FANUC(发那科)标准接口通信配置
本节介绍如何配置 FANUC 标准接口通信。
检查硬件及软件版本
-
FANUC 机器人: 6 轴或 7 轴机器人
-
FANUC 机器人系统版本: V8.* 或 V9.* 版本。
-
FANUC 机器人所需软件包:
R651 或 R632 (karel)
R648 (User Socket Msg)



设置 Mech-Vision 中“机器人与通信配置”
-
单击 Mech-Vision 工具栏中 机器人与接口配置 。
-
单击 选择机器人 下拉框,选择 品牌机器人 ,然后单击 选择机器人型号 ,选择具体 FANUC 机器人型号,单击 下一步 。
-
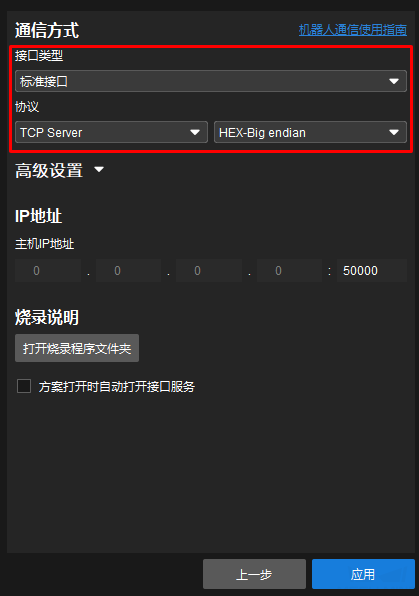
在 通信方式 下,接口类型选择 标准接口 ,协议选择 TCP Server ,协议格式选择 HEX-Big endian ,最后单击 应用 。
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人中
备份机器人文件
-
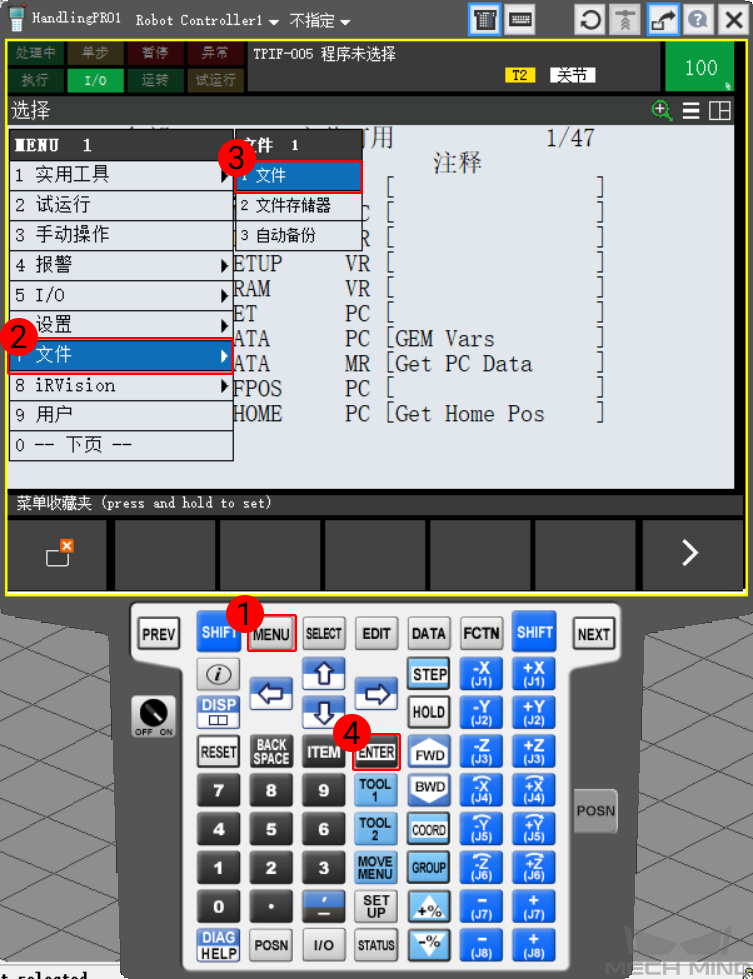
插入 U 盘,依次单击进入文件界面。
U 盘可插入控制柜或示教器中,请根据实际情况选择。 -
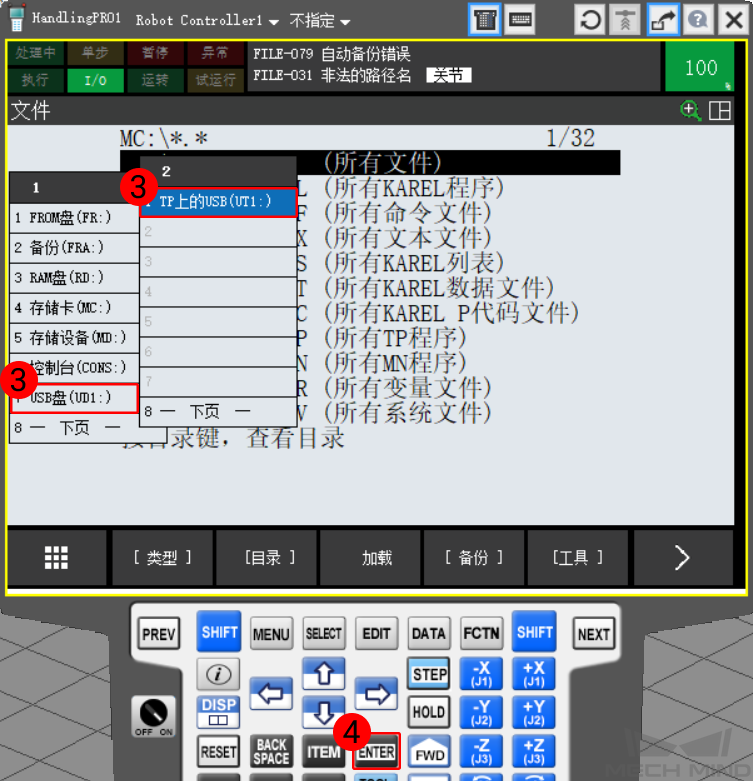
在文件界面,依次单击,选择 U 盘文件夹,单击
ENTER进入文件夹。如 U 盘插入控制柜,请选择 USB盘(UD1:) ;如 U 盘插入示教器,请选择 TP上的USB(UT1:) 。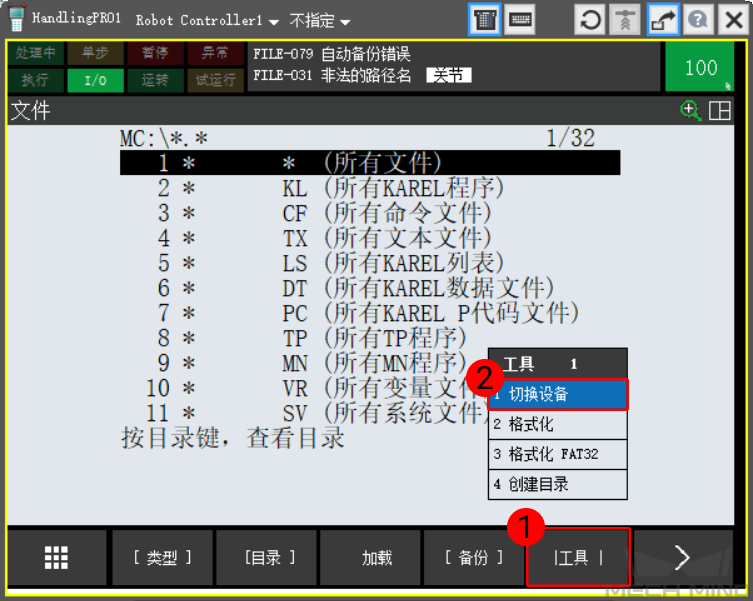
-
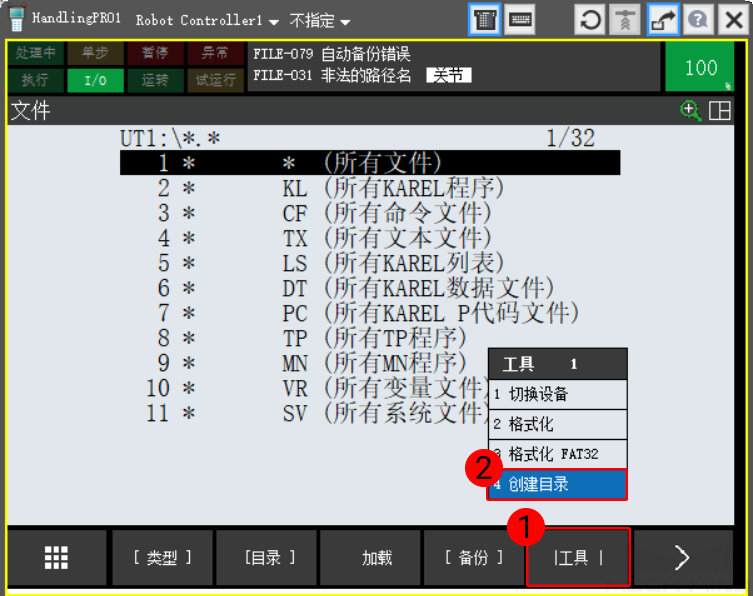
在 USB 文件夹界面,依次单击新建文件夹。
-
请根据需要选择 单词 、 大写 、 小写 或 其他/键盘 ,输入文件夹名称(以 AOA 为例),单击
ENTER确认,完成后进入该文件夹。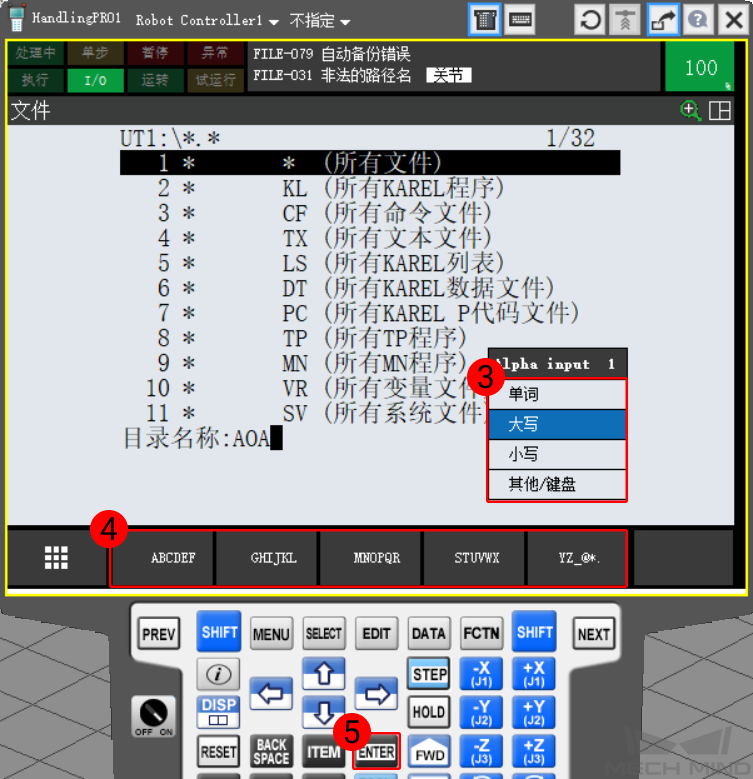
-
依次单击开始备份文件。

-
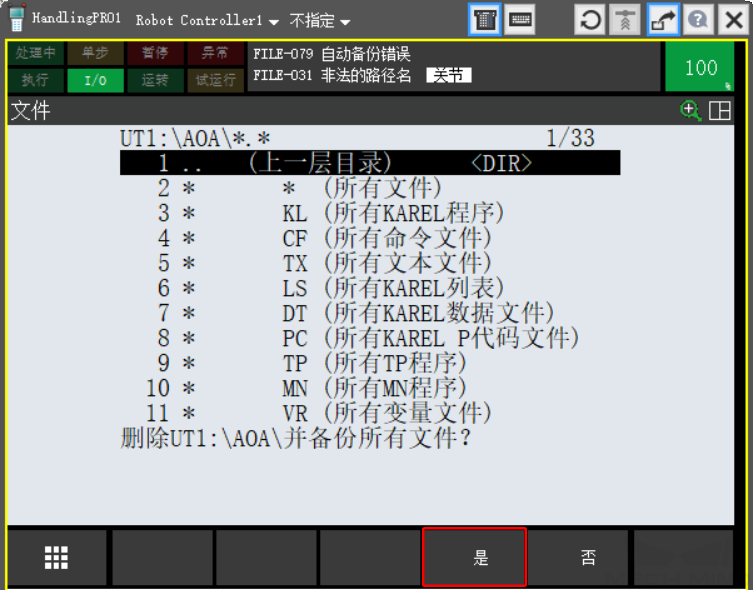
开始备份后出现删除提示,单击
是,删除新建文件夹的内容。确认后,出现备份文件提示,单击是,开始备份机器人文件。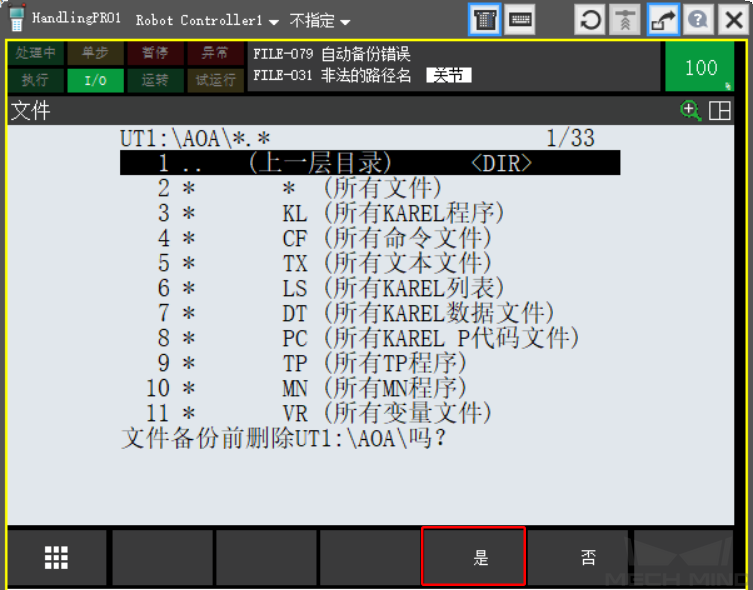
-
备份完成后,依次单击可查看已备份文件。

开始烧录
-
插入 U 盘,依次单击进入文件界面。

U 盘可插入控制柜或示教器中,请根据实际情况选择。 -
在文件界面,依次单击。

-
选择 USB 的安装文件夹。如 U 盘插入控制柜,请选择 USB盘(UD1:) ;如 U 盘插入示教器,请选择 TP上的USB(UT1:) 。

-
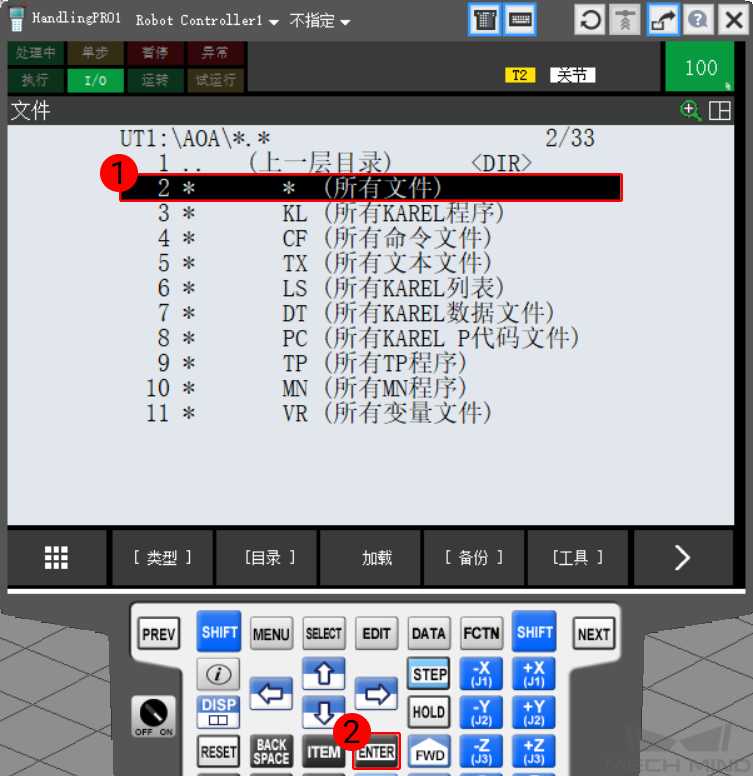
安装位置确认后,可查看 U 盘根目录文件。单击第一行 (所有文件) ,然后单击
ENTER。
-
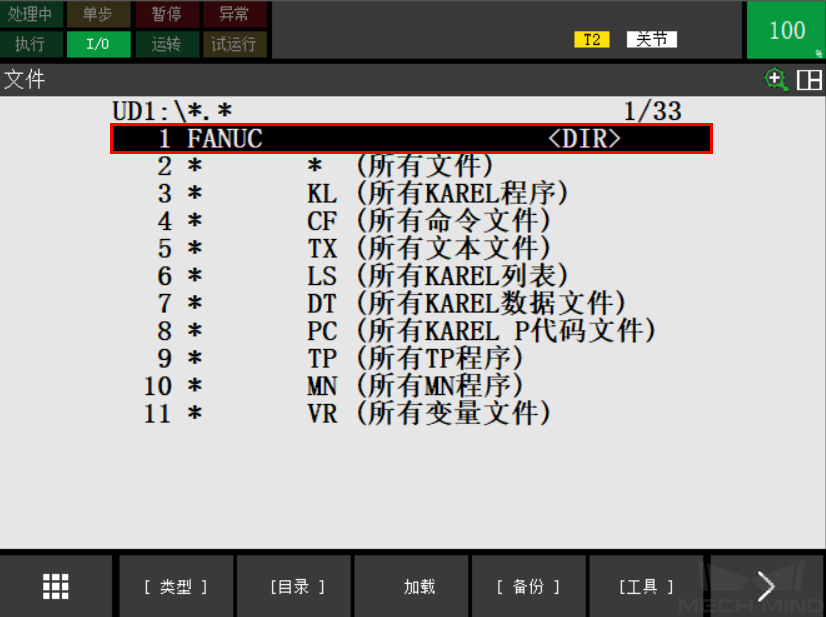
在 U 盘根目录文件下,点击 FANUC。
-
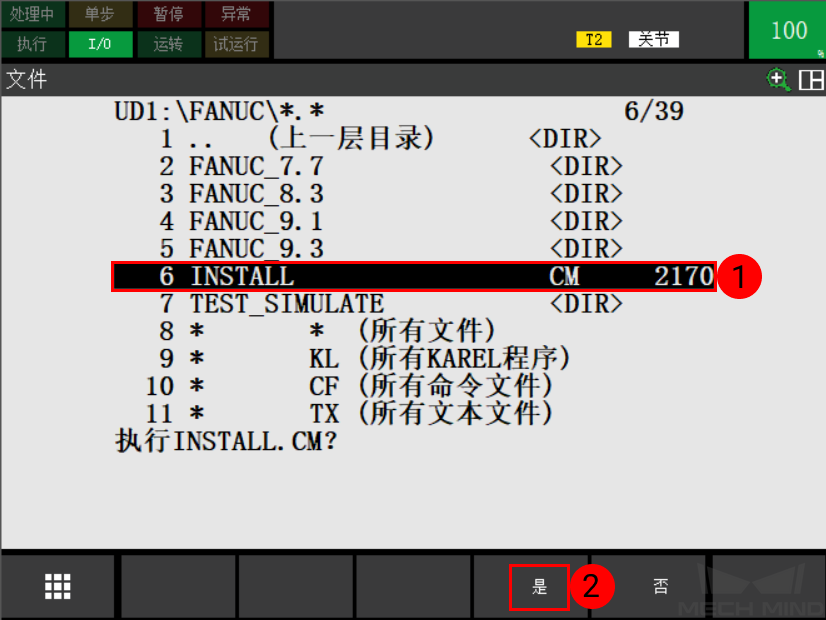
在 FANUC 目录下,点击 INSTALL,然后点击 是,便可开始执行烧录程序。
-
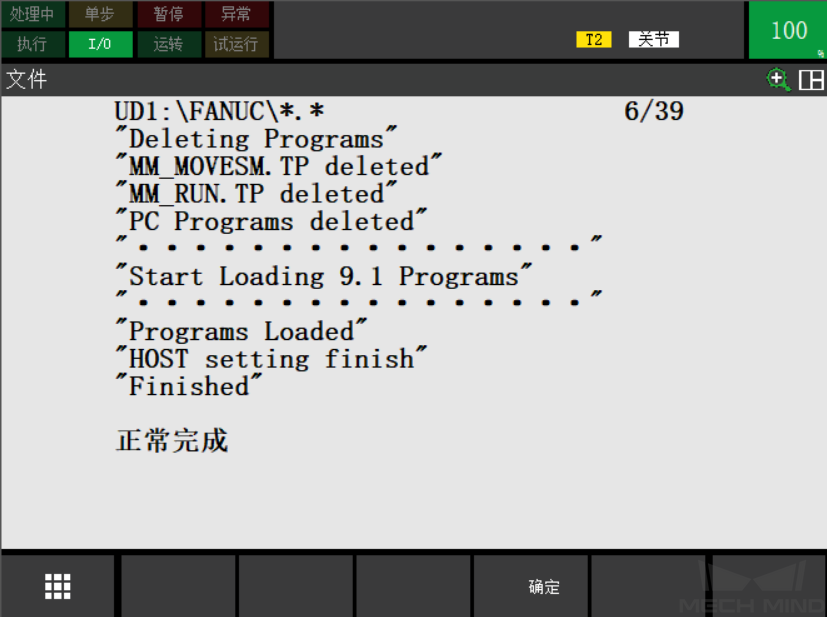
当出现如下信息(Programs Loaded)时,表示导入成功。单击 确定,退出程序。
烧录后的操作
-
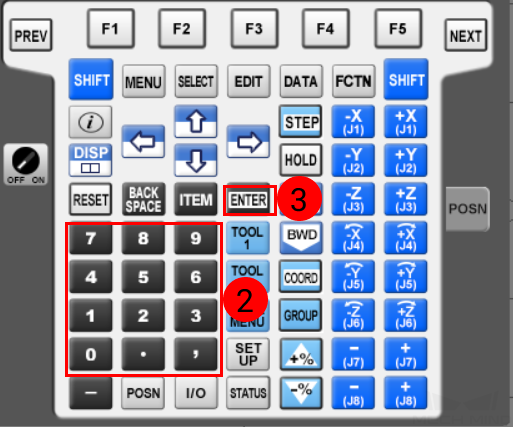
单击示教器上的
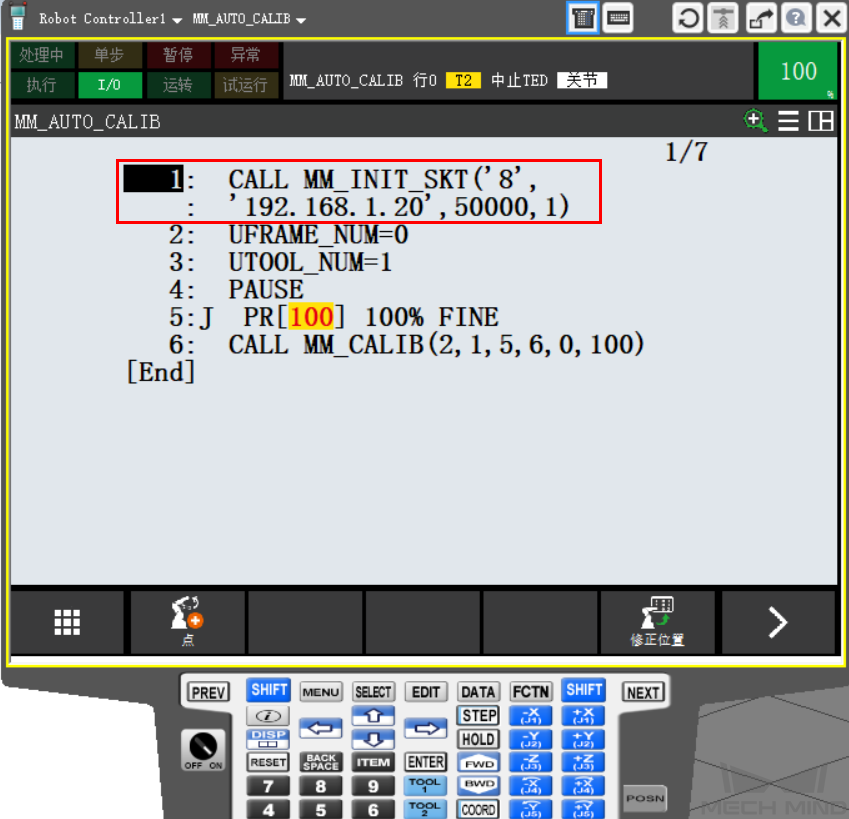
SELECT进入程序选择界面,移动光标至 MM_AUTO_CALIB ,单击ENTER进入程序。
-
在 MM_AUTO_CALIB 程序页面中设置 CALL MM_INIT_SKT 参数,该指令共有 4 个参数,根据实际情况设置。
-
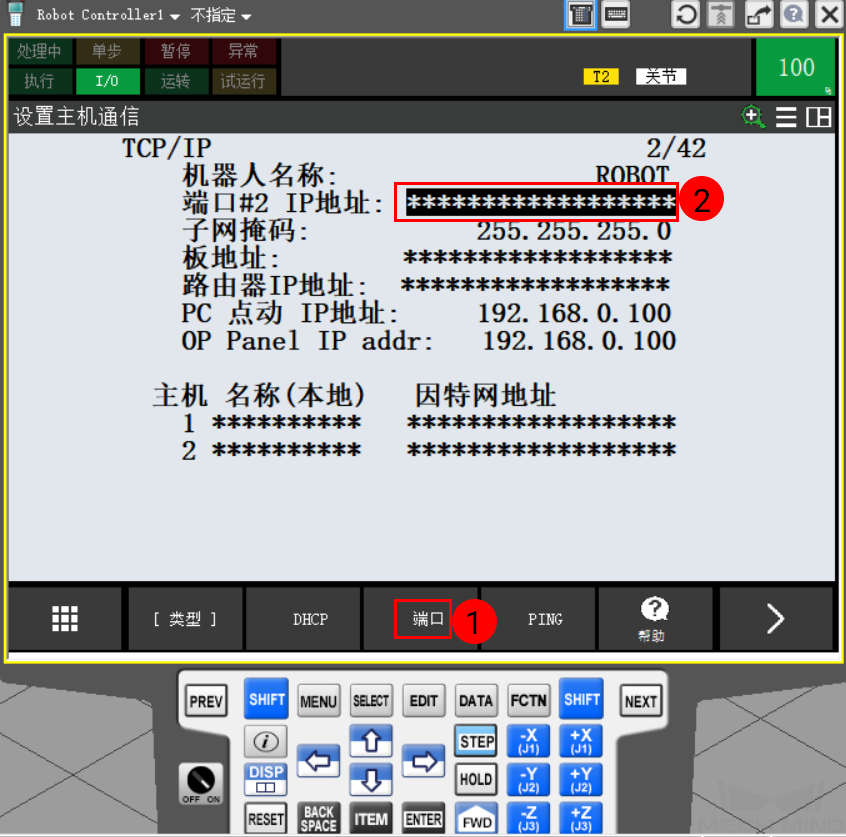
参数 1:客户端号(1~8)
-
参数 2:工控机IP地址
-
参数 3:工控机服务端口号
-
参数 4:超时等待时间(单位为 min)
-
-
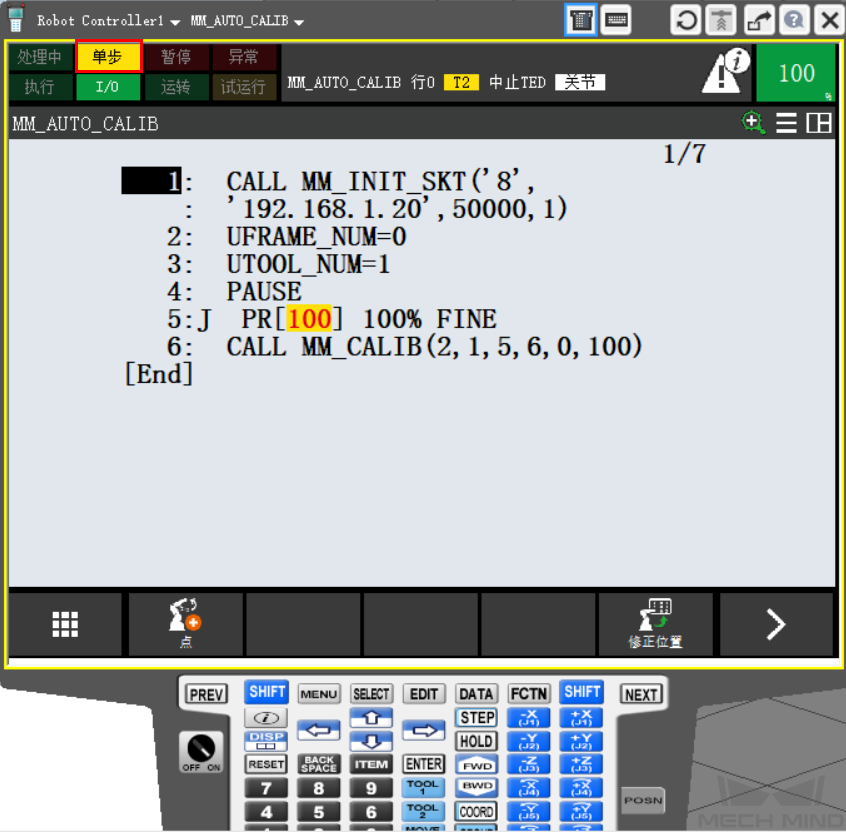
设置完成后,单击
STEP,机器人切换至单步运行模式,此时示教器显示屏上的 单步 变为黄色。
-
按下示教器背部的使能开关(任一均可)。

-
同时按住
SHIFT和FWD,开始运行首行指令 CALL MM_INIT_SKT 。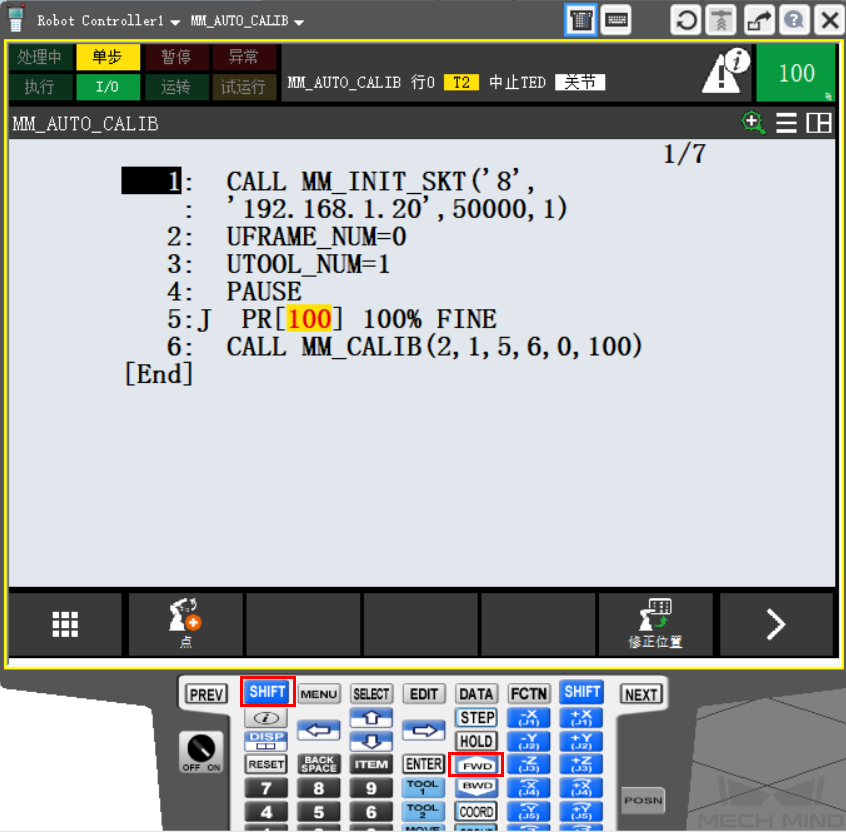
-
CALL MM_INIT_SKT 运行完成后,依次单击 MENU > 用户,进入用户界面。

-
用户界面出现如下信息时,烧录成功。此时重启机器人。
界面出现图中信息时,请务必重启机器人。 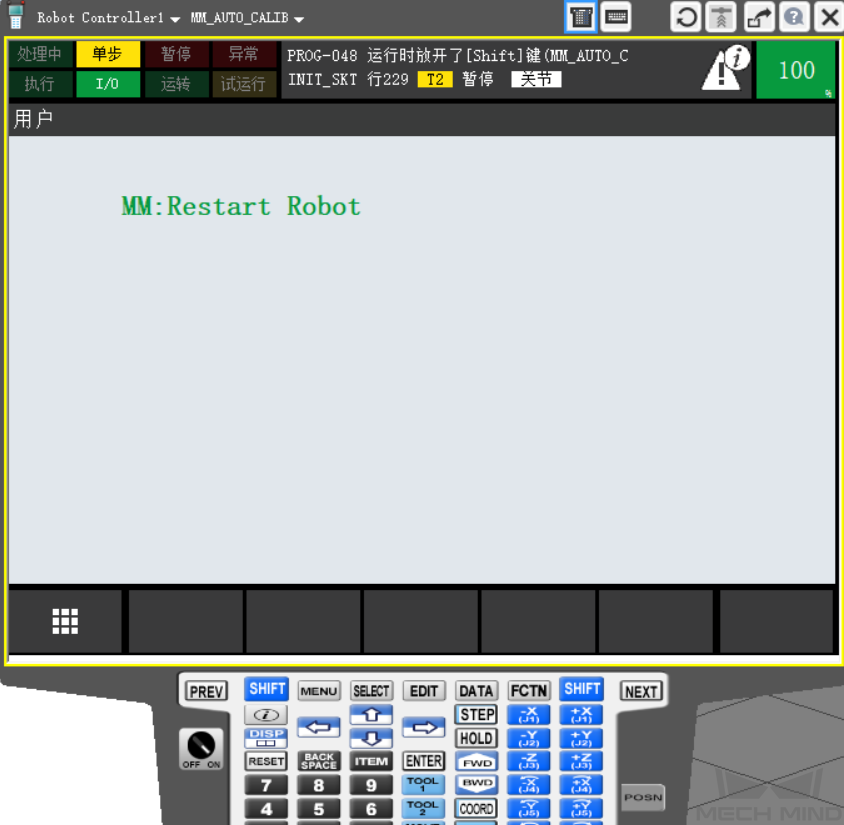
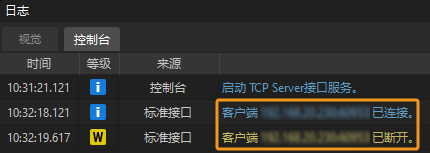
测试机器人连接状态
参考上文,手动单步运行机器人程序 MM_AUTO_CALIB 的首行指令 CALL MM_INIT_SKT 。若连接成功,则 Mech-Vision 日志窗口的 Console 标签页下会出现相关提示。