Kawasaki机器人基本操作
本章将介绍川崎机器人的基本操作。
设置 Home 点
-
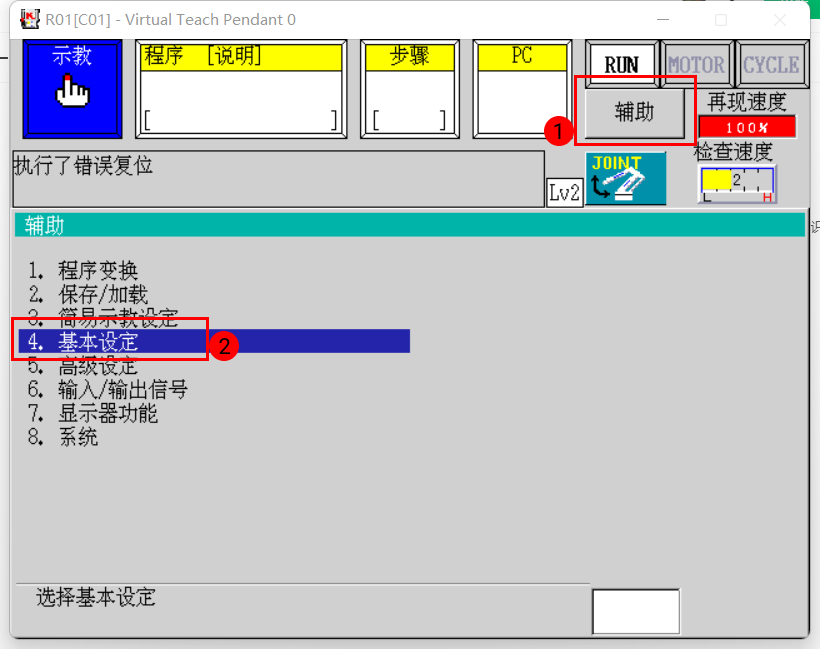
依次点击。
-
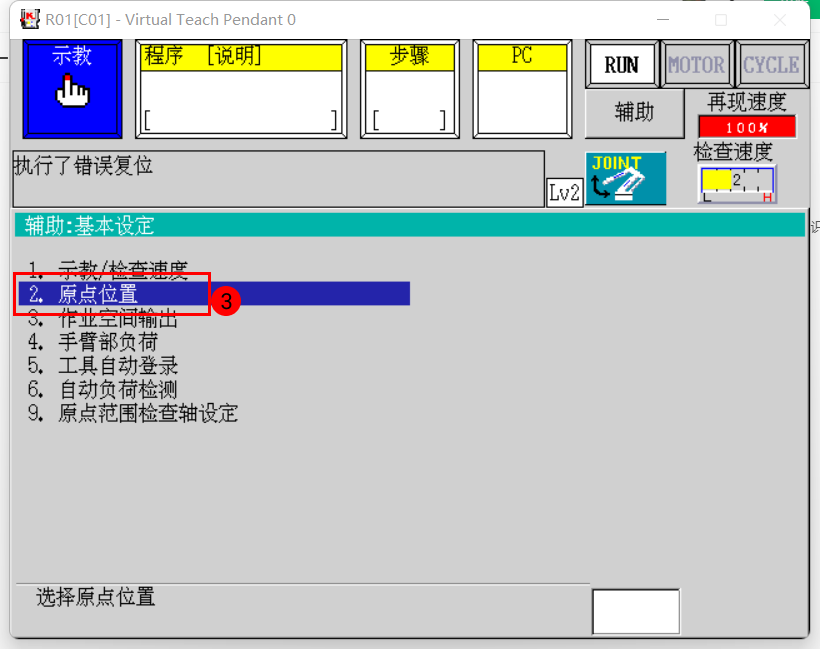
点击 2. 原点位置 。
-
勾选 位置输入 ,设置机器人 HOME 点处各关节角的角度,设定好之后按
登录键确认,底部会提示“设定完毕”。
此外,用户也可以手动移动真实机器人到示教 Home 位置,勾选 当前位置 ,之后按 登录 键确认。
设置机器人工具中心点
-
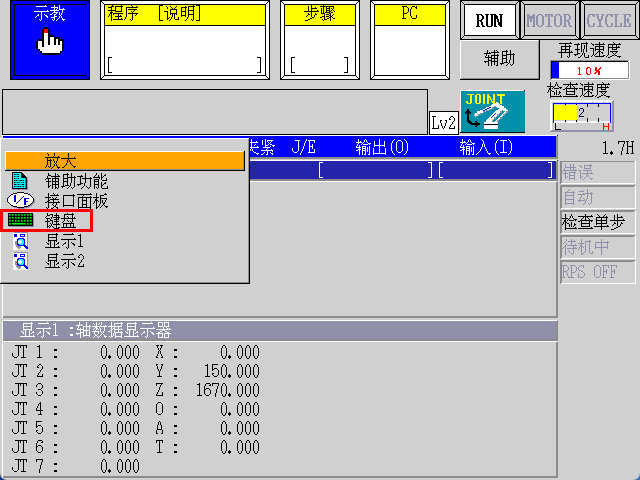
在示教模式下,点击中间空白区域。
-
在弹出的下拉列表选项中,点击 键盘 。
-
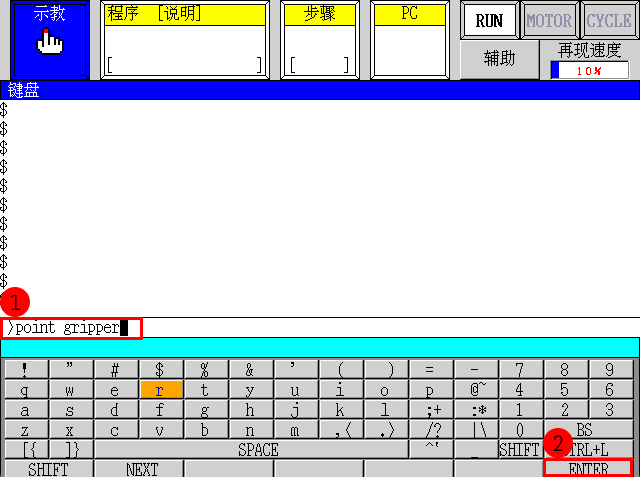
通过键盘输入 point gripper ,然后点击 ENTER 。
-
通过键盘输入工具中心点的位姿数据,例如,此处输入 0,0,200 ,然后点击 ENTER 。

-
再次点击 ENTER ,然后按
R键返回。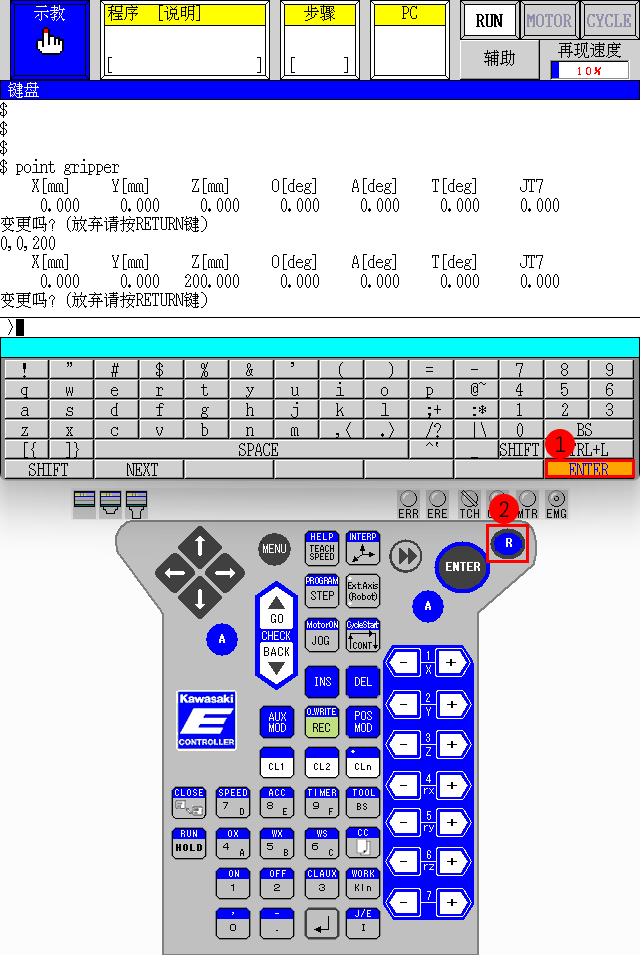
设置示教位姿数据
| 在执行以下操作前,用户已完成 烧录 步骤。 |
此处以 使用 Mech-Vision 进行视觉识别并获取结果 样例程序中第 31 行 lmove waypoint[1] 为例,讲解如何设置示教位姿数据。
-
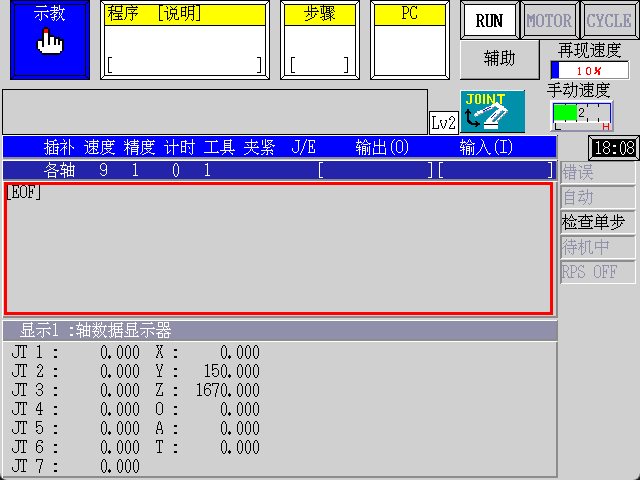
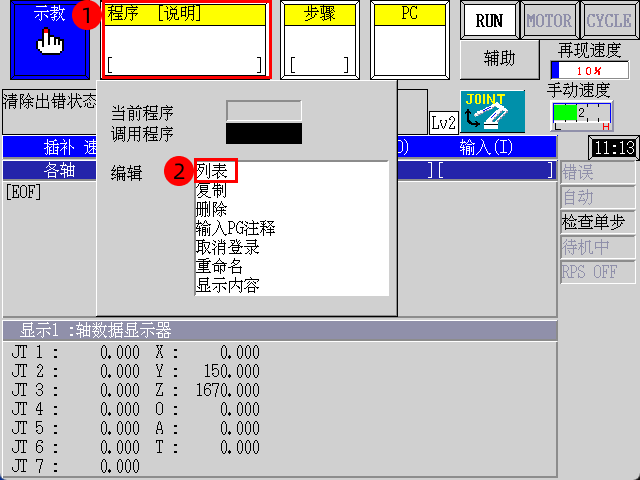
在示教模式下,点击 程序 窗口,然后点击 列表 。
-
在列表项中,通过 下一页 查找 vision_sample_1 并选中,按示教器上
登录键确认。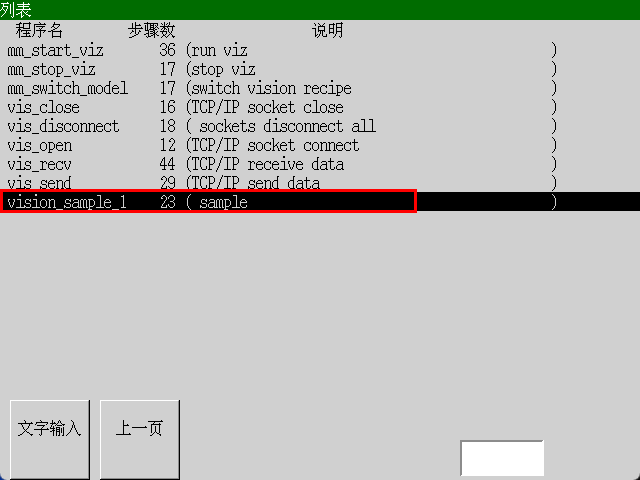
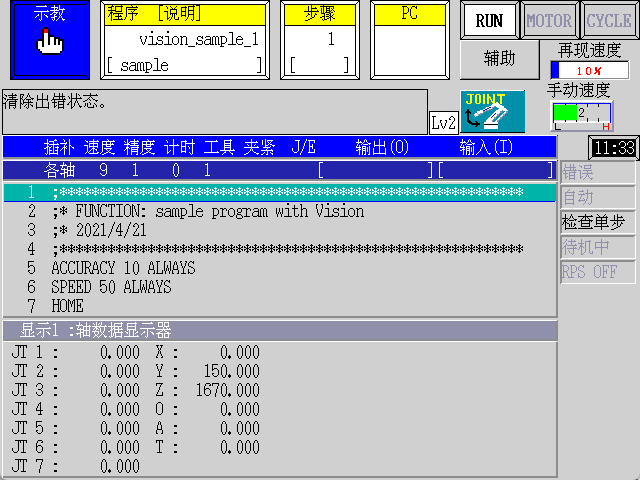
前台程序添加完成后如下图所示。
-
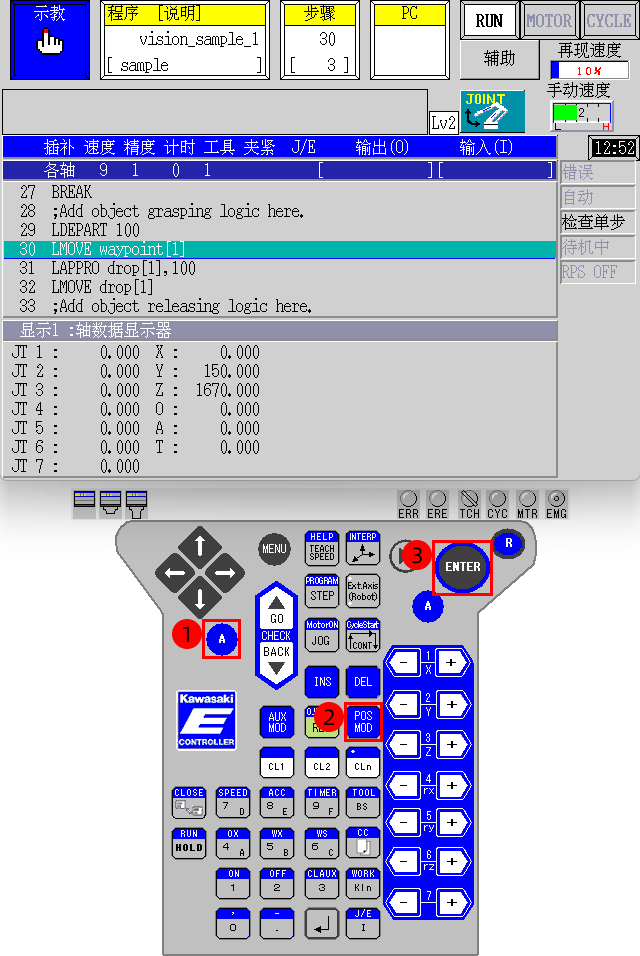
点击 步骤 ,在 调用步骤 处,通过键盘输入 30,按
登录键确认,使 30 行处于高亮显示状态。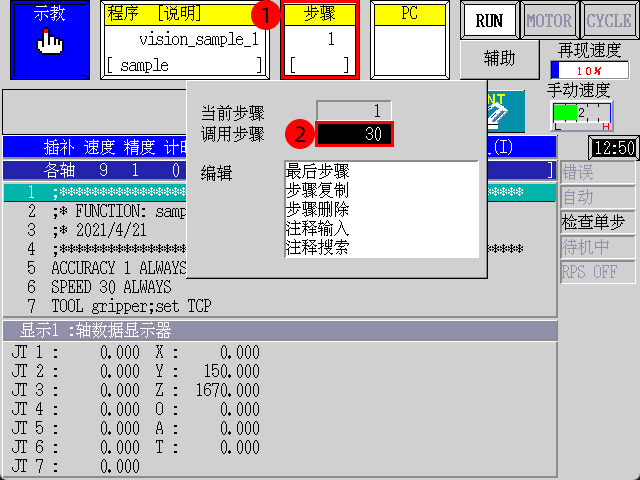
-
手动移动真实机器人到示教位置,按
A+POS MOD键后,按登录键确认,此时示教位置的位姿数据就是 waypoint[1] 的值。