在主控通信中,ABB机器人为什么会偶发提前开启或关闭DO/DI?
问题描述
在使用主控通信时,ABB机器人有时还未移动到目标点,就开启或关闭DO/DI。
问题原因
这可能是用户先按下示教器的停止按钮(此时前台程序停止,未复位),然后停止Mech-Viz工程(此时后台程序停止并复位)。这会导致前台程序未复位。当下次继续运行时,由于前台程序未清除上次发送的移动点位,从而导致移动混乱,因此请勿在前台程序停止的情况下发送指令。
解决方案
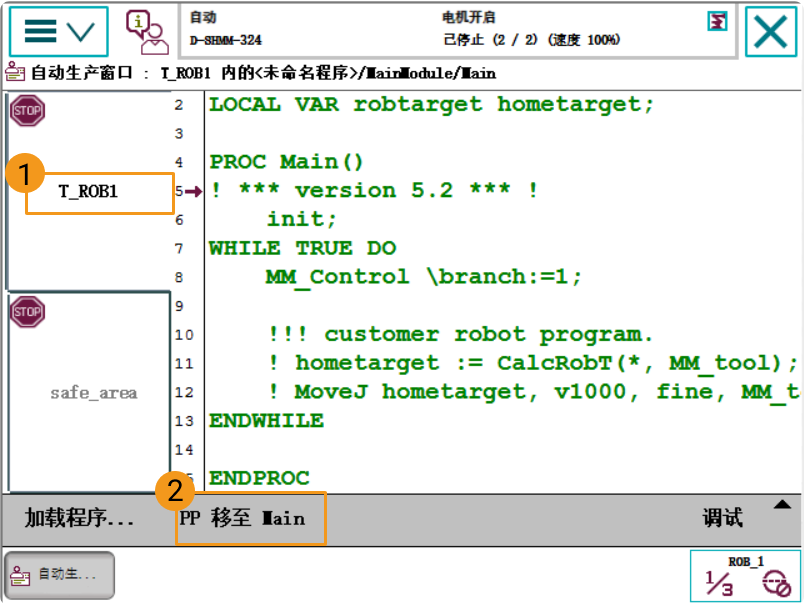
在运行Mech-Viz工程前,请重置ABB机器人前台程序,具体操作如下。
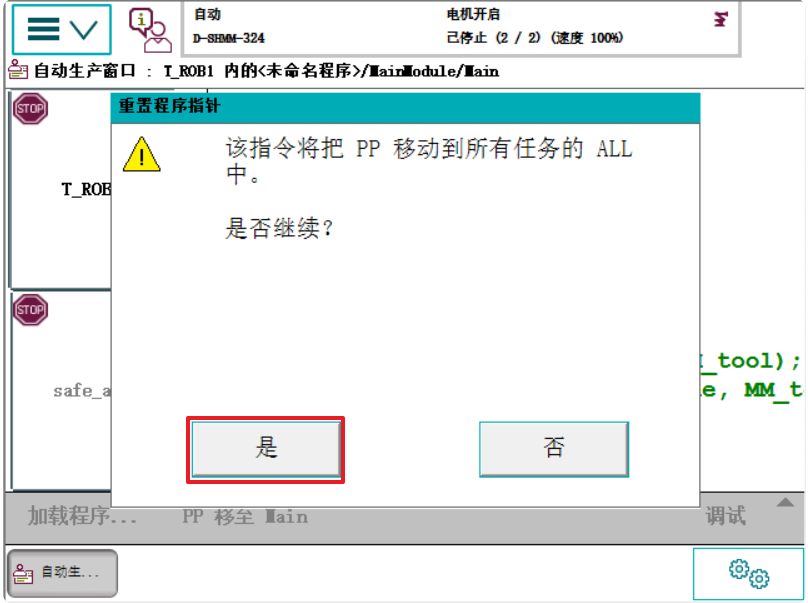
将 T_ROB1 的程序指针移至主程序,单击 PP移至main 后,在弹出的提示框中单击 是 。