データ処理
一、データの位置合わせ
異なるワークをスキャンする際、画像データにおけるワークの位置に微小な変動が生じる可能性があります。これによる影響を低減するため、画像にある共通の特徴を抽出して位置合わせします。こうすると、後続の測定の一貫性を確保できます。
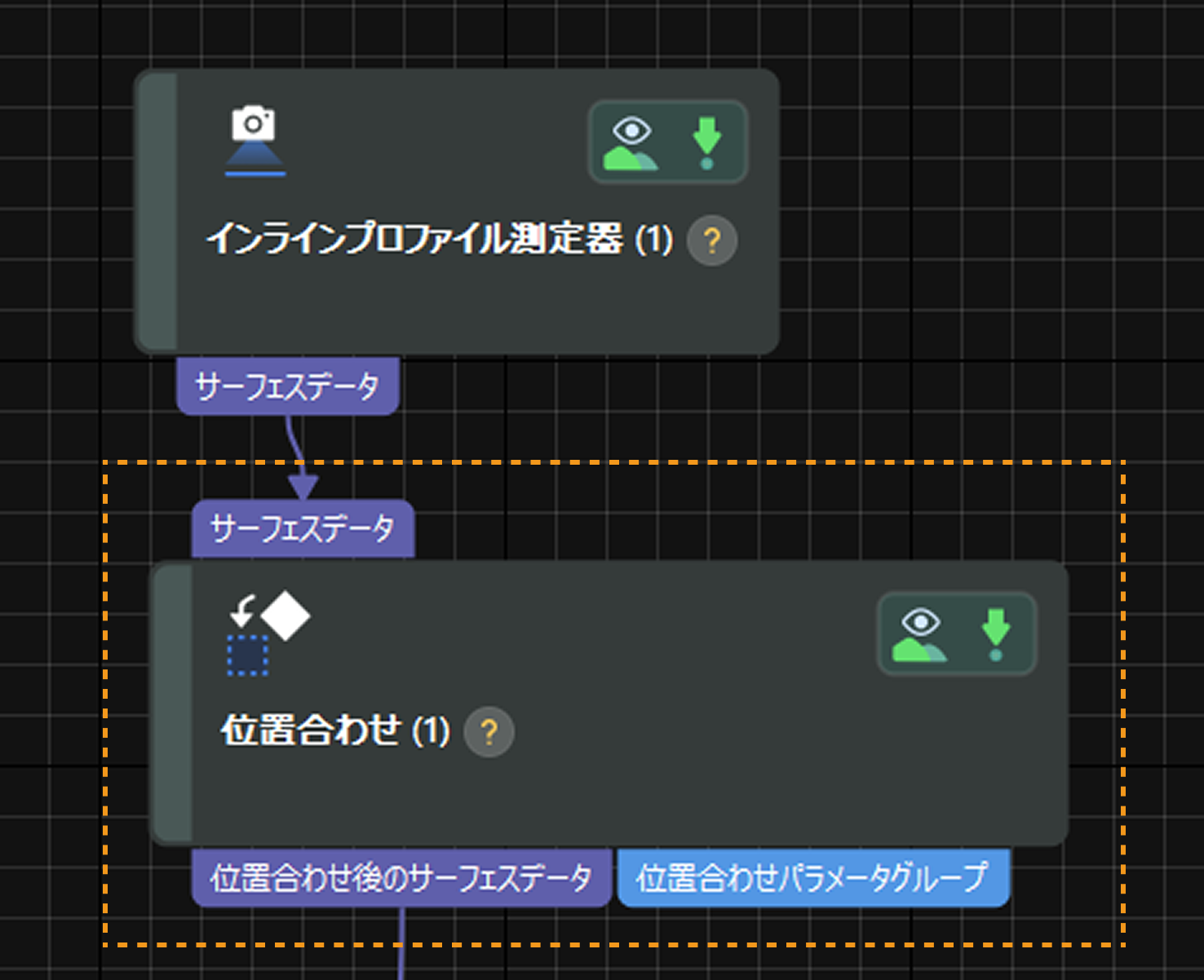
位置合わせ ステップの使用フローは以下の通りです。
-
マッチングモデルを作成:モデルを編集 ボタンをクリックして「2Dモデルエディタ」ウィンドウを開きます。画像から代表的かつ共通の特徴を選択してモデルを作成します。
詳しい説明は、2Dモデルエディタ をご参照ください。 -
ステップのパラメータを設定:モデルを選択してから、そのステップの パラメータ欄 でその他のパラメータを初期値のままにします。出力欄 の サーフェスデータ にチェックを入れます。
-
位置合わせ済みのデータを出力:ステップを実行すると、位置合わせ済みのデータが出力されます。
- デバッグ経験
-
-
2Dマッチングモデルは、画像の位置合わせに非常に重要です。モデルを作成する時、点群の品質が安定的、特徴の類似性が低く、画像の X/Y 方向を制限可能なエッジを特徴として選択してください。
-
タクトタイムを向上するために、2Dモデルエディタウィンドウの右側にある「特徴パラメータ」を設定し、角度とスケールの範囲を適切に縮小することを推奨します。例えば、ワークの供給角度の偏差が 5°以内にある場合、「角度範囲」を -5°から 5°に設定します。これでマッチングの速度が向上します。より詳しいパラメータ説明については、特徴パラメータ説明 をご参照ください。
-
特徴の選択が難しい時、画像の右側にある 深度範囲設定 スライダをドラッグしてエッジの特徴をより鮮明に表現してください。
-
二、ピン先端を水平に調整
画像にピンの先端の面が傾いている場合、ピンのサーフェスデータを選択し、深度データ(Z値)をデータフィルタリングに使用することができないことがあります。後続の手順で正確に測定できるように、ピンの先端の面を水平に調整します(XOY に平行する)。サーフェス変換 ステップを実行してデータの座標系を変換し、ピンの先端の面を水平に調整することができます。
実行についての詳細な説明
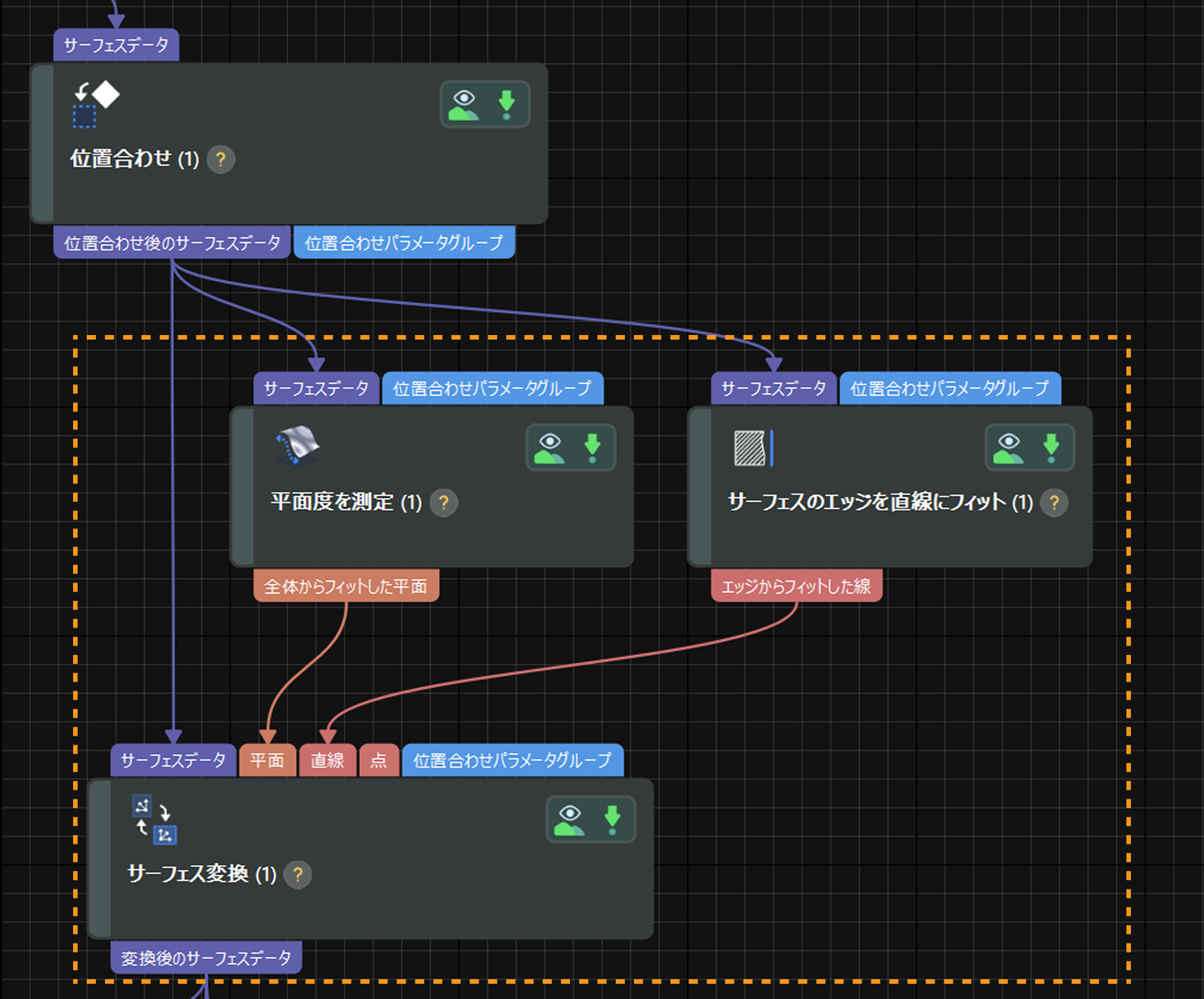
サーフェス変換 ステップで全てのサーフェスデータを新しい座標系に変換することができます。
ピンの周辺に平らな平面(ピンのベースなど)がり、その特徴を捕捉しやすいので、平面+直線を入力 の方式で座標系を変換します。
-
平面の特徴を抽出:平面度を測定 ステップを実行して平面の特徴を取得して、新しい座標系の XOY 平面とします。
-
直線の特徴を抽出:サーフェスのエッジを直線にフィット ステップを実行して直線の特徴を取得して、その直線を入力した平面に投影します。投影した直線は、新しい座標系の X 軸として使用されます。
ノイズが多い場合に、「サーフェスのエッジを直線にフィット」ステップのパラメータ 外れ値の割合い を高くしてより正確に直線をフィルタリングします。 -
座標系変換:サーフェス変換 ステップを実行してピン先端の面を水平に調整します。
-
結果出力 パネルで
 または
または  をクリックしてデータの可視化を設定できます。データビューアでは設定内容によってデータを表示します。
をクリックしてデータの可視化を設定できます。データビューアでは設定内容によってデータを表示します。 -
サーフェス変換 ステップの実行速度は、Mech-Eye Viewerに設定した プロファイル数 によって変わります。プロファイル数が多い場合に、このステップにおける画像処理に時間がかかり、全体的なタクトに影響する可能性があります。
-
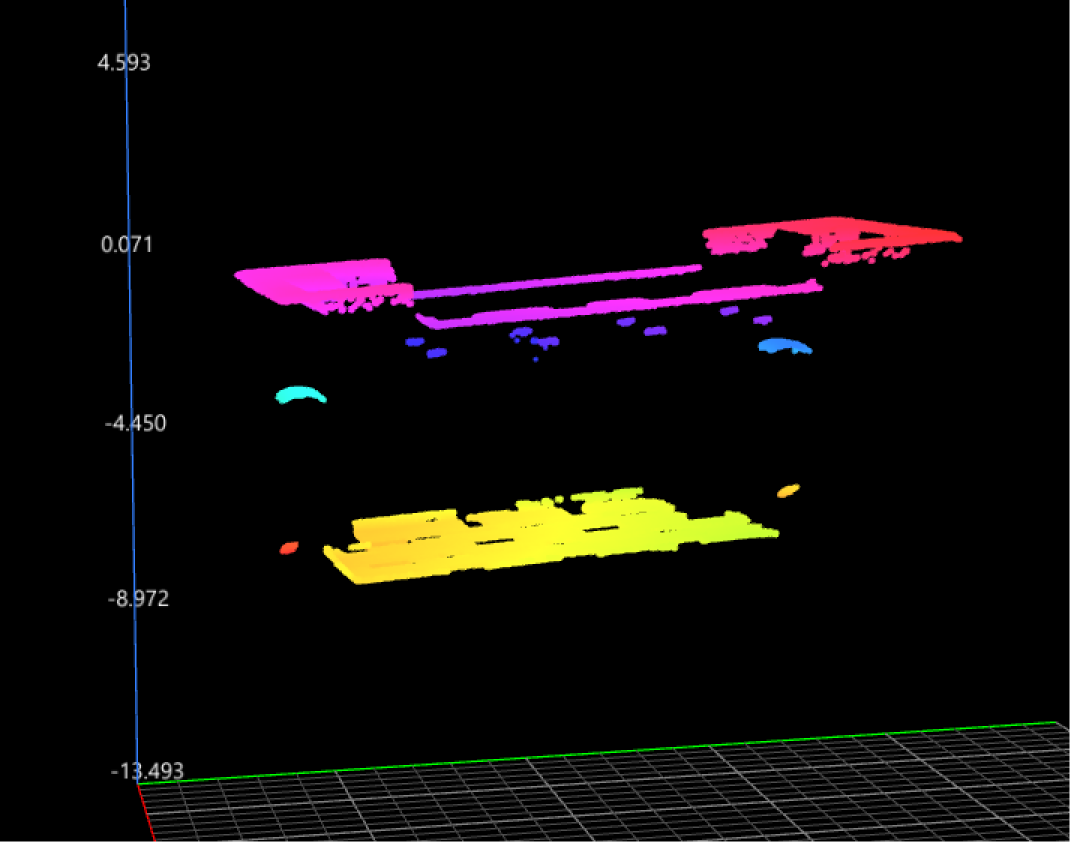
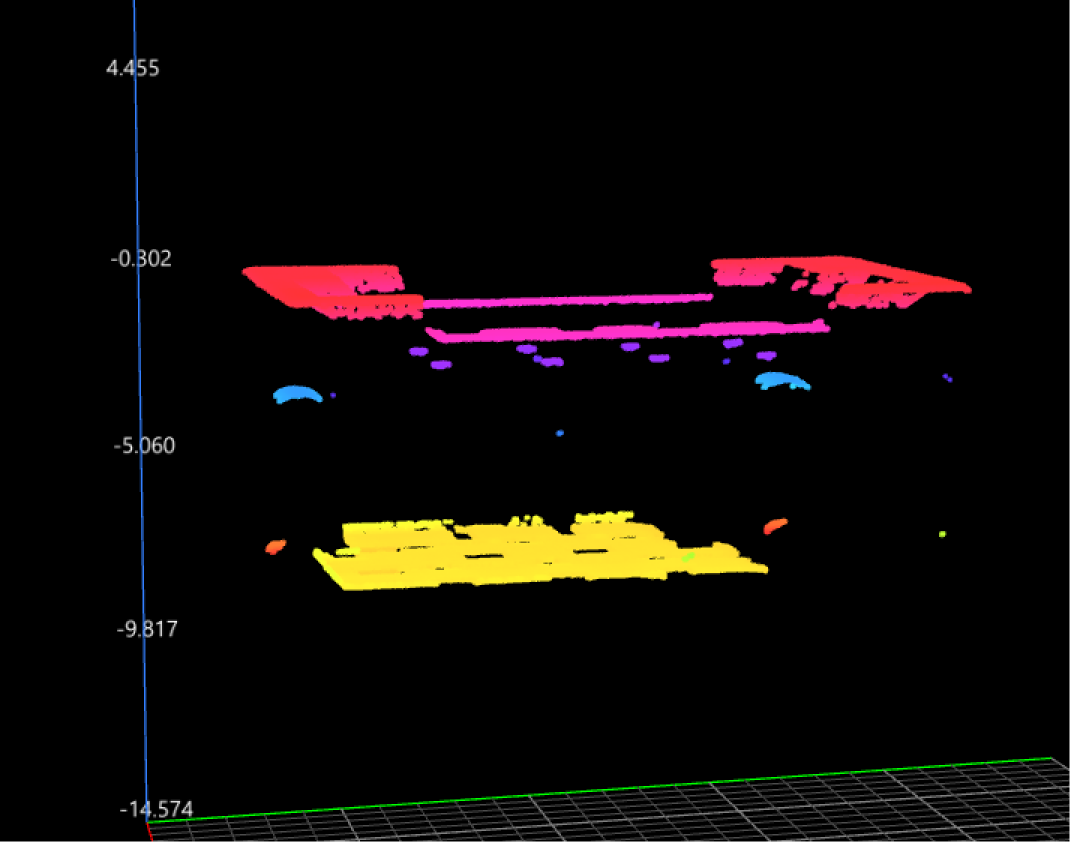
|
|
傾いているワーク |
変換後のデータ |
三、データの前処理
これまで取得したデータには、使用できないデータやノイズがある可能性があります。この場合、測定を行う前に、データ品質を改善するためにサーフェスのデータに対してフィルタリングやノイズ除去を実行します。
前処理の流れ:フィルタリング ➡ 大まかな位置決め ➡ 高精度位置決め + 再度フィルタリング
(一)フィルタリング
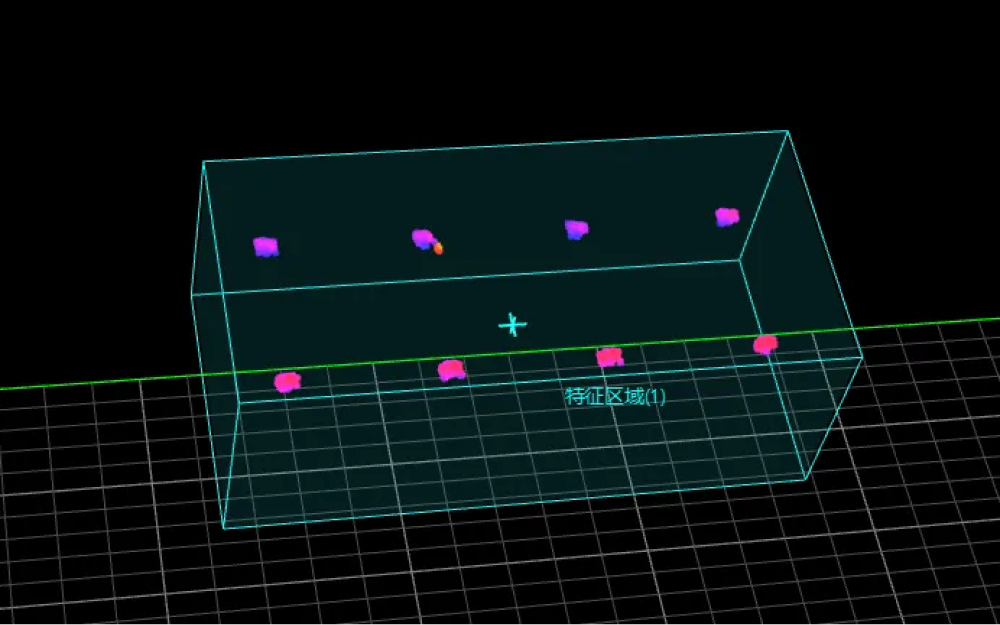
サーフェス点のフィルタリング(法線ベクトルによる) ステップを実行して変換後のデータからピンのデータを抽出して初歩的なノイズ除去を行います。
-
特徴領域を使用してピンのデータを指定します。

-
ステップパラメータを調整し、ノイズ除去を行います。
このステップを実行すると、フィルタリング処理したサーフェスデータが出力されます。
- デバッグ経験
-
-
サーフェス点のフィルタリング(法線ベクトルによる) ステップは効果的にノイズを除去できます。特に平坦なサーフェスデータを取得する場合は効果的です。傾いたノイズ、またはランダムに分散しているノイズに対しても効果的です。

-
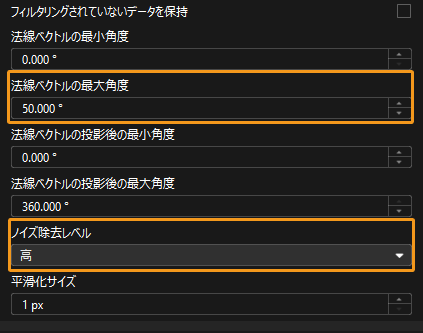
法線ベクトルの最大角度 パラメータを調整して(60°程度を推奨)傾いたノイズを除去し、ノイズ除去レベル を調整してランダムに分散しているノイズを除去します。この2つのパラメータを合わせて使用することを推奨します。より詳しいパラメータ説明については、角度フィルタリング関連パラメータ をご参照ください。
-
(二)大まかな位置決め
ブロブ解析 ステップを実行して、フィルタリングされたデータからピン先端の大まかな位置を認識します。
-
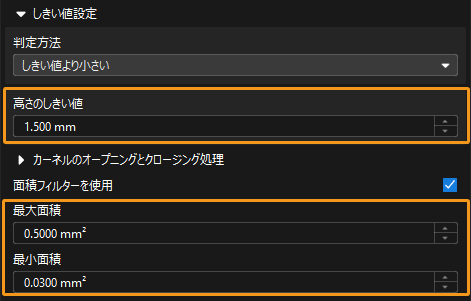
このステップのパラメータを調整して適切な高さと面積のしきい値を設定し、サーフェスデータからピン先端のデータ(複数のブロブ)を検出します。
-
ソート方法を指定し、検出したブロブに番号を付けます。これで各ブロブを精確に位置決めできます。
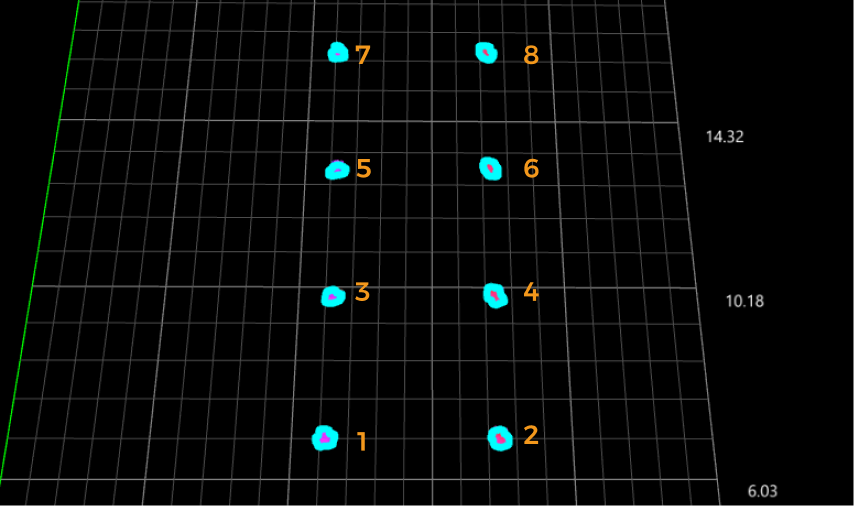
「行優先」でソート、ブロブ番号(インデックス)は参考用のみ
実際の状況に応じてソート方法を設定してください。 - デバッグ経験
-
-
ブロブ解析 は、ピン先端ごとに位置決めし、そのデータを出力するための重要なステップです。ほとんどの場合、適切な高さ・面積のしきい値を設定すれば高品質なピン先端データを取得できます。
-
ブロブ同士に接着が発生した時、初歩的なフィルタリングでこの課題を解決できます。
-
(三)高精度位置決め + 再度フィルタリング
ピン先端の面が平坦的でない場合に、データ範囲をさらに縮めて再度フィルタリングを行います。
-
サーフェスの特徴点の位置決め ステップを使用して大まかな位置決めの結果からピンの先端中心点を抽出します。
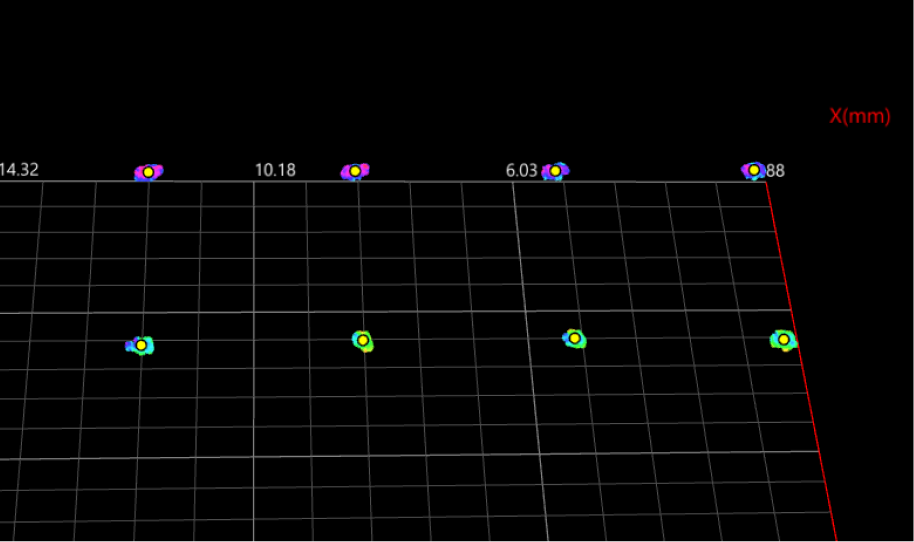
「特徴点のタイプ」を「平均値」に設定、ブロブごとに中心点(明るい黄色い点)を抽
-
位置合わせパラメータグループを抽出 ステップを実行して各中心点の座標を取得します。
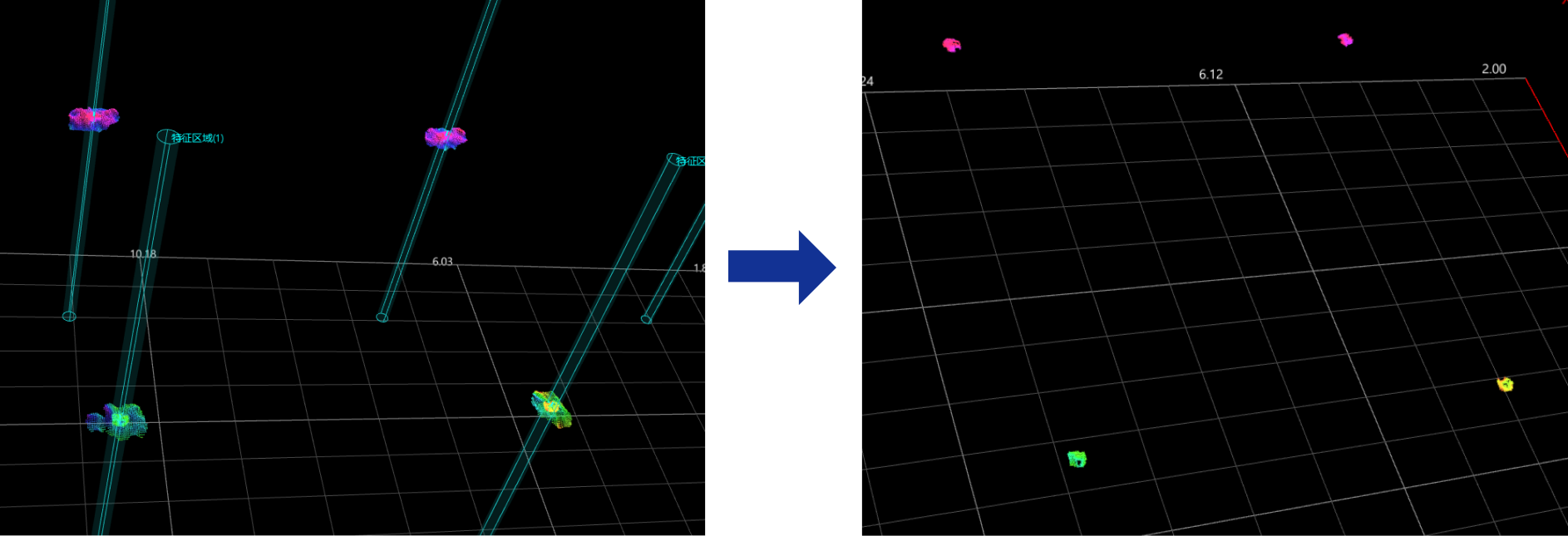
その後、データの範囲を縮めます。特徴領域を 1つだけ設定することで、その他の特徴領域を中心点の座標に基づいてピン先端のサーフェスデータに自動的に位置合わせされます。 -
それから、サーフェスの前処理 ステップを実行し、大まかな位置決めによって取得したピン先端データを取得してさらにデータの範囲を絞り込みます。
- デバッグ経験
-
-
ピンの測定では、高い精度が必要です。ピンの結像が安定的に行われない可能性がありますが、ピン先端のデータには、その中央の部分を安定的に結像することができるので、ピン先端データの中心点を小範囲な特徴領域の中心として使用し、データを確実に抽出することが可能です。
-
サーフェスの前処理 ステップで、フィルターを使用してデータをさらに処理してデータの安定性を改善します。
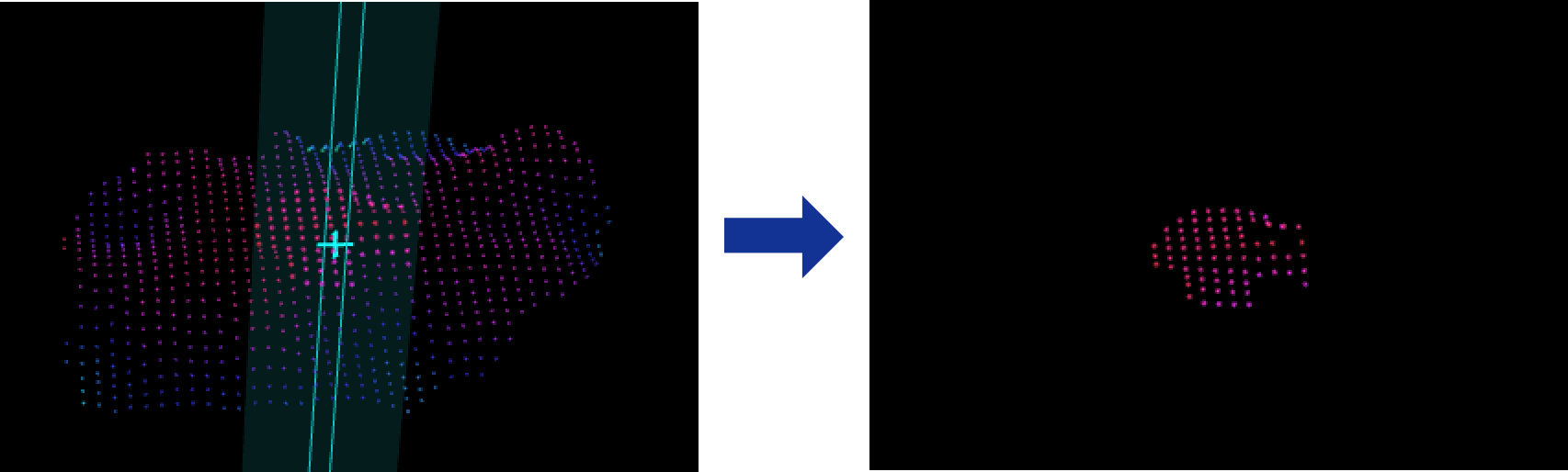
データの最高点と最低点を除去してデータの安定性をさらにアップ
-
これで、データ処理が完了しました。
続いて、ピンの高さと位置度を測定します。