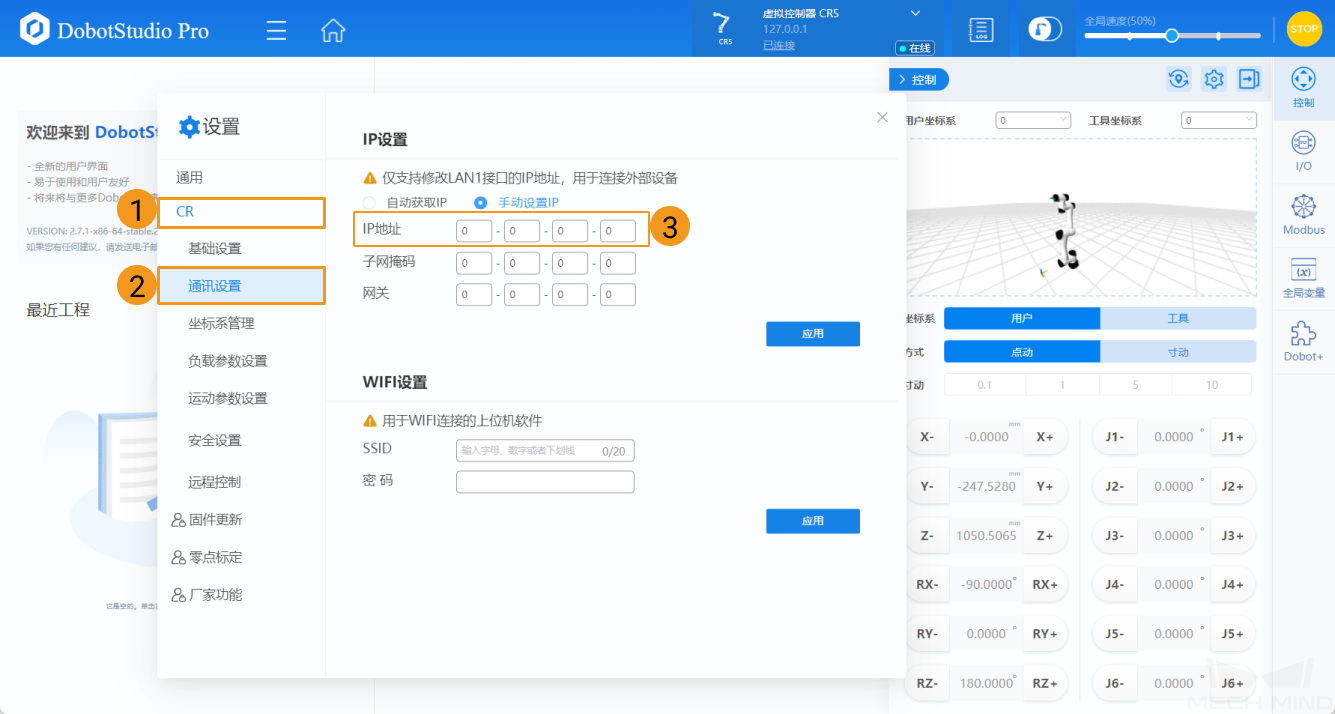
在设置页面左侧导航栏,点击。在基础设置页签下设备规格区域,查看控制器版本。

烧录文件到机器人中
-
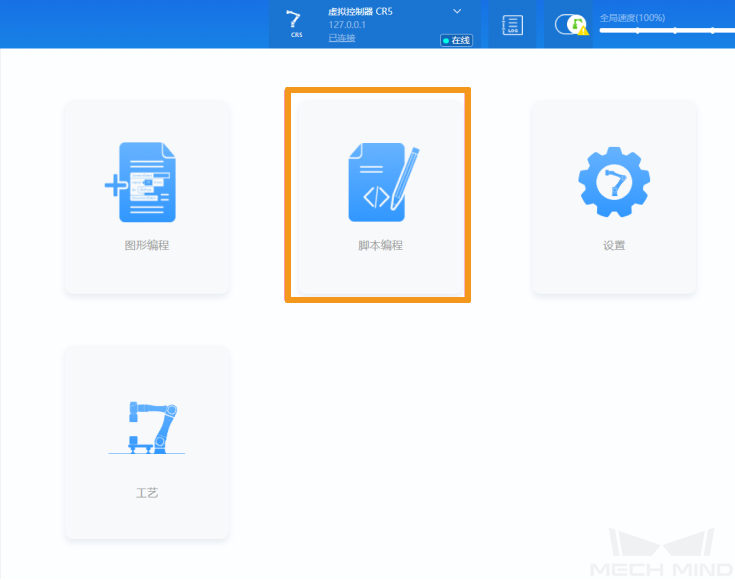
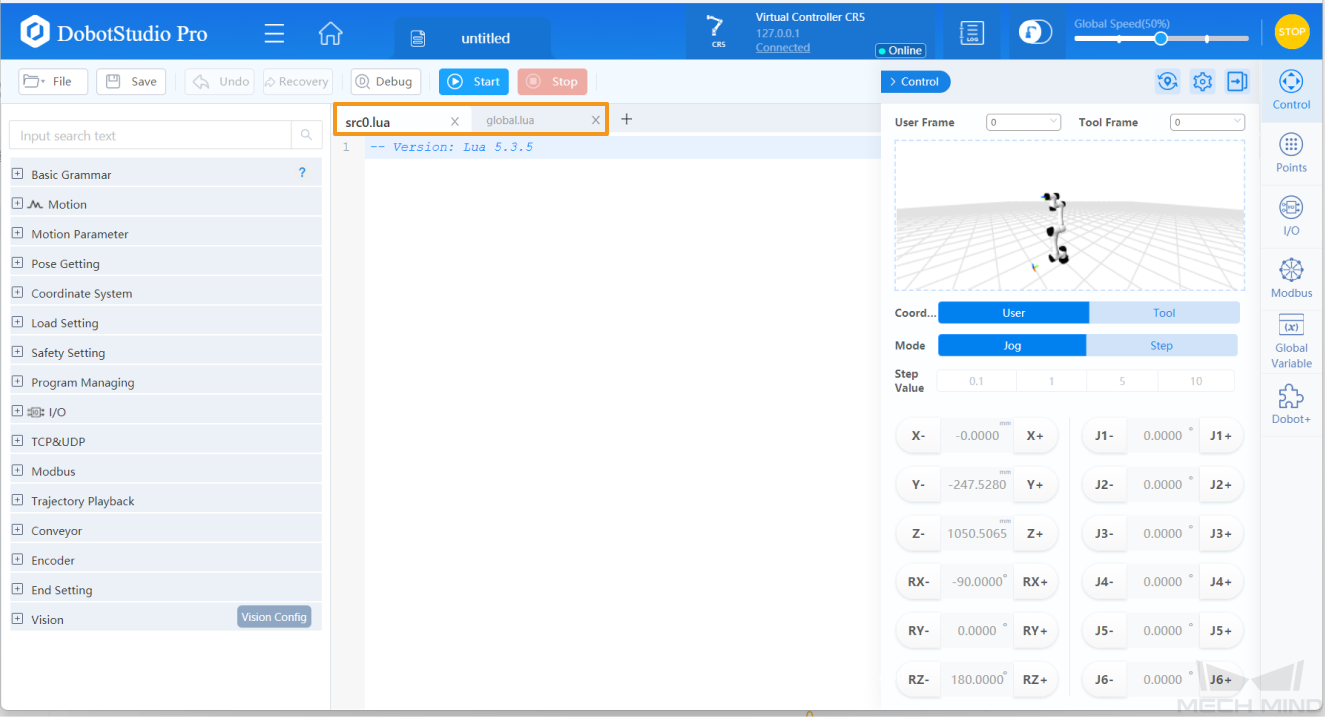
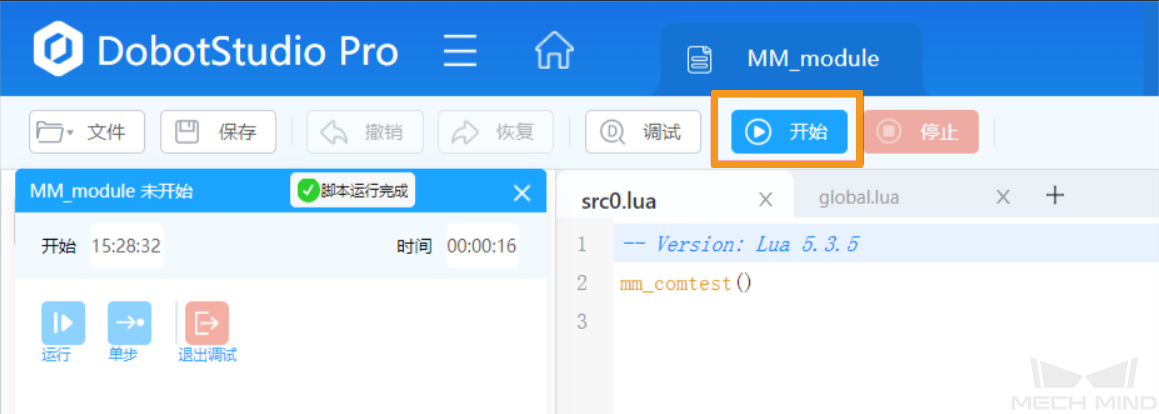
在DobotStudio Pro软件主界面,点击脚本编程,新建一个脚本编程工程。新建的脚本编程工程中包含两个空白文件:src0.lua和global.lua,如下图所示。
进行本步骤前,请确保已使用DobotStudio Pro软件连接机器人。连接机器人步骤请参见本文查看控制器版本区域步骤1。 -
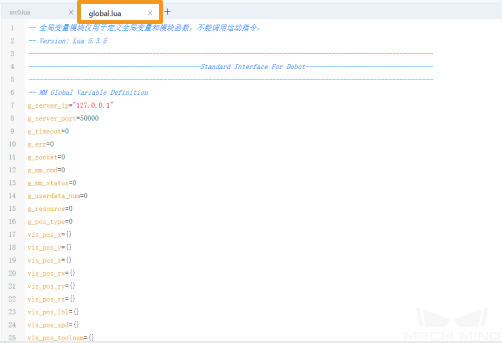
使用文本编辑器,打开Mech-Vision&Mech-Viz安装目录下的Mech-Center\Robot_Interface\DOBOT\CR\global.lua文件,然后将文件中所有内容复制至脚本编程工程中的同名文件global.lua内。
设置“机器人通信配置”
-
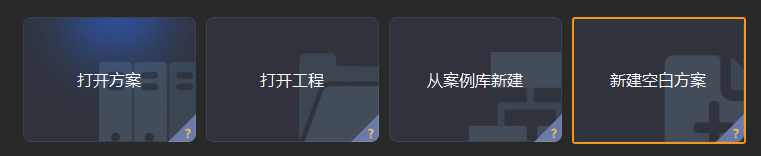
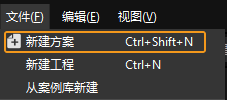
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
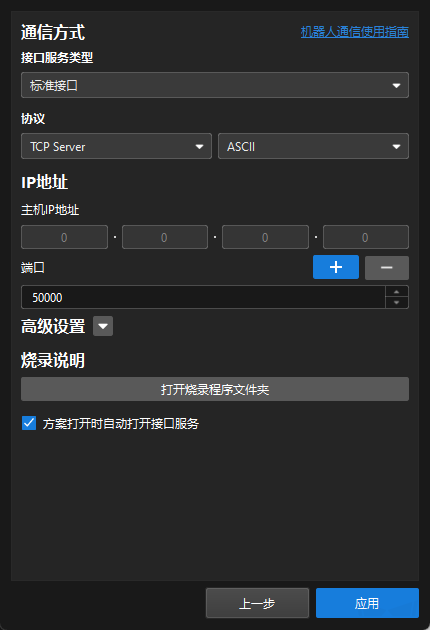
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 ASCII。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

测试标准接口通信
-
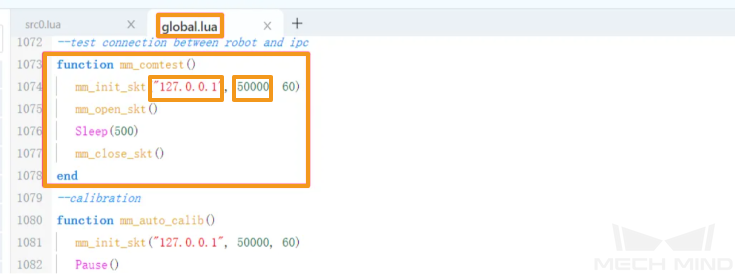
返回DobotStudio Pro软件的脚本编程界面,在gobal.lua文件中,找到mm_comtest函数,将其中的mm_init_skt函数参数中的IP地址及端口号改为工控机IP地址和端口号。
-
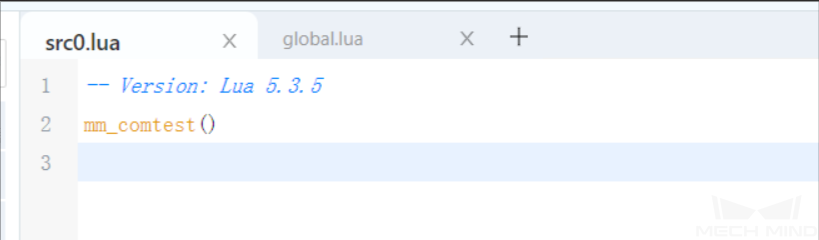
打开src0.lua文件,并在此文件内调用mm_comtest函数。
-
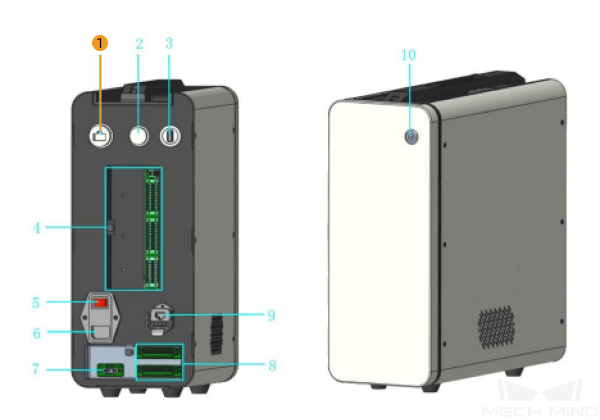
点击下图界面按钮,操作机器人使能上电。
-
按下界面上的开始,运行当前的程序。
-
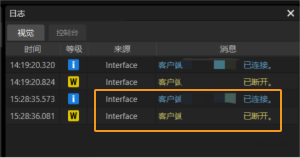
如果Mech-Vision显示如下内容,则表示可以正常建立连接。