ティーチングによる把持位置姿勢を追加
把持位置姿勢 は、ロボットが把持できる対象物上の位置を表します。この位置姿勢は対象物の座標系にあり、その位置と方向は対象物に基づいています。ロボットが把持するために、Mech-Visionからの把持位置姿勢(把持時のロボットのツール位置姿勢)が必要です。この位置姿勢は、対象物の把持位置姿勢から変換されたものです。したがって、点群モデルに把持位置姿勢を追加してから、Mech-Visionがマッチング処理により対象物の把持位置姿勢を生成し、実際の把持位置姿勢を出力することができます。
|
最初に追加した把持位置姿勢は、デフォルトで幾何学的中心点に設定されます。以下は、幾何学的中心点についての説明です。
|
この方法で把持位置姿勢を追加する場合は、TCPを手動で入力する必要がありますので、事前にTCPデータをご用意ください。
|
Mech-Vizを使用する場合、 で現在使用しているロボットハンドのモデルをダブルクリックしてTCPを確認できます。 |
ティーチング方法による把持位置姿勢を追加する手順は、カメラの取り付け方式によって異なります。以下では、ETHおよびEIHモードでの操作手順について説明します。
|
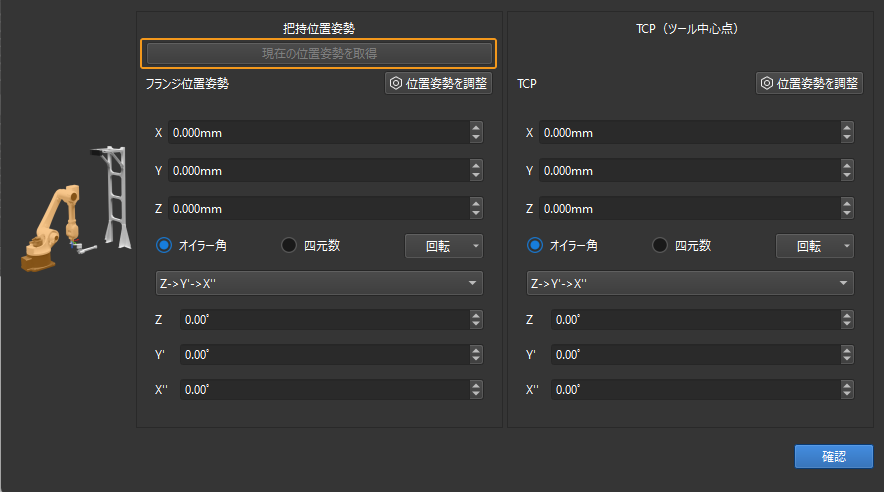
ETHモードでティーチング方法による把持位置姿勢を追加
-
ツールバーの
 をクリックし、「ティーチング方法による把持位置姿勢を追加」画面に入ります。
をクリックし、「ティーチング方法による把持位置姿勢を追加」画面に入ります。 -
TCPバーに、事前に準備されたTCPを入力します。

-
ティーチペンダントでロボットを把持位置姿勢に移動します。ロボットハンドを操作して把持を行い、把持精度を確認します。
治具を使用する場合は、把持位置姿勢の状態で治具を繰り返し開閉し、把持の安定性を確認します。
-
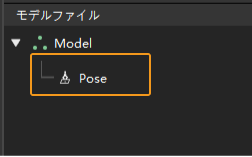
把持位置姿勢バーで、現在の位置姿勢を取得をクリックするか、ティーチペンダントに表示されている位置姿勢を手動で入力します。確認をクリックして、把持位置姿勢を生成します。新しく生成された把持位置姿勢トがモデルファイルリストに表示されます。
-
ロボットをカメラの視野外に移動します。位置姿勢が変化しないように、対象物に触れないように注意してください。
-
モデル点群を生成 を参照し、実際カメラを使用する場合の操作手順に従って対象物の点群モデルを生成します。
-
モデルファイルリストで手順4に生成された把持位置姿勢を選択し、この点群モデルにドラッグして、把持位置姿勢を点群モデルに追加します。追加された把持位置姿勢は点群モデルの下のレベルに表示されます。
モデルファイルの右側にある
 をクリックして
をクリックして  に変更し、すべての点群モデルをワンクリックで非表示にします。
に変更し、すべての点群モデルをワンクリックで非表示にします。
EIHモードでティーチング方法による把持位置姿勢を追加
EIHモードでは、把持位置姿勢を取得するだけでなく、画像撮影時のロボットの位置姿勢も取得する必要があります。
-
ツールバーの
をクリックし、「ティーチング方法による把持位置姿勢を追加」画面に入ります。 -
TCPバーに、事前に準備されたTCPを入力します。
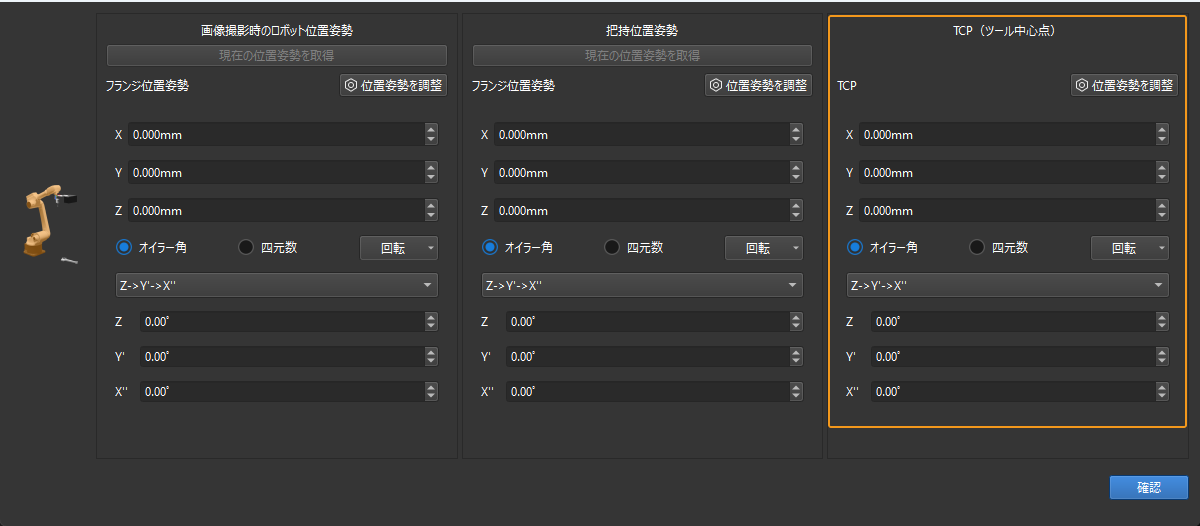
左手座標系を使用する直行ロボットの場合、画像撮影位置姿勢、把持位置姿勢、TCPを入力する際に、まずY軸の値を反転させる必要があります。
-
ティーチペンダントでロボットを把持位置姿勢に移動します。ロボットハンドを操作して把持を行い、把持精度を確認します。
治具を使用する場合は、把持位置姿勢の状態で治具を繰り返し開閉し、把持の安定性を確認します。
-
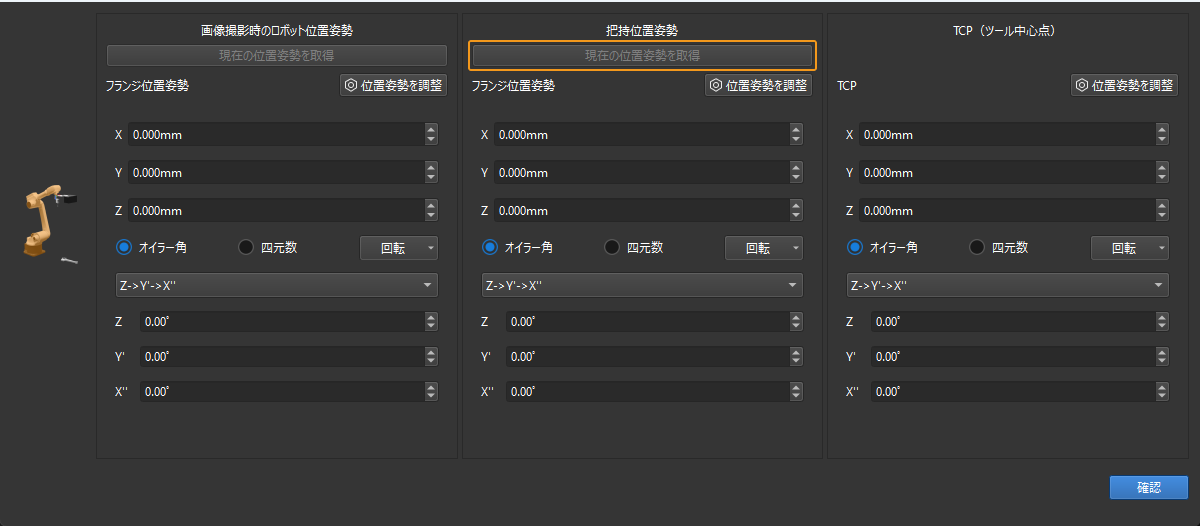
把持位置姿勢バーで、現在の位置姿勢を取得をクリックするか、ティーチペンダントに表示されている位置姿勢を手動で入力します。
-
ロボットをカメラの視野外に移動します。位置姿勢が変化しないように、対象物に触れないように注意してください。
-
ティーチペンダントでロボットを撮影時の位置姿勢に移動します。画像をキャプチャして画像撮影時のロボットの位置姿勢が正しいかどうかを確認します。
-
画像撮影時のロボット位置姿勢バーで、現在の位置姿勢を取得をクリックするか、ティーチペンダントに表示されている位置姿勢を手動で入力します。確認をクリックして、把持位置姿勢を生成します。新しく生成された把持位置姿勢トがモデルファイルリストに表示されます。

-
モデル点群を生成 を参照し、実際カメラを使用する場合の操作手順に従って対象物の点群モデルを生成します。
-
モデルファイルリストでステップ7に生成された把持位置姿勢を選択し、この点群モデルにドラッグして、把持位置姿勢を点群モデルに追加します。追加された把持位置姿勢は点群モデルの下のレベルに表示されます。
設定後、 (またはショートカットCtrl+Sを押す)をクリックすれば、点群モデルと把持位置姿勢はプロジェクトフォルダ/resource/3d_matchingのパスに保存されます。
|
|
ツールウィンドウを閉じると、ファイルが保存されているかどうかに関係なく、保存するかどうかを確認するポップアップ ウィンドウが表示されます。 |