Inovance标准接口通信配置
本节介绍如何配置Inovance标准接口通信。
烧录前准备
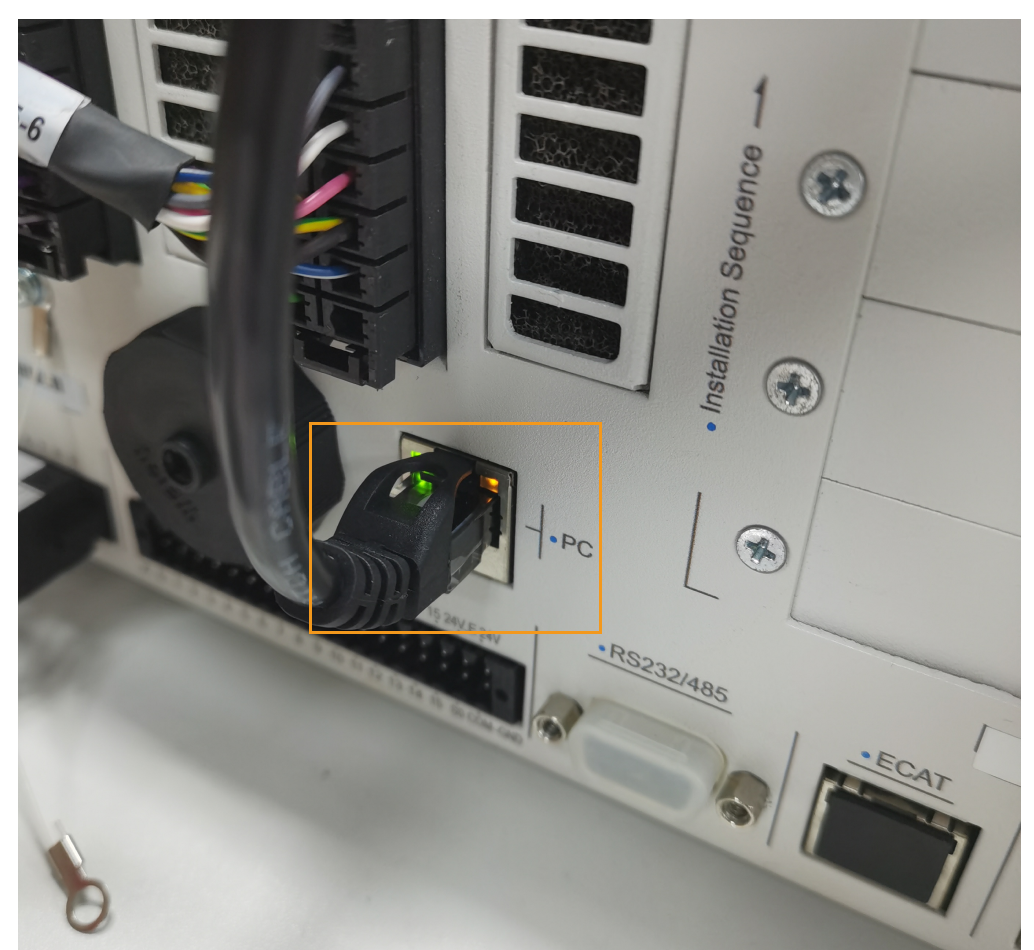
建立网络连接
软件连接
Inovance(汇川)机器人出厂时默认不自带示教器。在没有示教器的情况下,用户可使用汇川的上位机软件(InoRobotLab)代替示教器操作机器人。本篇介绍的是在没有汇川示教器下的情况,如何用InoRobotLab代替示教器配置汇川标准接口通信。若用户使用的是实体汇川示教器,需自行操作,梅卡曼德暂不提供参考教程。
| 如用户尚未安装InoRobotLab软件,可访问汇川官网InoRobotLab介绍页,在资料下载处点击软件工具与调试页签下载软件安装包并安装该软件。 |
设置IP地址
为成功连接机器人控制器和工控机,用户必须设置工控机和机器人IP地址处于同一网段。
设置工控机IP地址
在工控机上,设置工控机IP地址。
设置机器人IP地址
用户可使用InoRobotLab软件设置机器人IP地址。步骤如下。
-
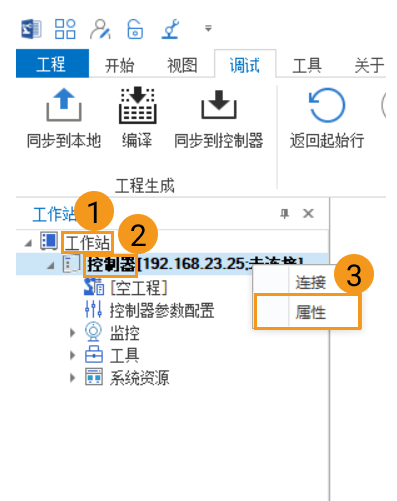
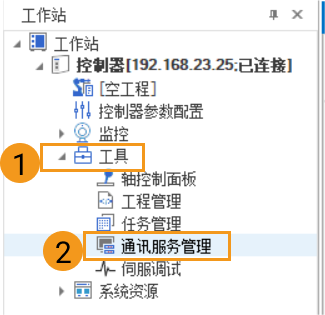
打开InoRobotLab软件,进入软件主页面。在软件主页面工作站区域,选择。
-
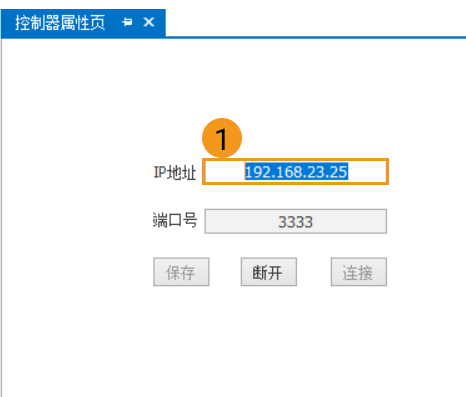
在控制器属性页对话框,设置机器人IP地址。
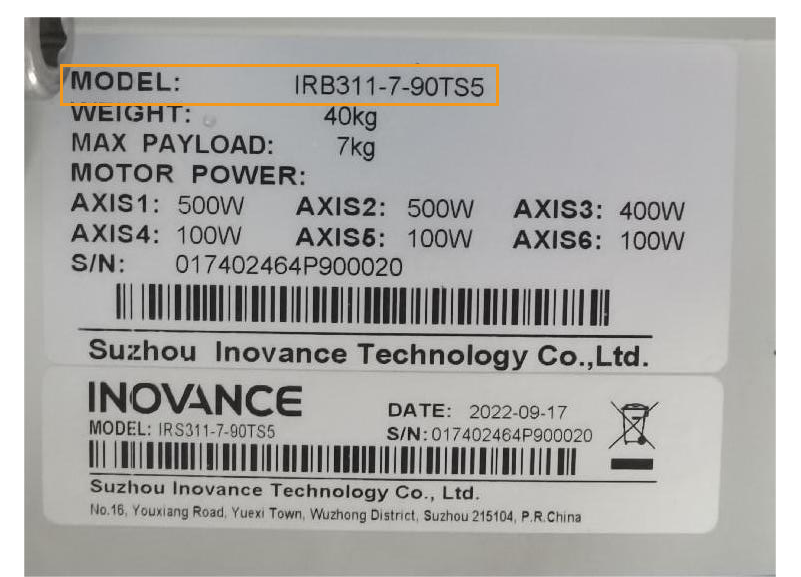
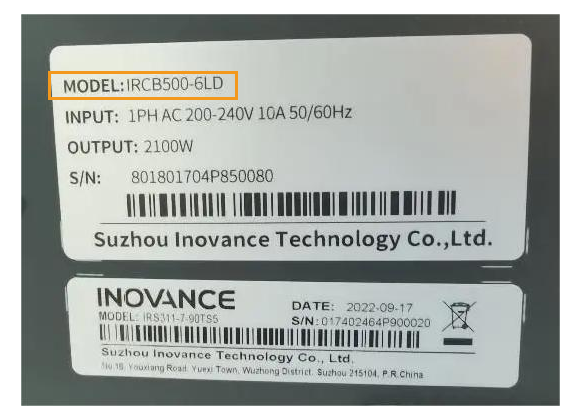
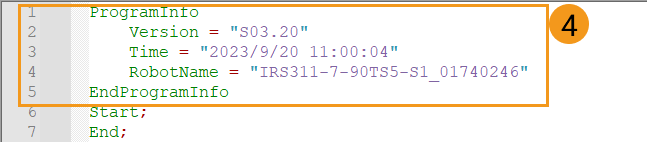
检查控制器型号和版本


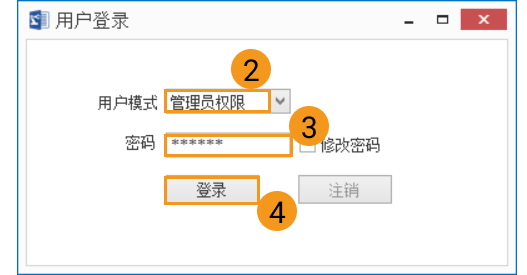
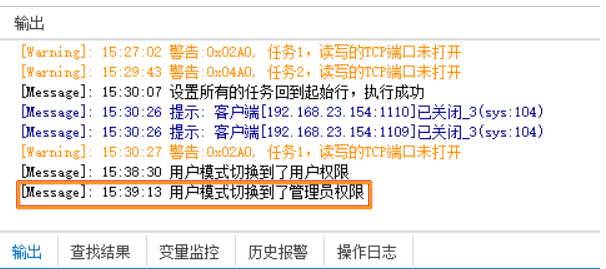
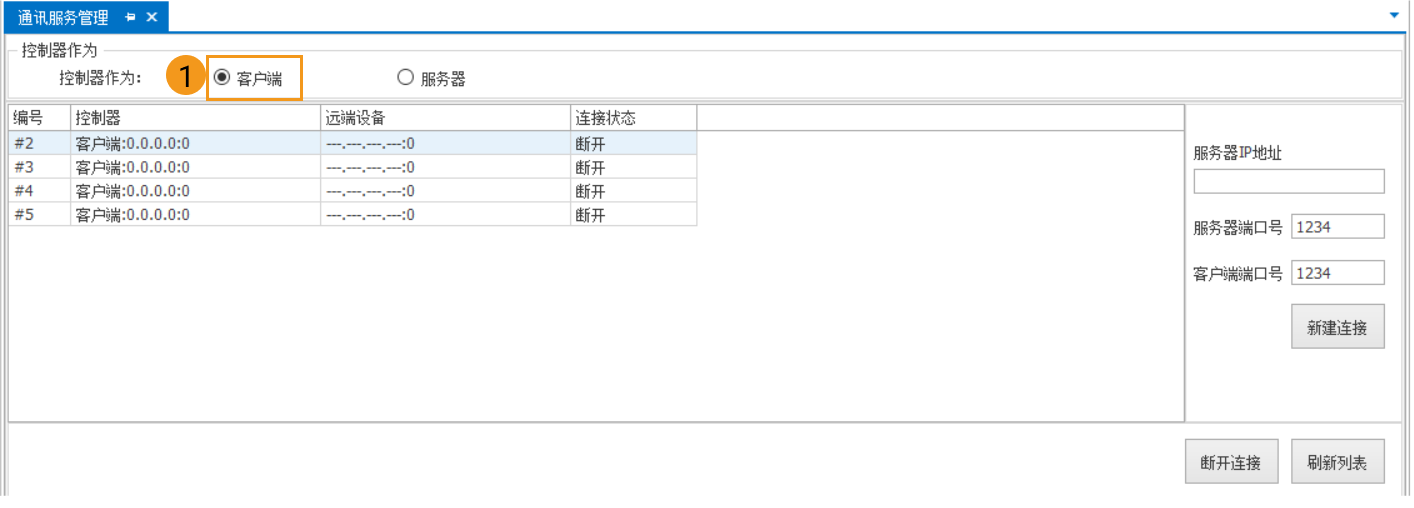
打开客户端服务
用户可使用机器人端作为客户端与视觉系统通讯。切换机器人通讯服务需要获取管理员权限。

设置机器人通信配置
-
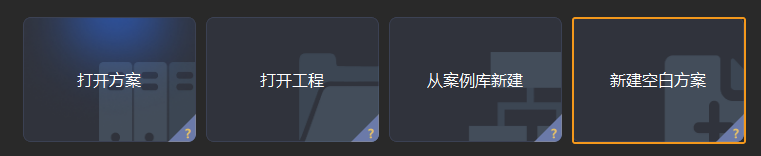
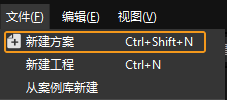
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
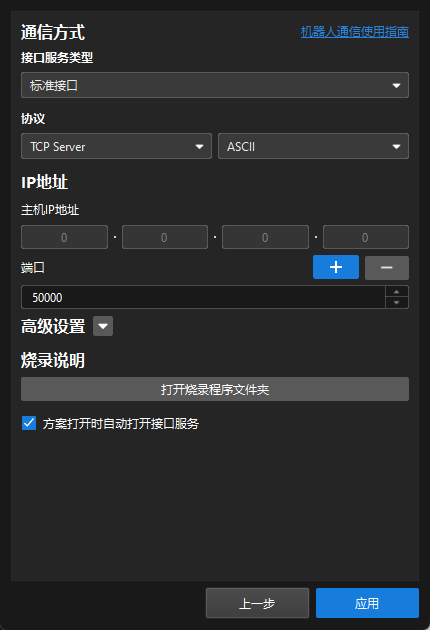
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 ASCII。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人中
选择烧录的文件
待烧录文件存放于Mech-Vision和Mech-Viz软件安装路径 Communication Component\Robot_Interface\INOVANCE 目录下。待烧录文件如下图所示。

待烧录文件介绍:
-
sample: 其中包含三个抓取示例程序。
-
MM_Auto_Calib.pro:自动标定程序。
-
MM_module.pro:程序模块文件。
烧录文件至机器人中
新建工程
梅卡曼德提供的是单独的机器人文件,而非工程。因此,在烧录文件之前,如果用户没有工程,需新建一个工程;如已有工程,可跳过新建工程这一步骤。
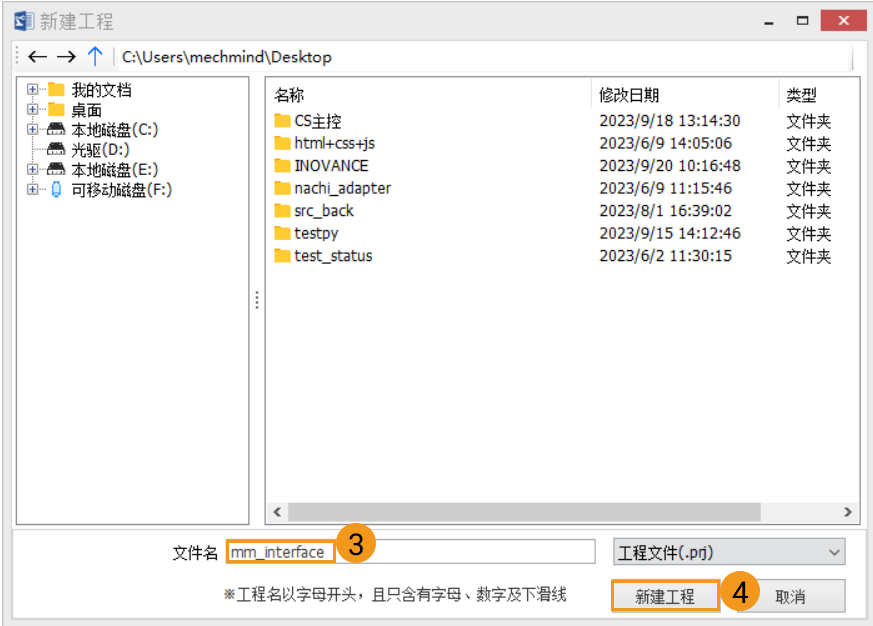
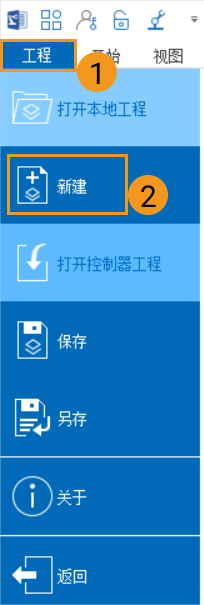
方式一:在InoRobotLab软件主页面左上角,点击![]() 图标,打开起始页页签,然后点击新建工程。在新建工程对话框,输入文件名,然后点击新建工程。
图标,打开起始页页签,然后点击新建工程。在新建工程对话框,输入文件名,然后点击新建工程。

方式二:在InoRobotLab软件主页面左上角,选择。在新建工程对话框,输入文件名,然后点击新建工程。
导入烧录文件
-
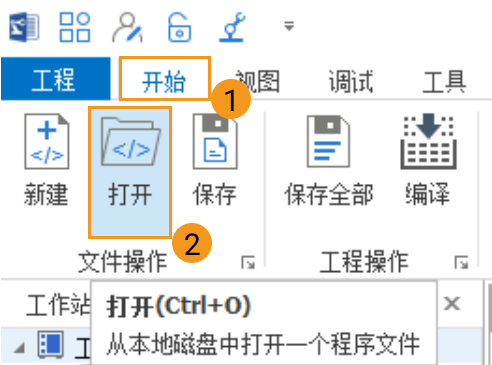
在InoRobotLab软件工具栏选择。
-
在打开本地文件对话框,使用Mech-Vision和Mech-Viz软件安装目录下的
Communication Component\Robot_Interface\INOVANCE路径找到MM_module.pro文件,点击打开。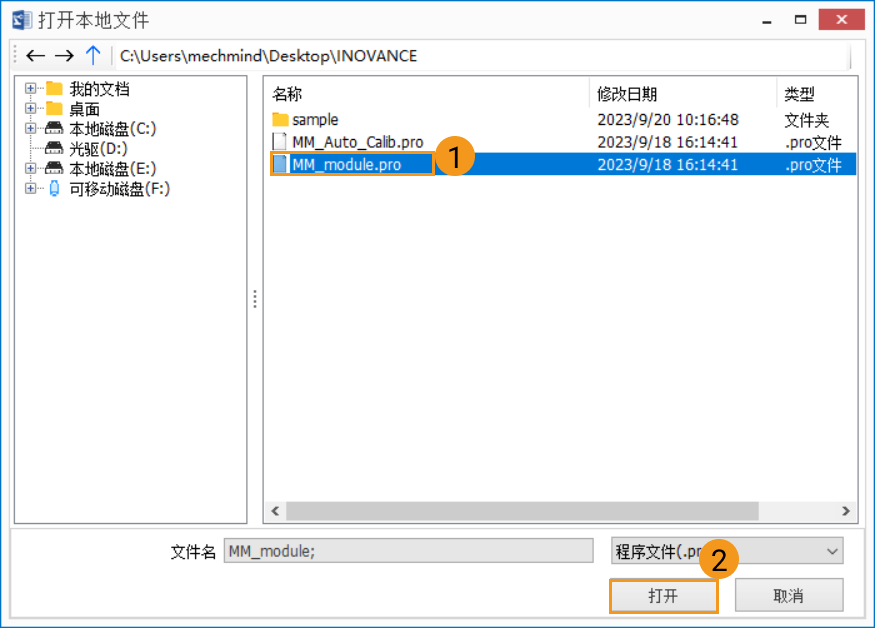
-
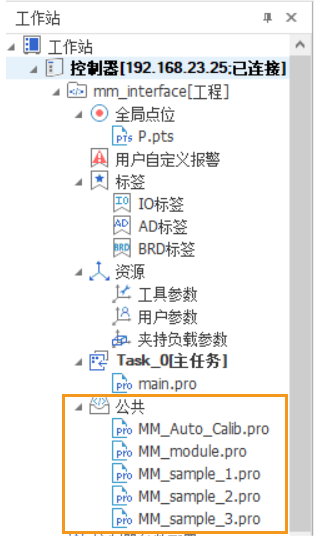
以同样的步骤打开MM_Auto_Calib.pro、 sample\MM_sample_1.pro、sample\MM_sample_2.pro、sample\MM_sample_3.pro文件。导入后,文件将显示在公共区域下。
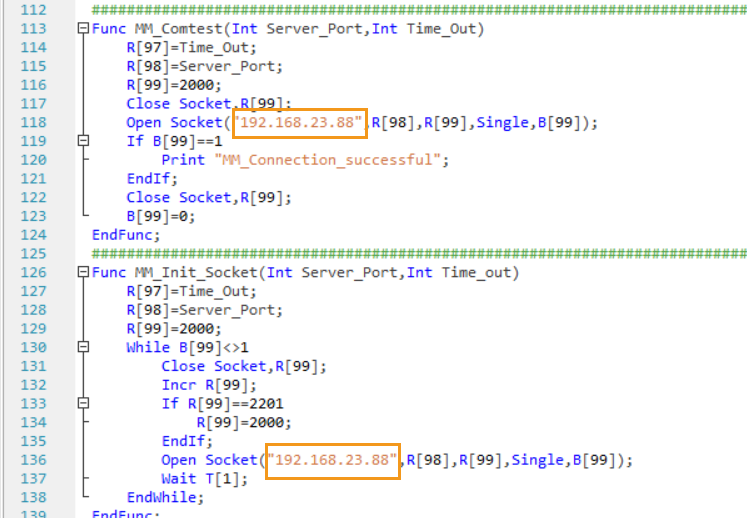

测试标准接口通信
-
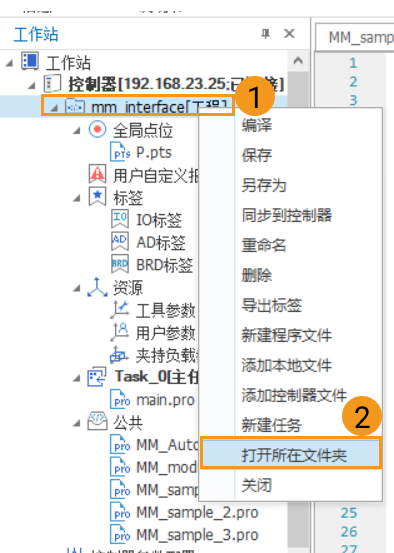
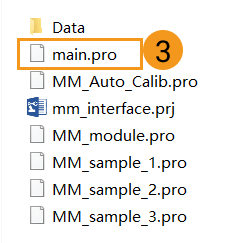
在InoRobotLab软件主页面文件中,双击打开main.pro文件,然后在main.pro文件中输入以下代码。
Include "MM_module.pro" Start; MM_module.MM_Contest(50000,300); End;上述代码中的 50000是设置机器人通信配置步骤中设置的Mech-Vision端口号。请保持两处端口号一致。 -
在InoRobotLab软件主页面工具栏,选择。

-
在InoRobotLab软件主页面工具栏,选择,以运行程序。

-
若机器人与视觉系统间的通信连接成功,则Mech-Vision日志窗口的控制台标签页下会出现相关提示。
