主控程序说明
程序说明
主控程序由以下文件组成,其中,.src 为程序文件,.dat 为数据文件,.xml 为通信配置文件。
| 文件名 | 程序描述 |
|---|---|
mm_server.sub |
后台程序,用来接收 Robserver 数据,以及发送机器人位姿、信号及状态数据 |
mm_server.dat |
后台程序对应的 .dat 数据文件 |
motion_control.src |
前台程序,用于控制移动机器人 |
mainmodule.src |
主控程序前台主程序 |
mainmodule.dat |
主控程序前台主程序对应的 .dat 数据文件 |
mm_status.xml |
机器人状态通信配置文件 |
mm_motion.xml |
机器人动作通信配置文件 |
信号说明
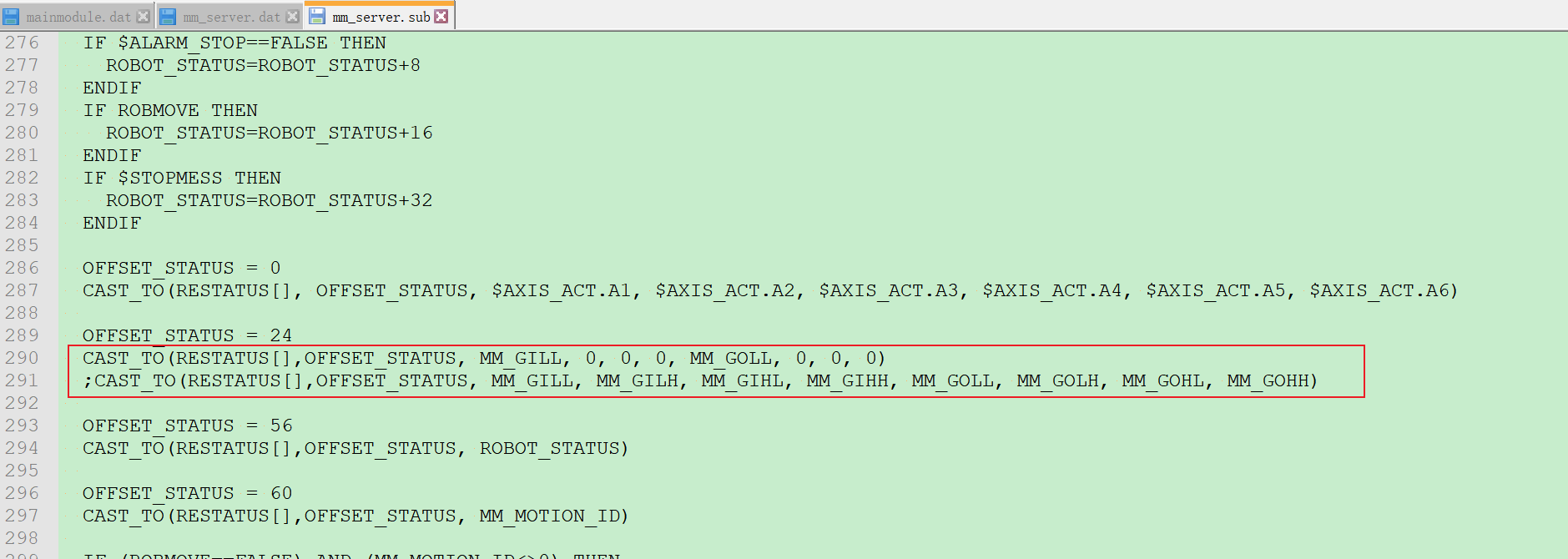
程序默认支持 16 个 DI 和 DO 信号,用户可通过修改程序扩展成 64 个信号。
修改方法:在 mm_server 文件中,第 290 行前添加分号(注释符号),第 291 行前去除分号。
信号附表
| 内部旗标名 | 注释 |
|---|---|
$FLAG[1] |
mm_motion 连接成功的旗标 |
$FLAG[2] |
mm_motion 接收到数据的旗标 |
$FLAG[5] |
mm_status 连接成功的旗标 |
$FLAG[6] |
mm_status 接收到数据的旗标 |
| 主控使用的 IO | 信号 |
|---|---|
输入(16个) |
$IN[1] -$IN[16] |
输出(16个) |
$OUT[1]-$OUT[16] |
输入(64个) |
$IN[1] -$IN[64] |
输出(64个) |
$OUT[1]-$OUT[64] |