标准接口指令调用时序
本节介绍标准接口指令的调用顺序及关系,根据通信对象(机器人与PLC)不同,分别介绍具体调用流程。
机器人程序调用指令说明
根据所建工程的不同,机器人程序调用的指令大致可以分为两大类: 与Mech-Vision工程相关的指令 和 与Mech-Viz工程相关的指令。
与Mech-Vision工程相关的指令
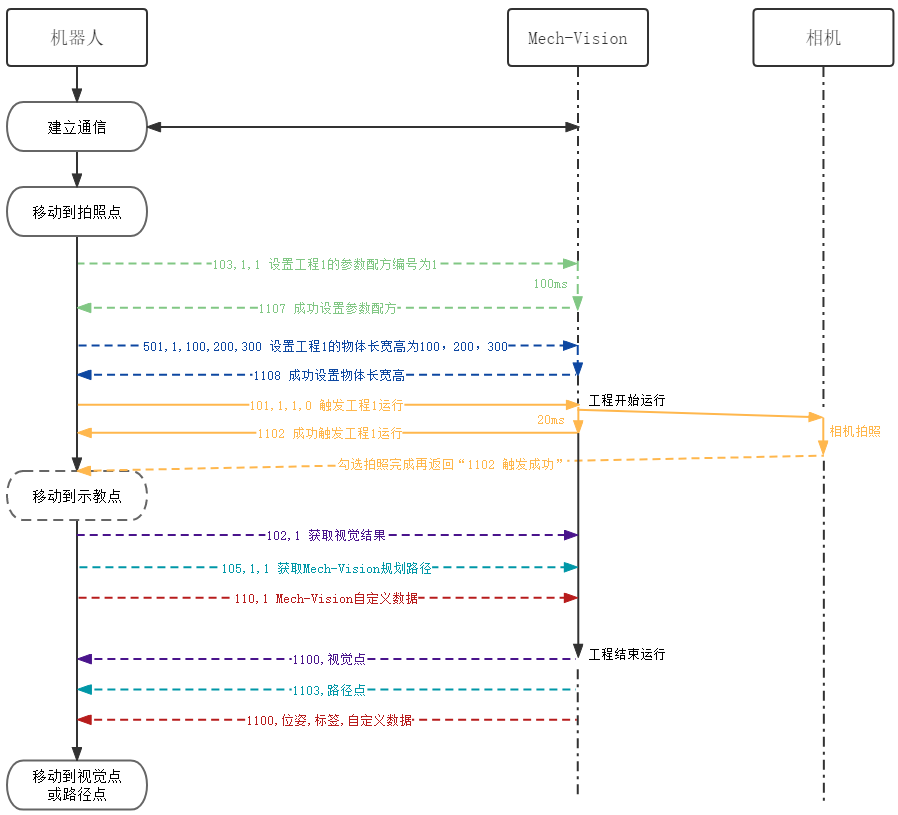
与Mech-Vision工程相关的指令调用顺序如下:
-
在运行Mech-Vision工程(101指令) 之前 进行调用的指令:
-
切换Mech-Vision参数配方(103指令)
-
向Mech-Vision工程传入物体尺寸(501指令)
-
-
运行Mech-Vision工程(101指令)。
-
在Mech-Vision工程运行 之后 进行调用的指令:
-
获取视觉结果(102指令)
-
获取Mech-Vision规划路径(105指令)
-
获取Mech-Vision自定义数据(110指令)
102、105 和 110 指令不能同时使用。
-
下图为 Mech-Vision 工程常用指令的控制时序图,其中虚线表示可选的指令(根据实际工程确定是否调用),实线表示必须调用的指令。
与Mech-Viz工程相关的指令
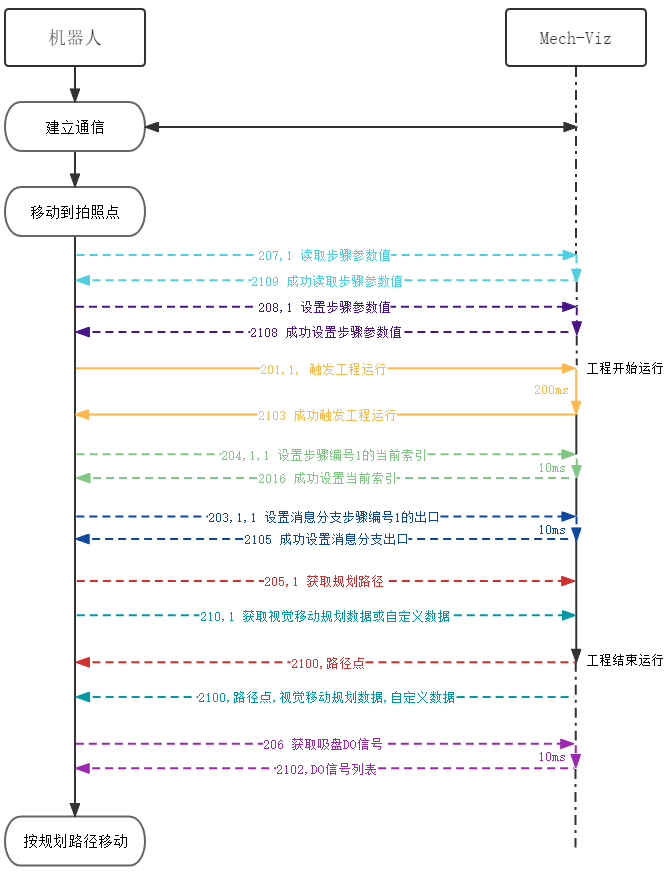
与Mech-Viz工程相关的指令调用顺序如下:
-
在运行Mech-Viz工程(201指令) 之前 进行调用的指令:
-
读取Mech-Viz步骤参数值(207指令)
-
设置Mech-Viz步骤参数值(208指令)
-
-
运行Mech-Viz工程(201指令)。
-
在Mech-Viz工程运行 期间 进行调用的指令:
-
设置Mech-Viz当前索引(204指令)
-
设置Mech-Viz消息分支出口(203指令)
-
获取Mech-Viz规划路径(205指令)
-
获取Mech-Viz视觉移动规划数据或自定义数据(210指令)
-
204 和 203 指令需要在 205 和 210 指令之前被调用。
-
205 和 210 指令不能同时使用。
-
-
在Mech-Viz工程运行结束 之后 进行调用的指令:
-
获取吸盘DO信号(206指令)
-
下图为 Mech-Viz 工程常用指令的控制时序图,其中虚线表示可选的指令(根据实际工程确定是否调用),实线表示必须调用的指令。
PLC程序调用指令说明
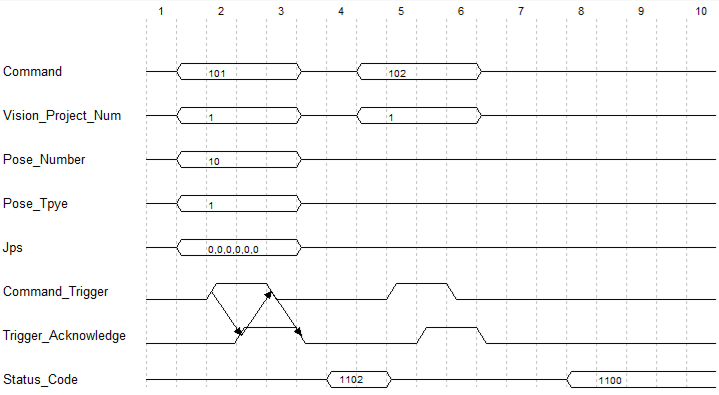
PLC程序调用指令的流程如下图所示。
说明:
-
根据各指令要求,将指令码和指令参数写入对应的寄存器。例如,101写入Command,1(工程编号)写入Vision_Project_Num。
-
触发指令时,PLC将Command_Trigger置为1,视觉系统读取指令码和指令参数。
-
视觉系统读取到Command_Trigger为1后,会将Trigger_Acknowledge置为1。
-
PLC读取到Trigger_Acknowledge为1后,即可将Command_Trigger复位,随后可将下一条指令码和指令参数写入对应的寄存器。
-
视觉系统在读取到Command_Trigger为0后,会将Trigger_Acknowledge置为0。
具体各指令调用的时序可参考 与Mech-Vision工程相关的指令 和 与Mech-Viz工程相关的指令。