JAKA抓取样例程序
本节介绍用于完成简单识别及移动机器人的样例程序。
样例程序介绍
机器人简单抓取和放置的样例程序已在 《JAKA标准接口通信配置》章节中导入 。
三个样例程序如下。
使用 Mech-Vision 进行视觉识别并获取结果
在 编程控制 界面,拖拽如下图所示的指令,或者打开 烧录 的 mm_vis_sample 程序。
程序说明
-
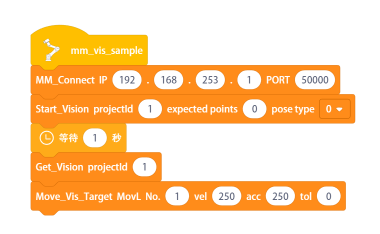
程序名称为 mm_vis_sample。
-
将机器人与工控机连接,用户需设置工控机的 IP 以及端口号,具体参见 MM_Connect 指令。
-
启动 Mech-Vision 工程,用户需设置 Mech-Vision 工程号,期望获取的位姿个数,以及机器人传给 Mech-Vision 的位姿类型,具体参见 Start_Vision 指令。
-
等待 1 s,防止机器人发生抖动从而影响拍照。
-
接收 Mech-Vision 工程输出的视觉结果,用户需设置 Mech-Vision 工程号,具体参见 Get_Vision 指令。
-
移动到 Mech-Vision 输出的视觉点,用户可设置移动至某个点,移动速度,移动加速度,以及终点误差,具体参见 Move_Vis_Target 指令。
使用 Mech-Viz 规划路径
在 编程控制 界面,拖拽如下图所示的指令,或者打开 烧录 的 mm_viz_sample 程序。
程序说明
-
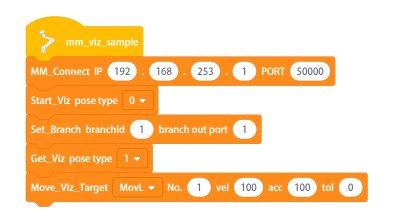
程序名称为 mm_viz_sample。
-
将机器人与工控机连接,用户需设置工控机的 IP 以及端口号,具体参见 MM_Connect 指令。
-
启动 Mech-Viz 工程,用户需设置机器人传入 Mech-Viz 的位姿类型,具体参见 Start_Viz 指令。
-
设置分支,用户需设置分支步骤名和出口号,具体参见 Set_Branch 指令。
-
接收 Mech-Viz 工程输出的数据,用户需设置返回路径点的形式,具体参见 Get_Viz 指令。
-
移动到 Mech-Viz 规划的路径点,用户可设置移动至某个点,移动速度,移动加速度,以及终点误差,具体参见 Move_Viz_Target 指令。
使用 Mech-Vision “路径规划”步骤获取规划路径
在 编程控制 界面,拖拽如下图所示的指令,或者打开 烧录 的 mm_vispath_sample 程序。
程序说明
-
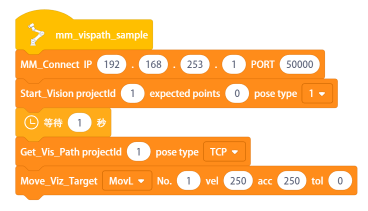
程序名称为 mm_vispath_sample。
-
将机器人与工控机连接,用户需设置工控机的 IP 以及端口号,具体参见 MM_Connect 指令。
-
启动 Mech-Vision 工程,用户需设置 Mech-Vision 工程号,期望获取的位姿个数,以及机器人传给 Mech-Vision 的位姿类型,具体参见 Start_Vision 指令。
-
等待 1 s,防止机器人发生抖动从而影响拍照。
-
接受 Mech-Vision 中“路径规划”步骤输出的规划路径,用户需设置 Mech-Vision 工程号,以及路径点的位姿类型,具体参见 Get_Vis_Path 指令。
-
移动到规划的路径点,用户可设置移动至某个点,移动速度,移动加速度,以及终点误差,具体参见 Move_Viz_Target 指令。