标准接口通信
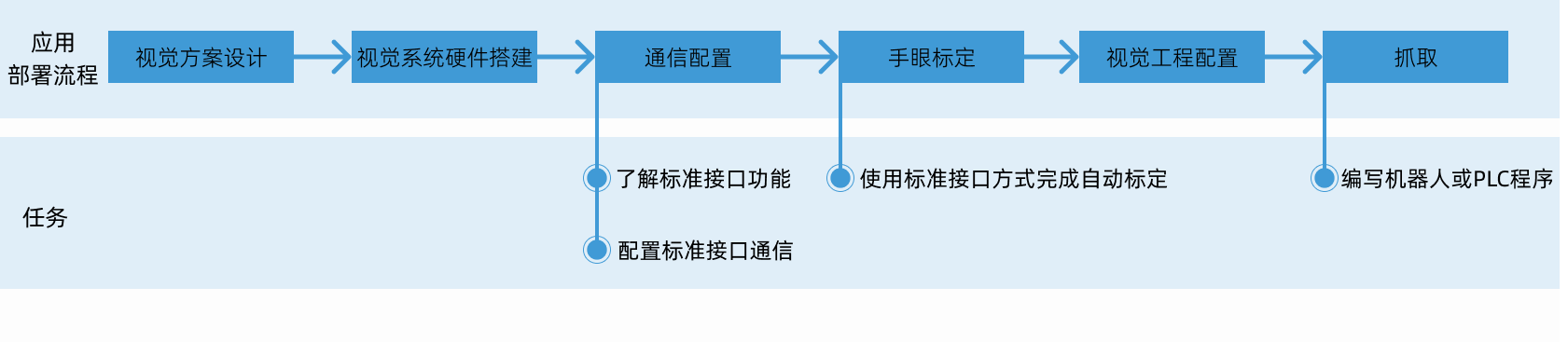
在了解标准接口通信基本概念后,用户接下来需结合实际项目及所用的机器人或PLC,在实际应用部署流程中,完成标准接口通信相关的任务。
| 本手册主要介绍部署流程中与通信相关的部分。关于部署流程中的其他详细任务,请参考应用部署流程中各小节的介绍。 |
| 任务 | 说明 |
|---|---|
了解标准接口功能 |
查阅该款机器人或PLC的标准接口功能说明,确保功能符合项目需求。 |
配置标准接口通信 |
确保机器人或PLC可以与视觉系统正常通信。 |
使用标准接口方式完成自动标定 |
建立相机坐标系与机器人坐标系间的对应关系。 |
编写机器人或PLC程序 |
查阅该款机器人或PLC的标准接口指令,并参考相应的样例程序,编写机器人或PLC程序;该程序主要功能是从视觉系统端获取目标物体信息或机器人移动路径,然后引导机器人进行相应的操作。 |
|