配置 FANUC CRX 标准接口通信
CRX 插件基于 TCP 协议进行 Socket 通信,从而与工控机上的视觉系统完成交互。在网络环境和双方 IP 设置无变化时,只需要完成一次通信配置步骤。
| CRX 插件重装后需要重新进行通信配置。 |
CRX 插件与视觉系统建立连接前,请确保以下项已完成。
-
CRX 插件已成功安装。
-
机器人控制器已通过以太网连接至 Mech-Mind 工控机(可经路由器中转)。
设置“机器人通信配置”
-
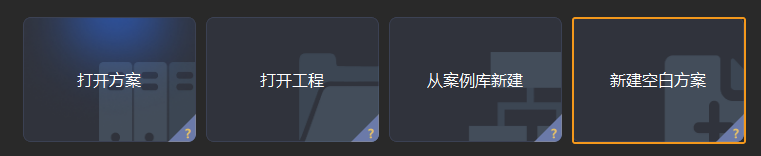
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
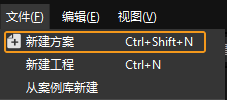
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
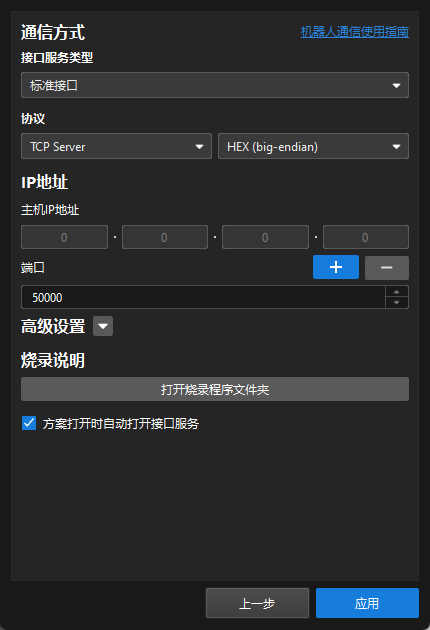
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 HEX(big-endian)。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

设置示教器端通信
-
设置机器人 IP 地址。
-
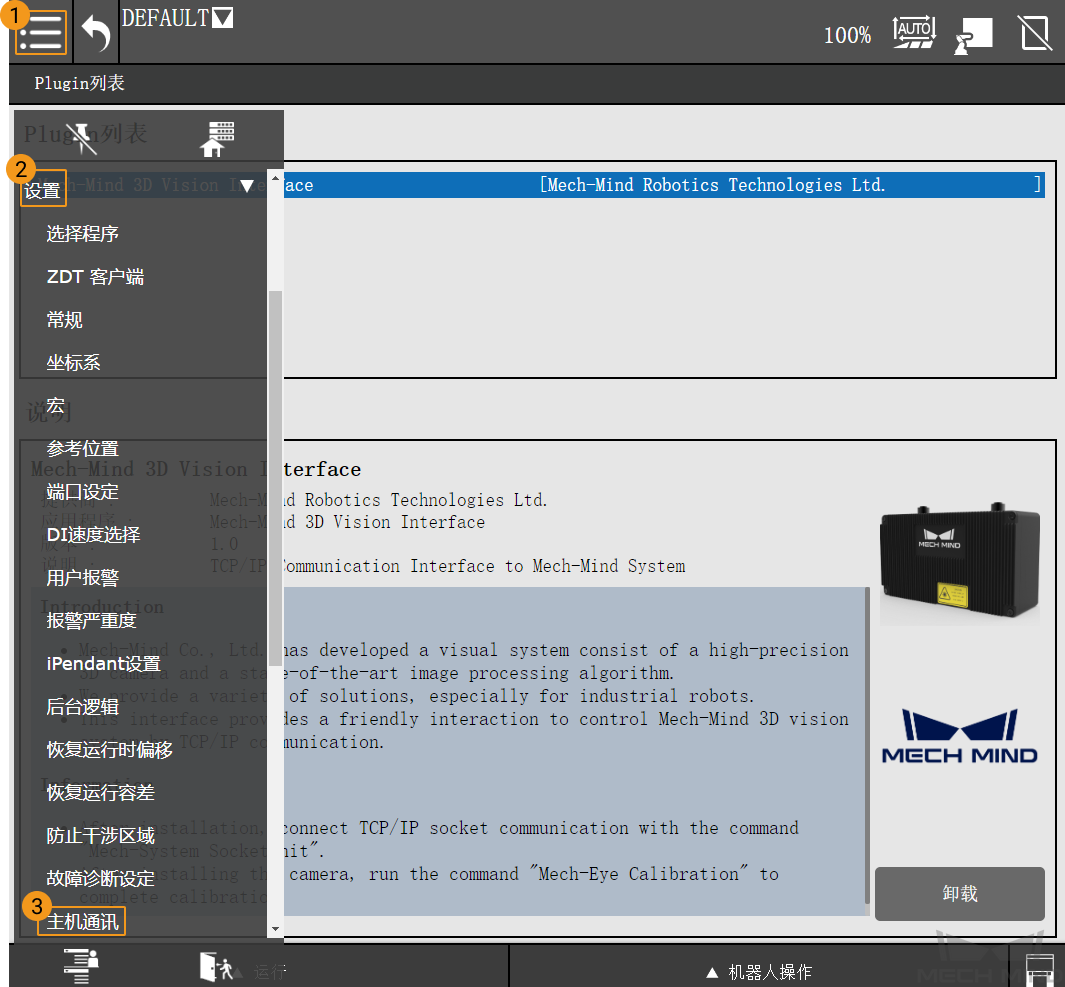
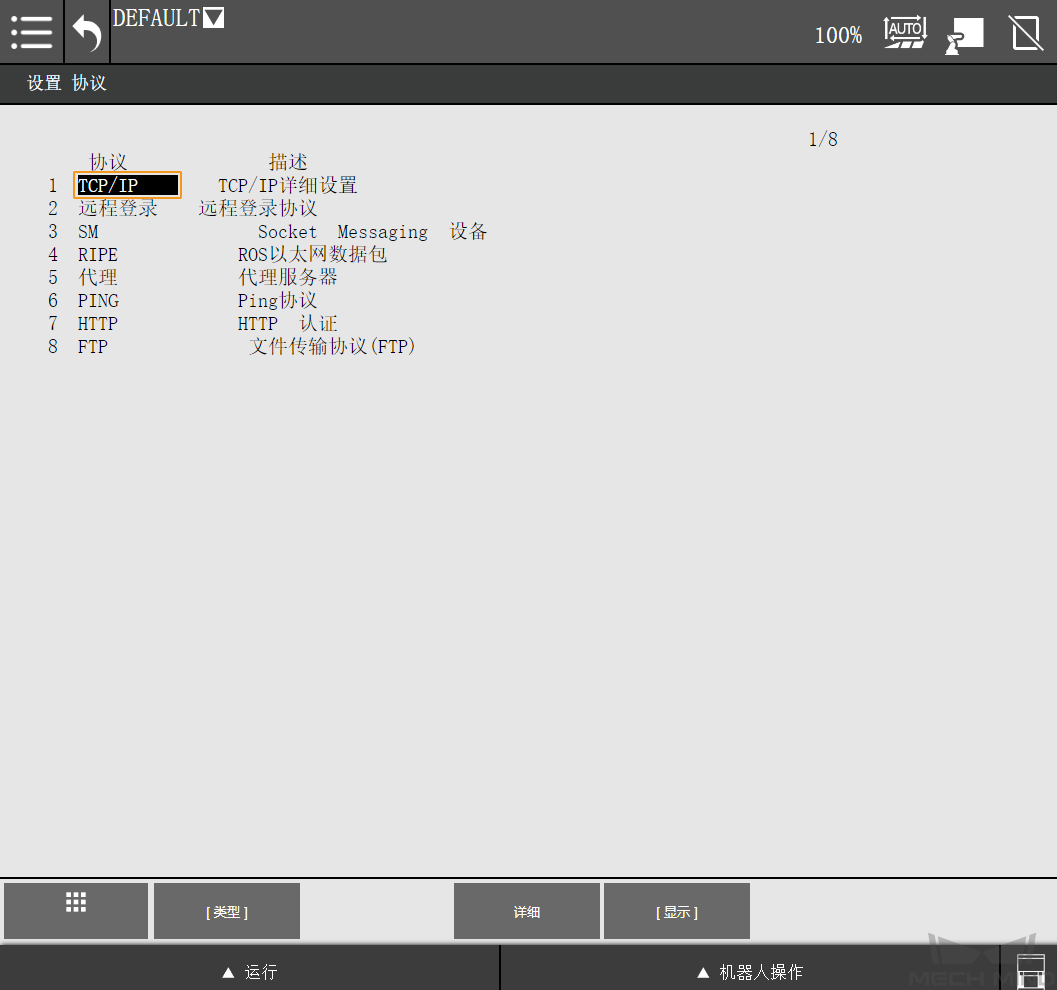
单击完整菜单,依次选择 设置 > 主机通信 ,进入设置协议界面。
-
单击 TCP/IP ,按需求设置 IP地址 和子网掩码。
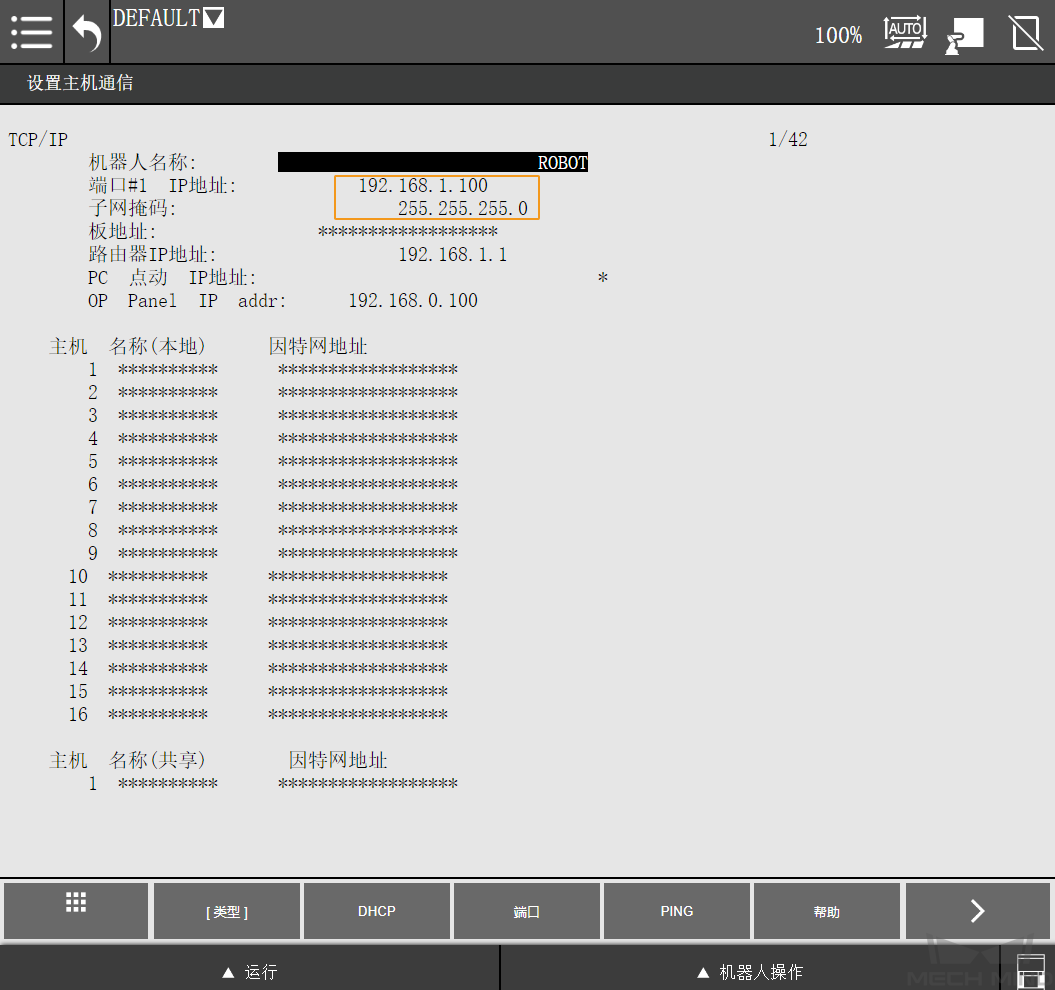
-
-
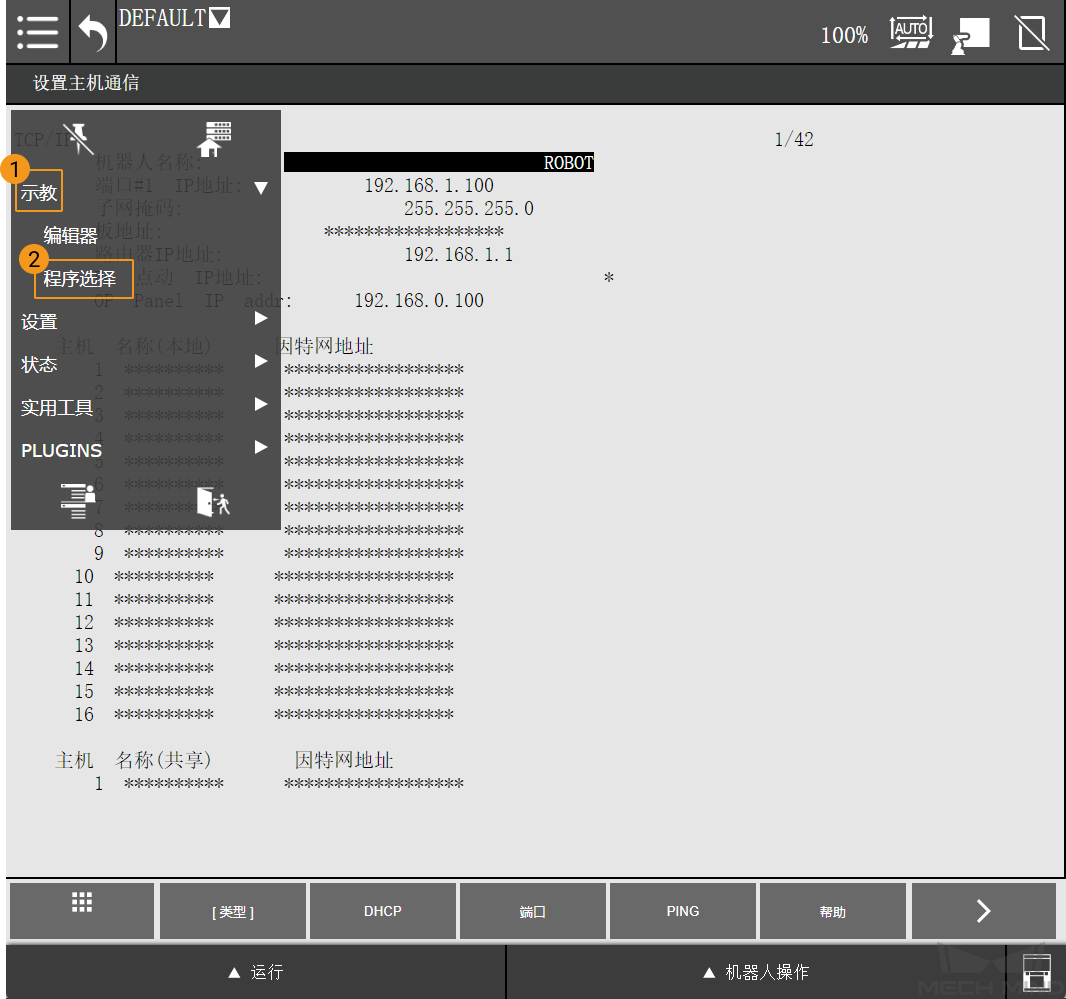
新建机器人程序。
-
单击菜单,切换至常用菜单,依次选择 示教 > 程序选择 。
-
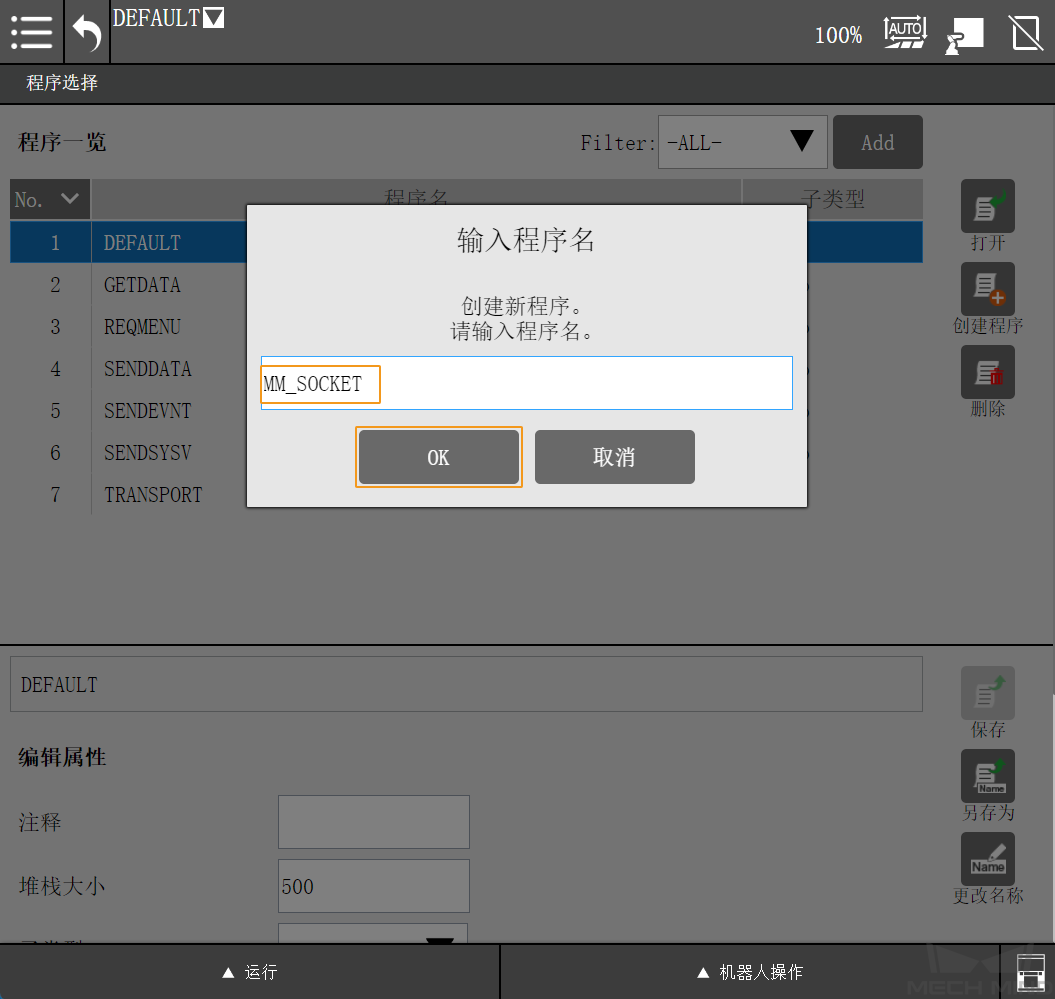
单击右侧栏的 创建程序 。
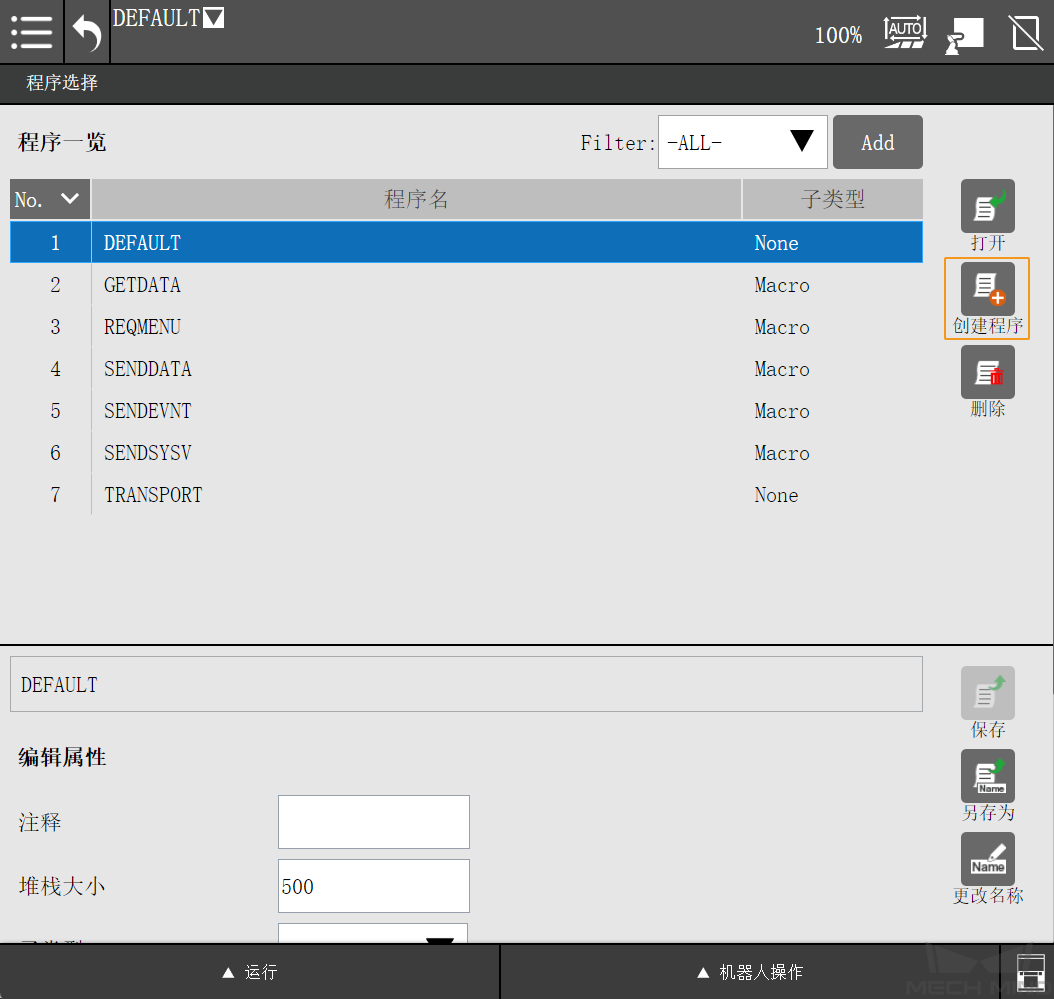
-
输入程序名,例如 MM_SOCKET,然后单击 OK 。
-
程序的属性使用默认设置即可,单击 OK 。

-
-
调用通信连接功能。
-
进入上一步创建的程序。
自动模式无法进行程序的编辑以及参数修改。如果右上角指示显示处于自动模式(图标为  ),请单击切换至手动模式(图标为
),请单击切换至手动模式(图标为
 )。
)。
-
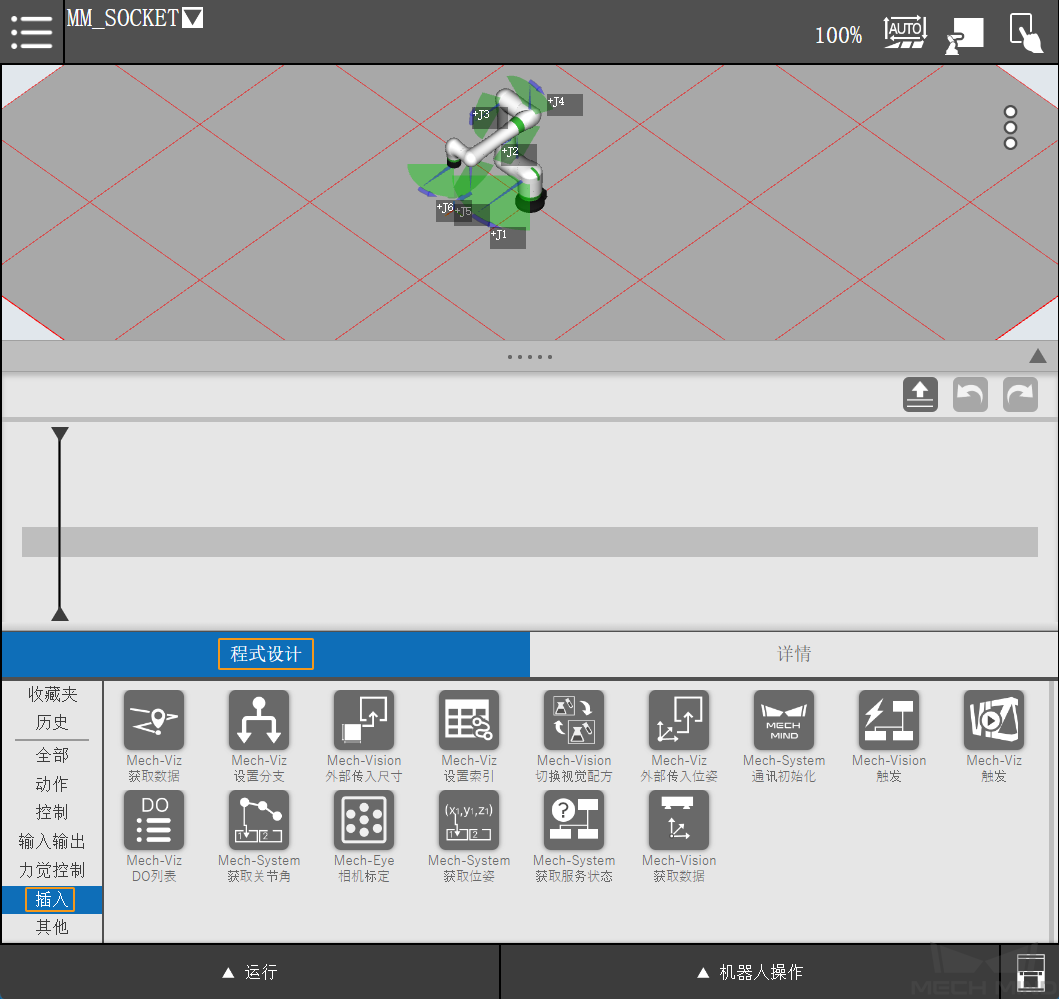
依次选择 程式设计 > 插入 ,全部插件会在底部右侧显示。
-
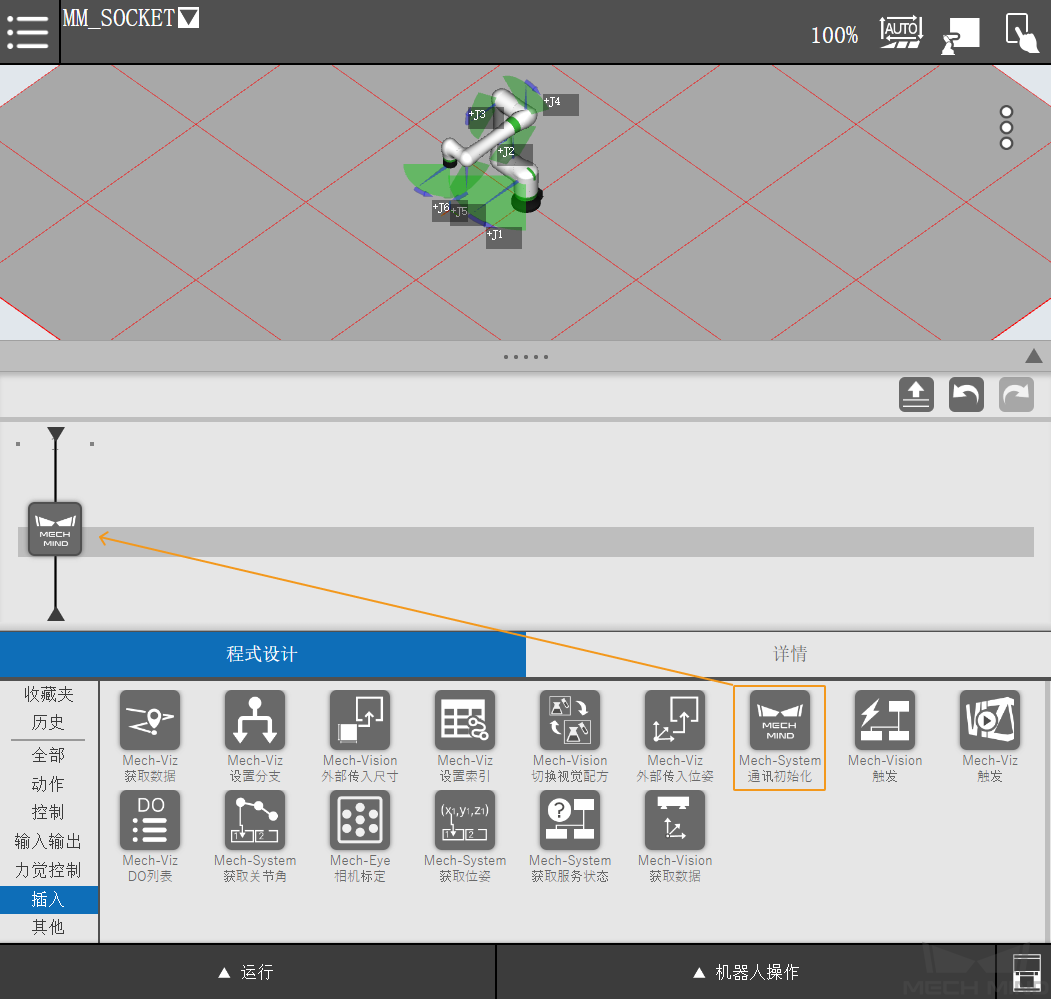
查找 Mech-System 通讯初始化 ,将其拖入上方动作流。
-
单击拖入的指令,进入该指令的详情页面。将此处的 IPC 的 IP 地址 设置为工控机 IP,将 IPC 端口 设置 Mech-Vision 中配置的端口号。
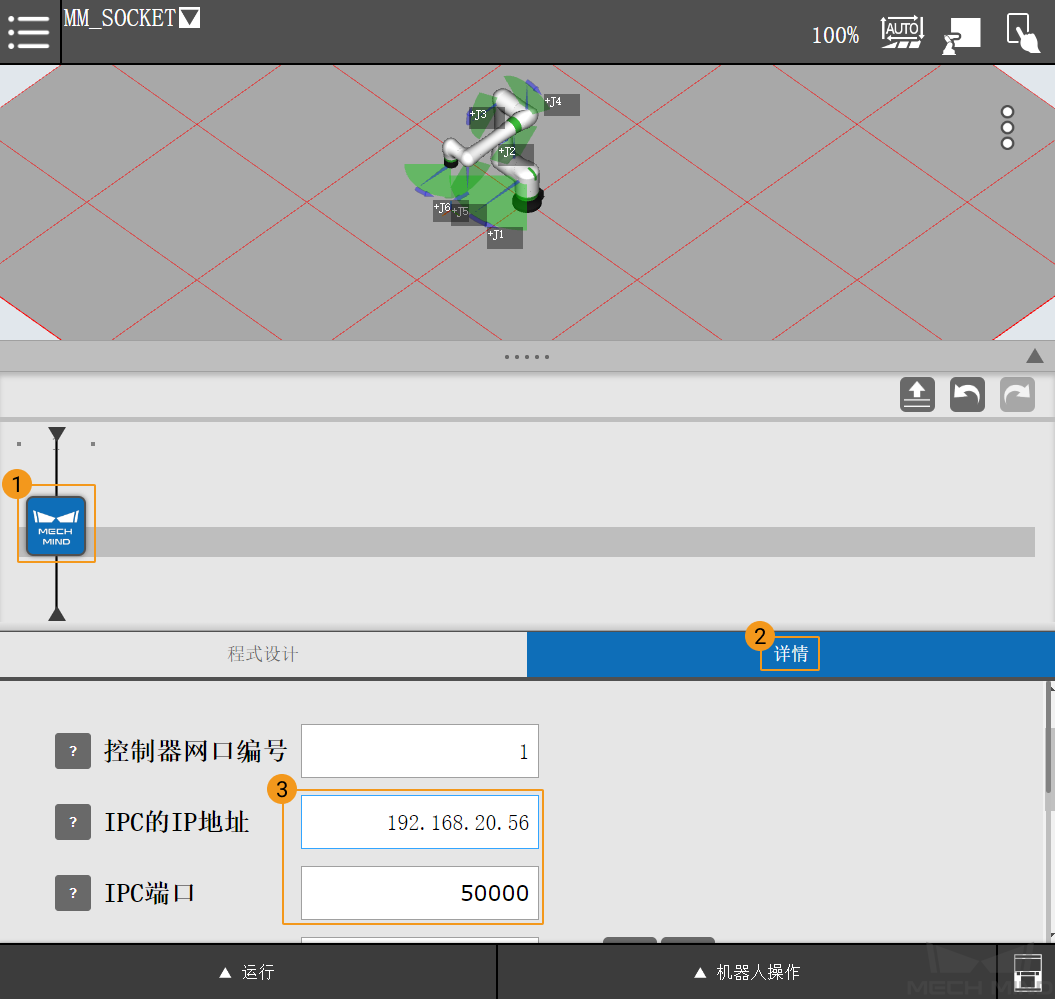
在使用过程中,可随时按住参数左侧问号,显示详细说明。
-
单击右上角手动模式(图标为
),便可切换至自动模式(图标为
)。 -
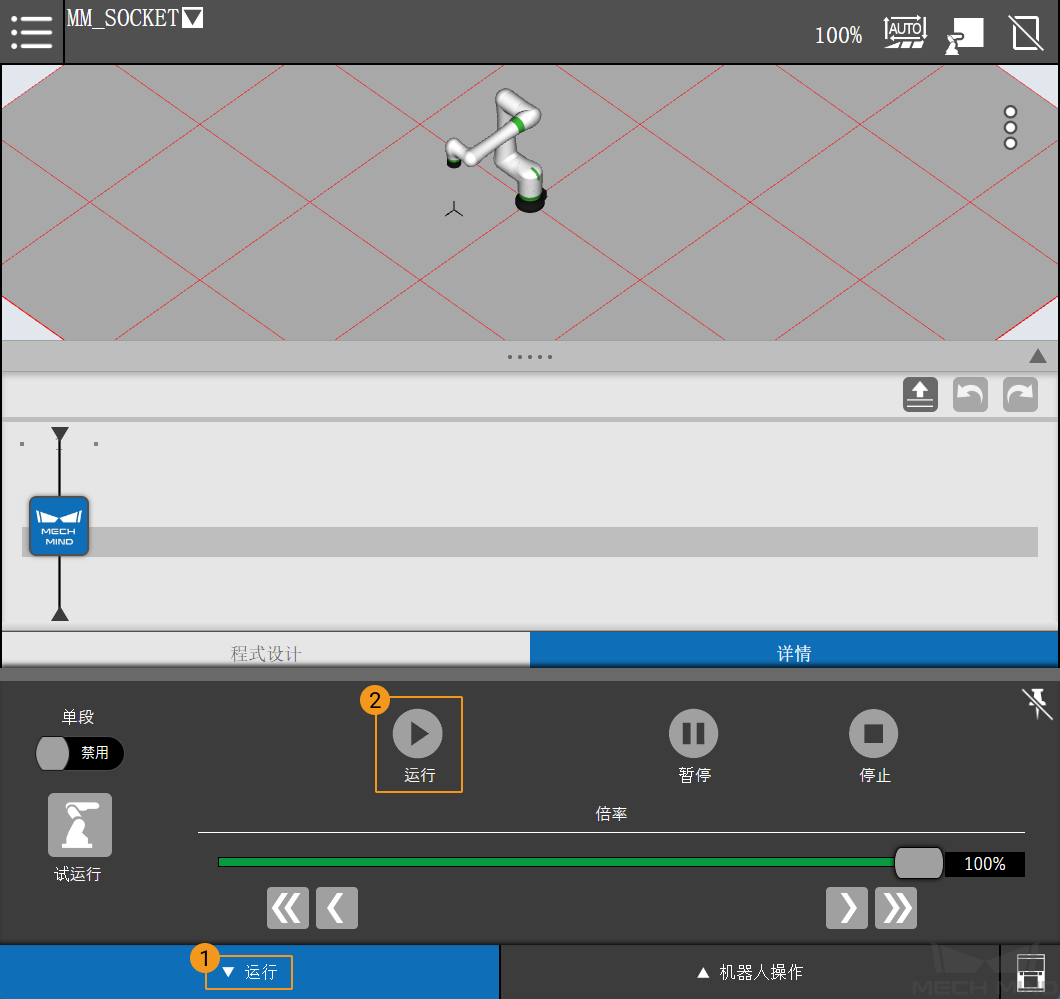
单击左下角 运行 选项,然后单击 运行 。
-
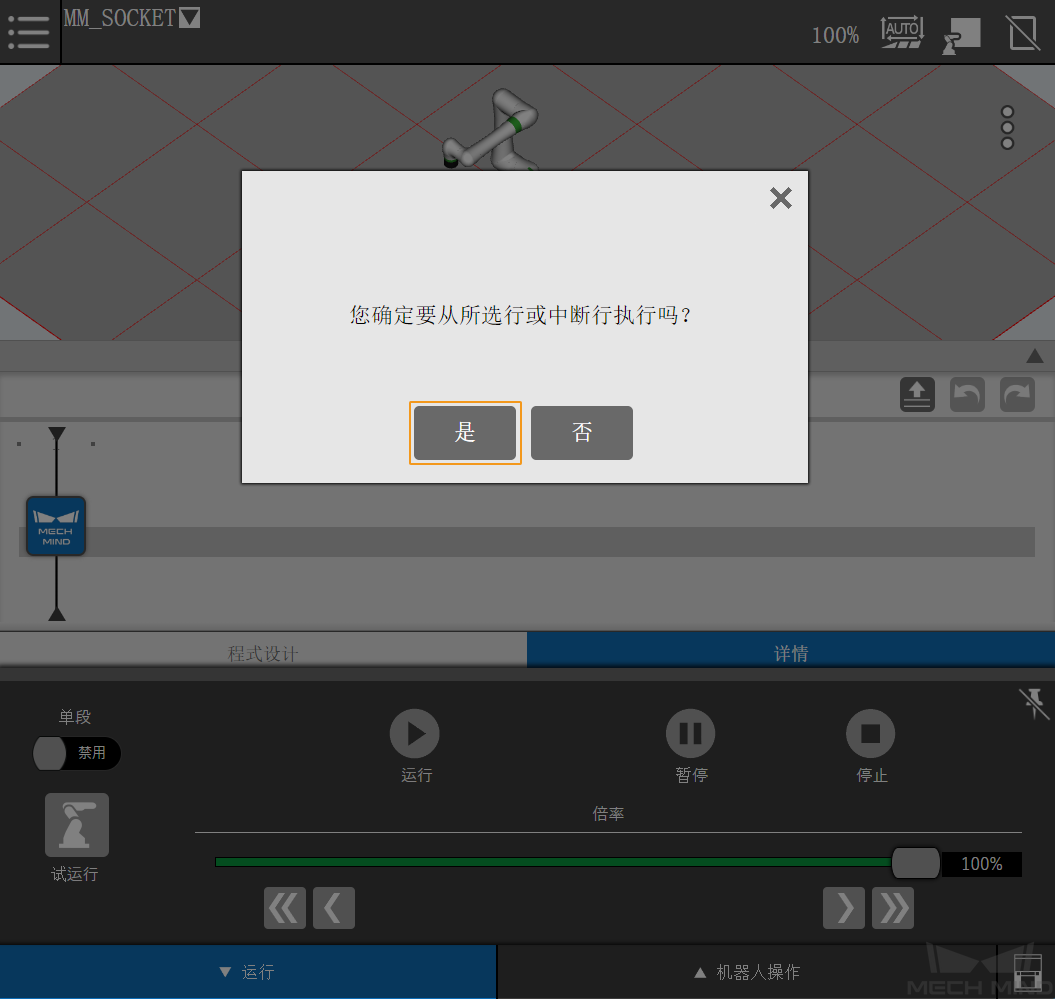
在弹出的对话框中,单击 是 。
-
页面会自动跳转至完整菜单内的 用户 选项,并打开用户界面。“MM:Restart Robot”说明成功完成通信配置;“MM:Init Connection Successfully”说明通信测试成功。
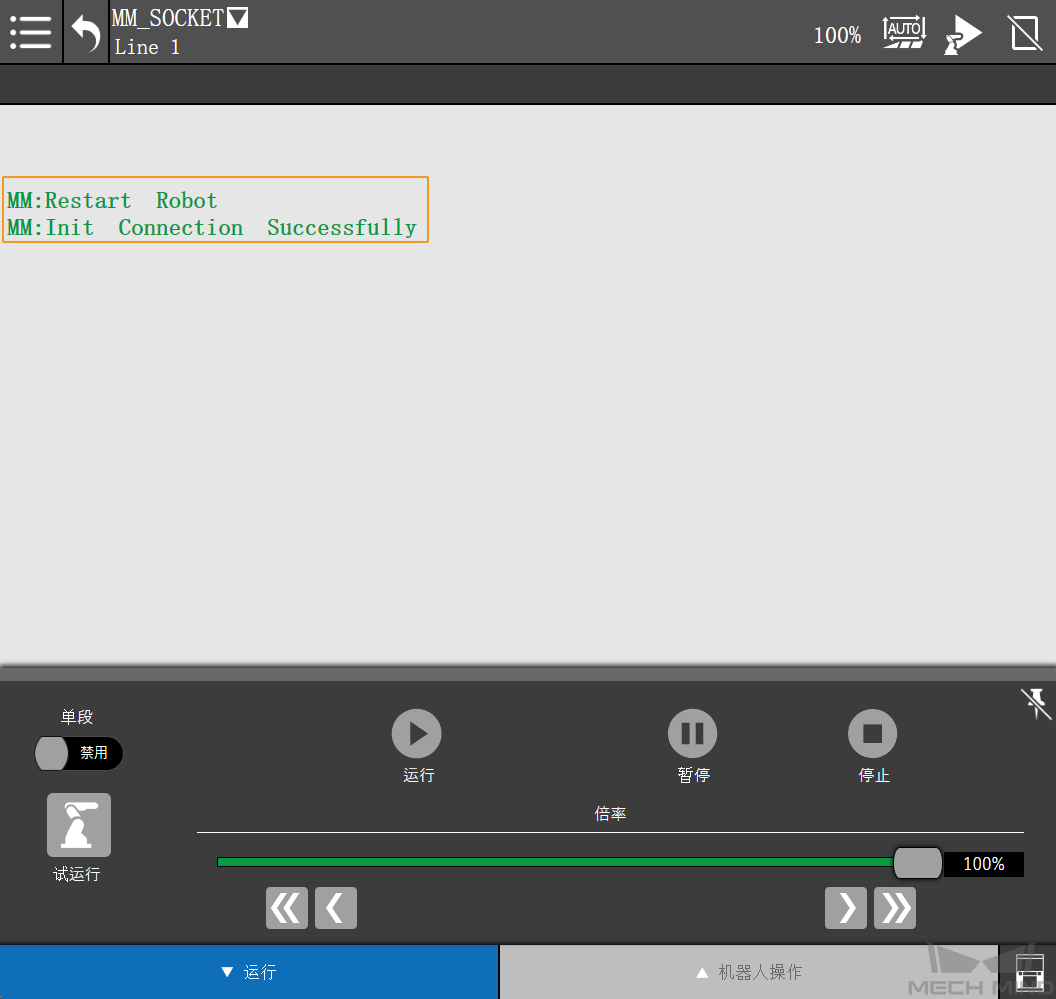
同时,Mech-Vision 日志窗口的 控制台 标签页下会出现相关提示。

-
-
手动关闭控制器电源,并重新启动。