对于ABB机器人,标准接口程序如何实现后台运行?
对于ABB机器人而言,当主任务调用子任务时,主任务属于前台程序;子任务属于后台程序,需要在机器人系统开机后自动运行。下面讲解如何为ABB机器人创建标准接口后台程序并实现后台运行。
| 在开始前,请确保已完成ABB标准接口通信配置。 |
创建并运行后台程序
-
按照下图所示,使用RobotStudio连接机器人,依次单击,新建一个用于后台运行的子任务(例如,mm_vision)。
在初次创建子任务时,任务的Type属性可暂时先设置为Normal,并在此模式下编写程序代码。在程序通过测试后,再将任务的Type属性修改为Semistatic(表示任务在后台自动运行)。 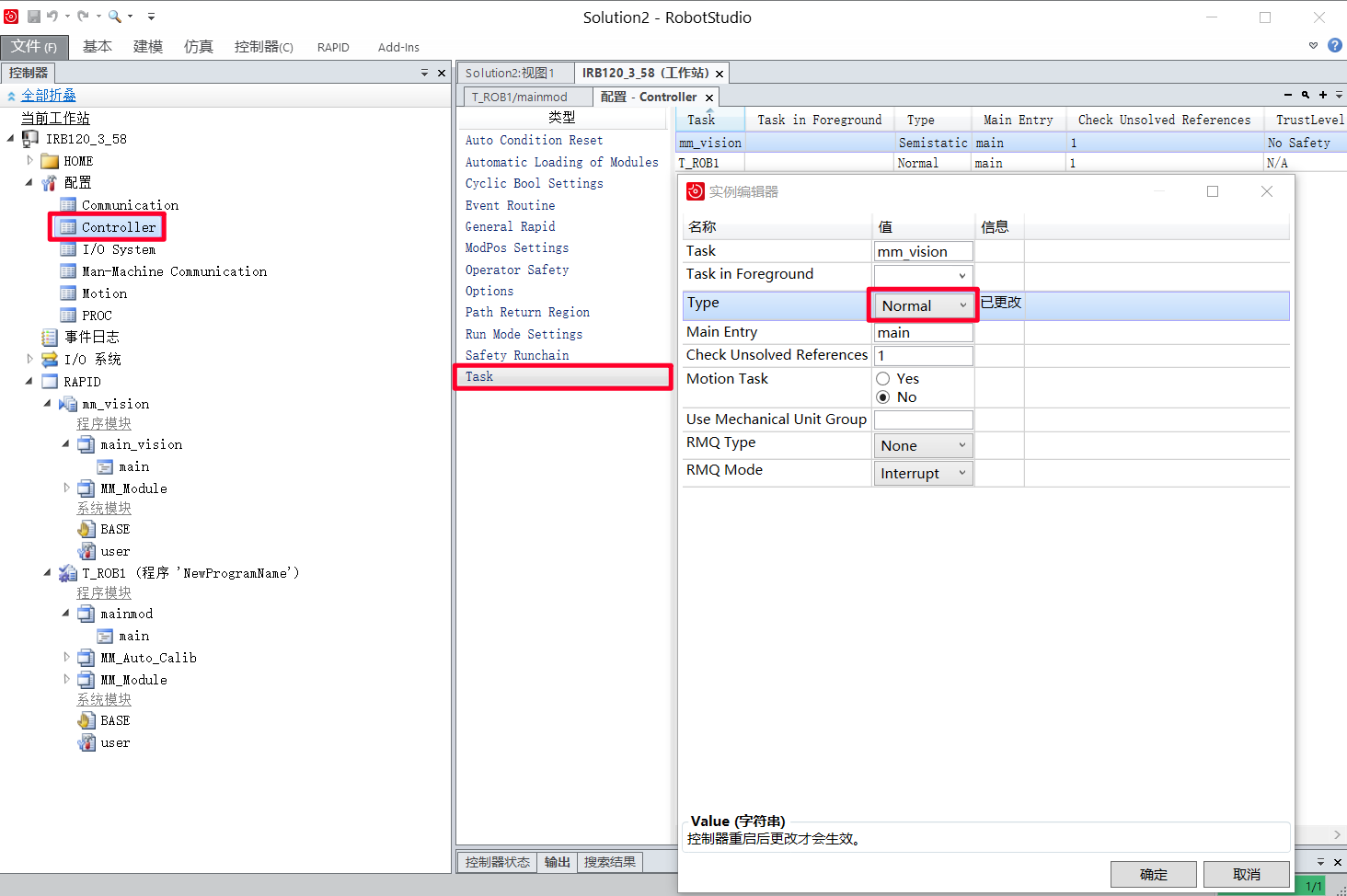
-
重启控制器。
-
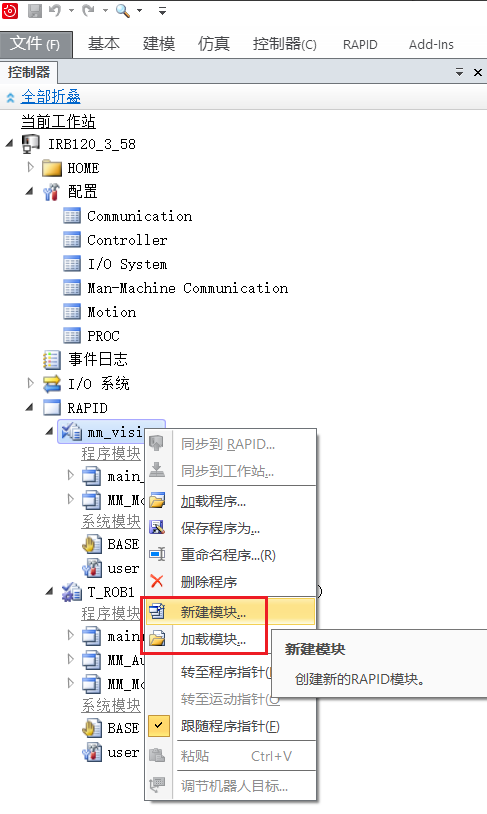
重启控制器后,在任务mm_vision中,加载之前烧录的MM_Module标准接口模块,并新建一个main_vision模块。
-
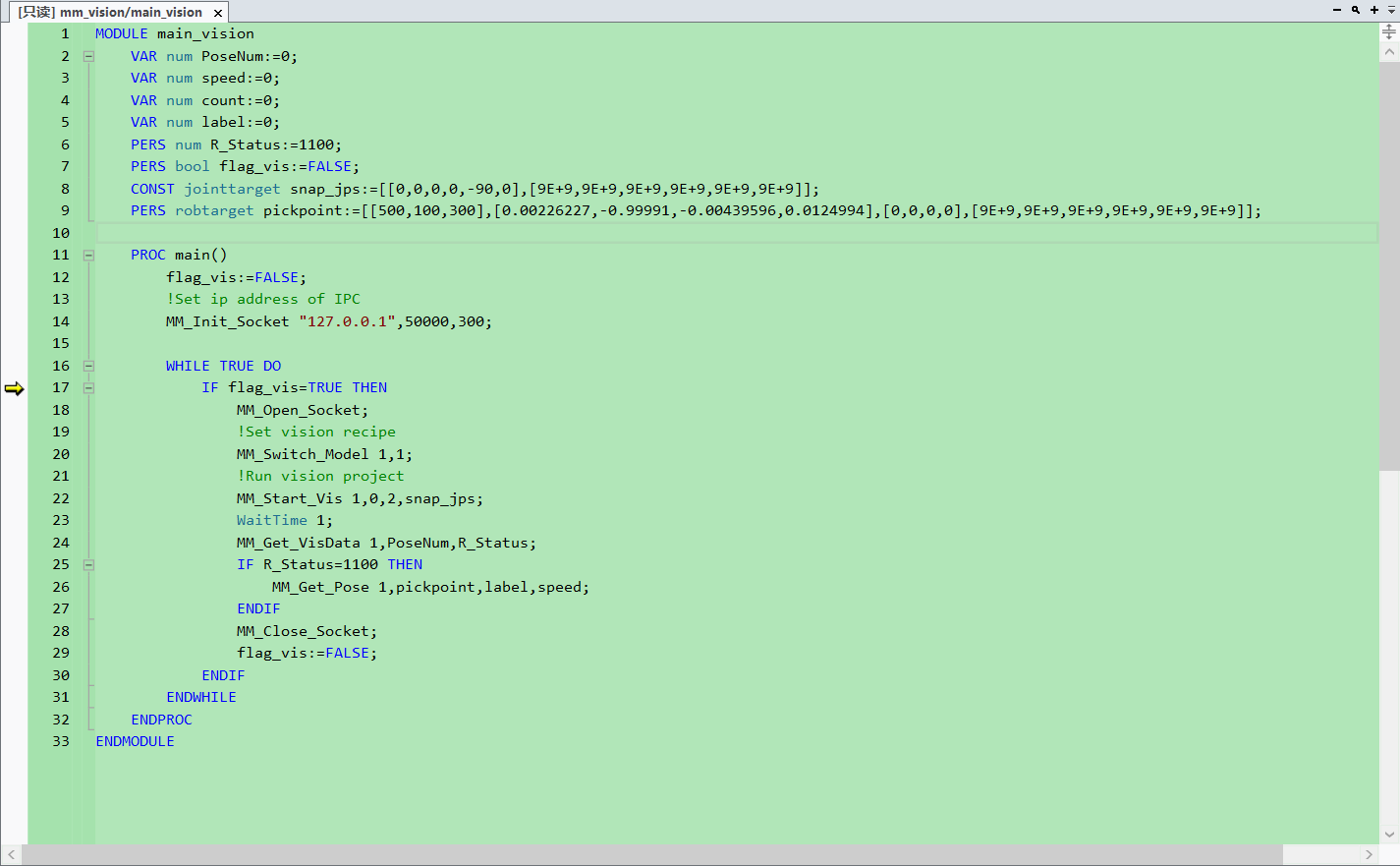
打开main_vision模块,在其中编写子任务相关的代码。例如,图中示例代码表示触发Mech-Vision工程运行并获取视觉结果。
-
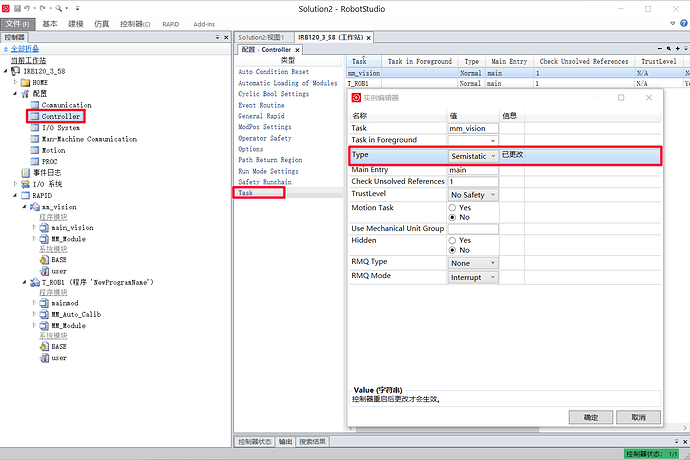
在上述代码经过测试后,可按下图所示,将后台任务mm_vision的Type属性改为Semistatic,然后重启控制器,以使后台程序开机自动运行。
创建并运行前台程序
-
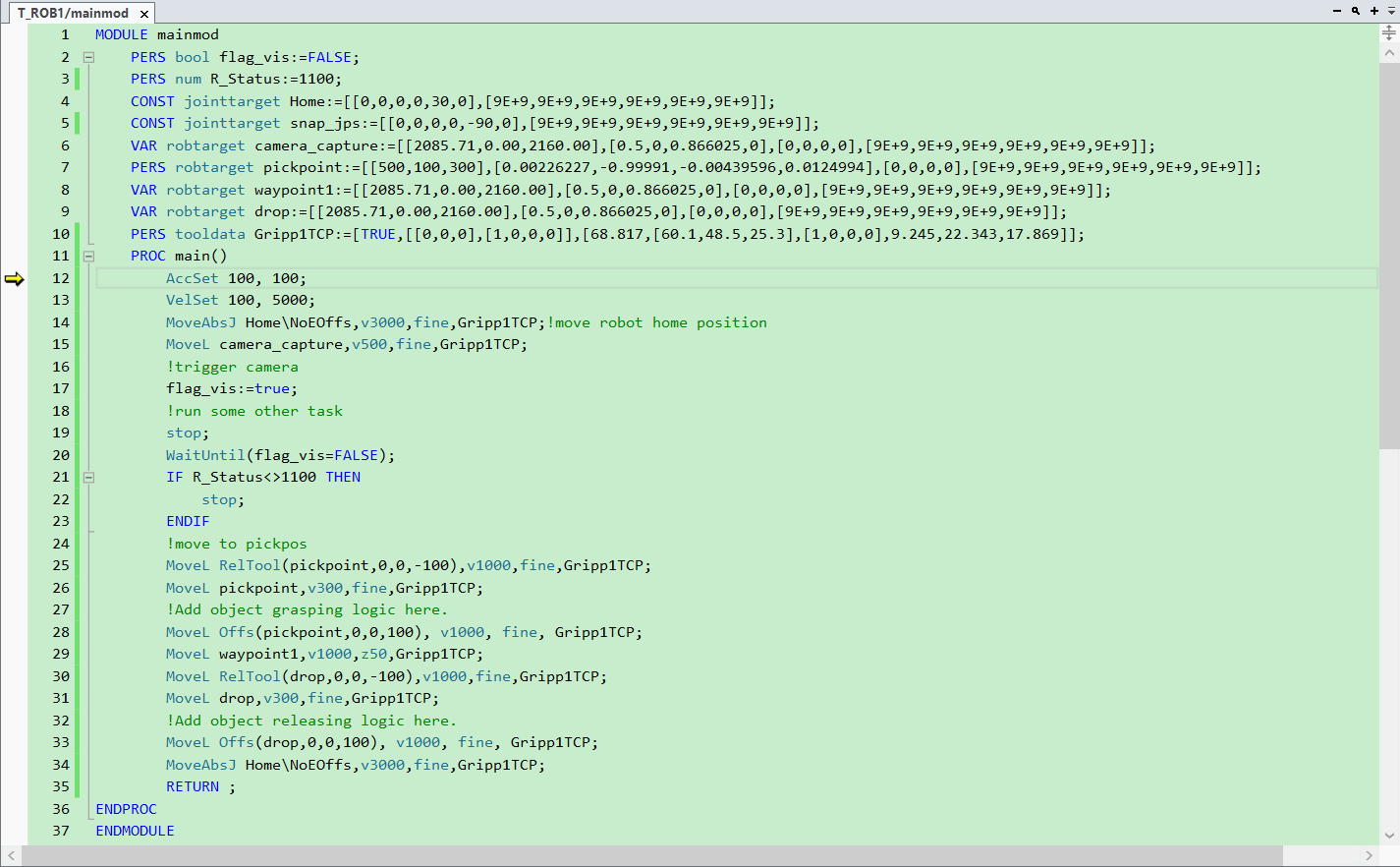
新建并根据实际应用工作流程编写主任务程序(前台程序)。例如,图中示例代码表示,当flag_vis为true时,主任务调用子任务。
-
在确定后台程序正常运行后,再运行上述前台程序,具体运行方法可参考运行标定程序。