DENSO标准接口通信配置
本节介绍如何配置DENSO机器人标准接口通信。
烧录前准备

建立网络连接
-
将工控机网线的另一端插入机器人控制器网口。
-
确认机器人IP地址与工控机IP地址在同一网段。
单击查看操作方法
-
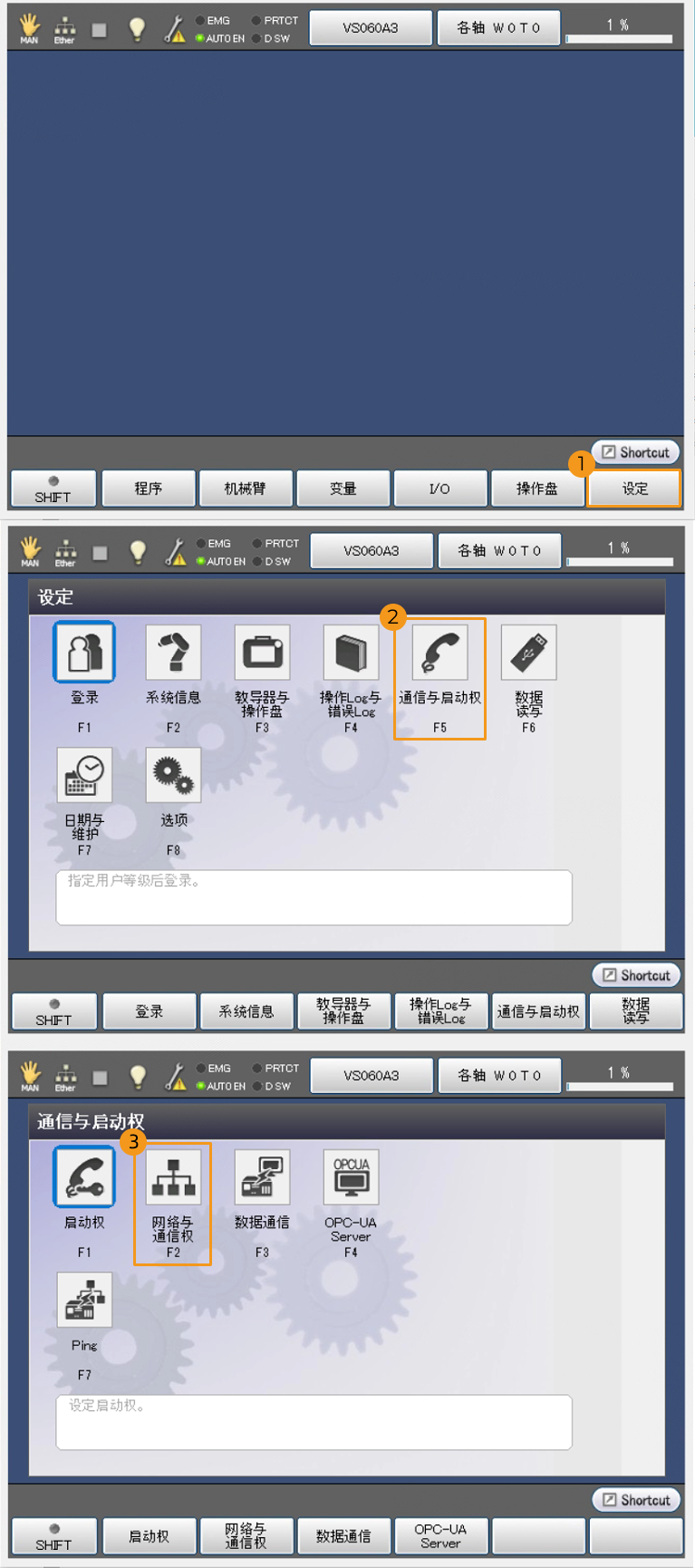
在示教器上,点击。
-
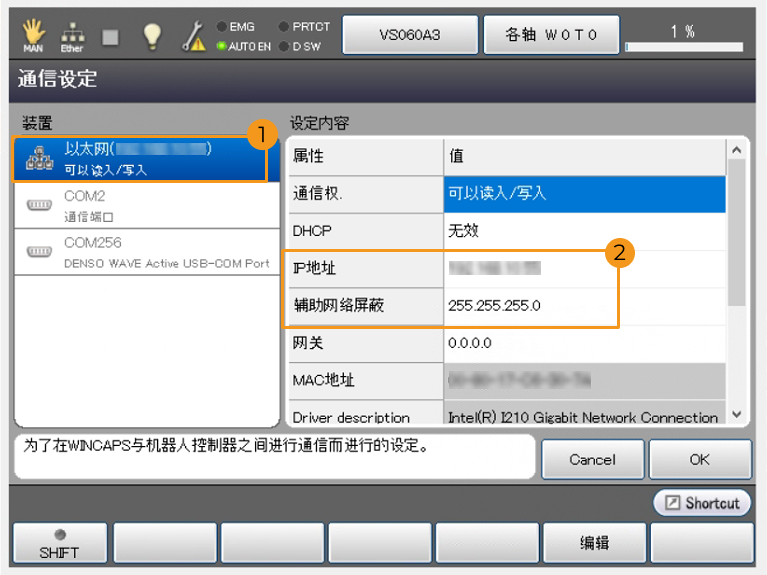
在“通信设定”窗口的“装置”面板,选择以太网,在“设定内容”面板查看IP地址和辅助网络屏蔽;确认机器人IP地址和工控机IP地址是否在同一网段。
-
如果机器人IP地址和工控机IP地址不在同一网段,请修改工控机IP地址。
-
录入工控机IP地址
-
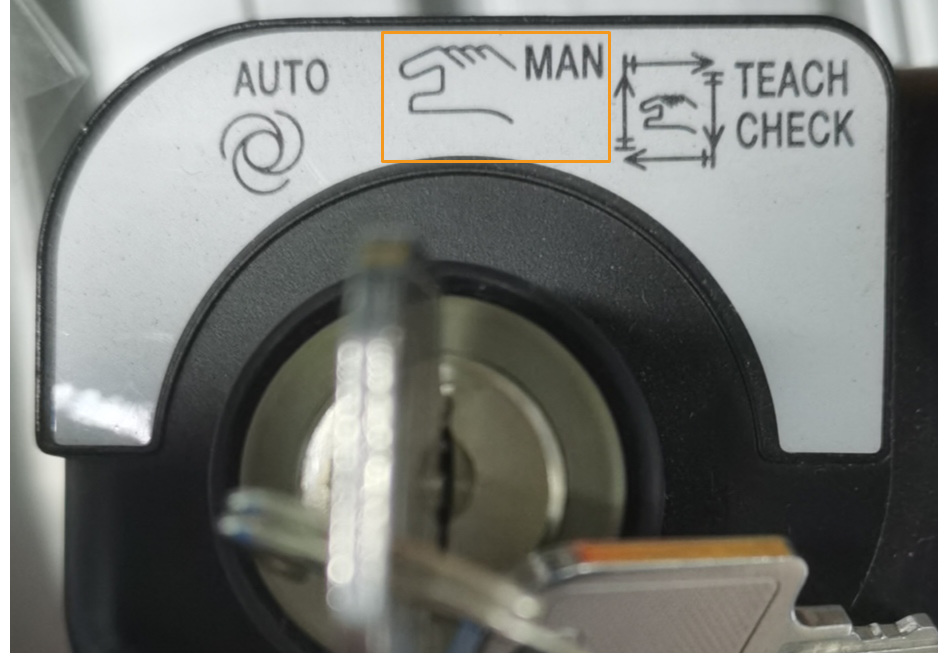
旋转示教器钥匙,使其指向 MAN(手动模式)。
-
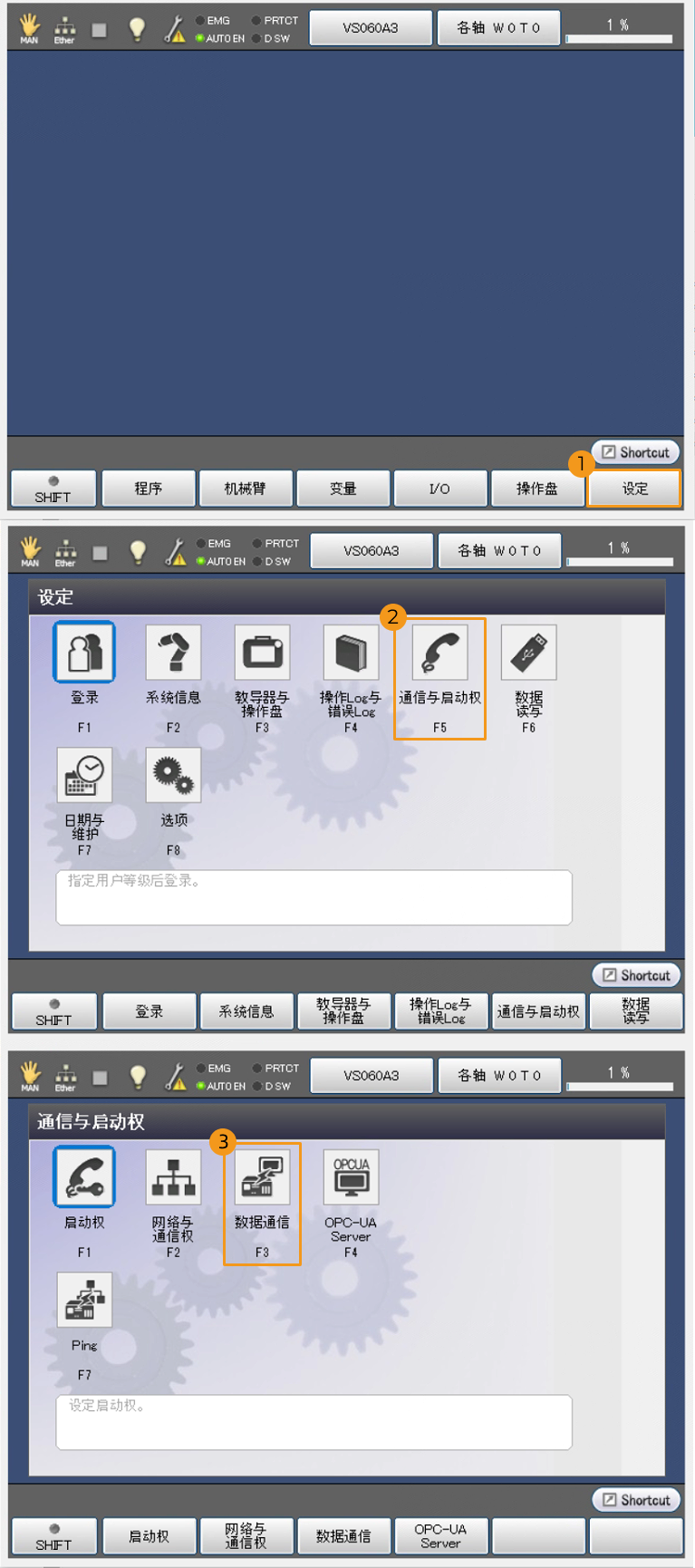
在示教器显示屏上,点击。
-
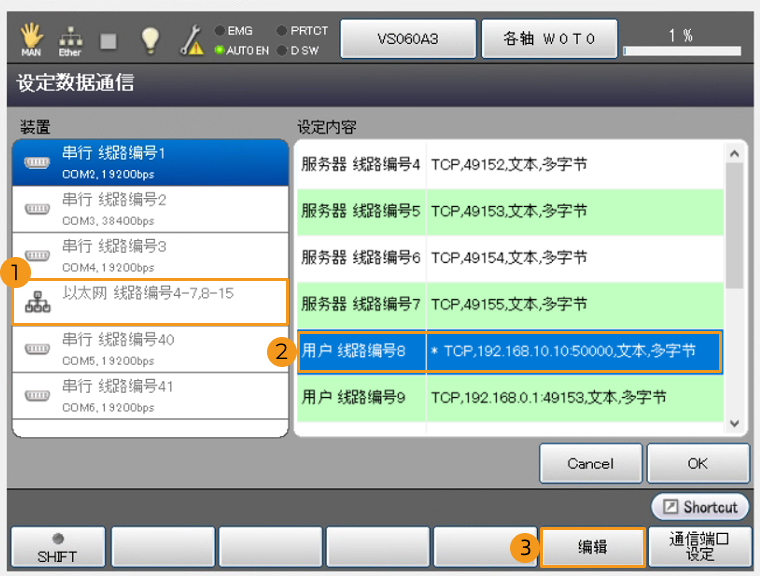
在“设定数据通信”窗口的“装置”面板,选择“以太网 线路编号4-7,8-15”,在“设定内容”面板,选择“用户 线路编号8”。点击编辑。
-
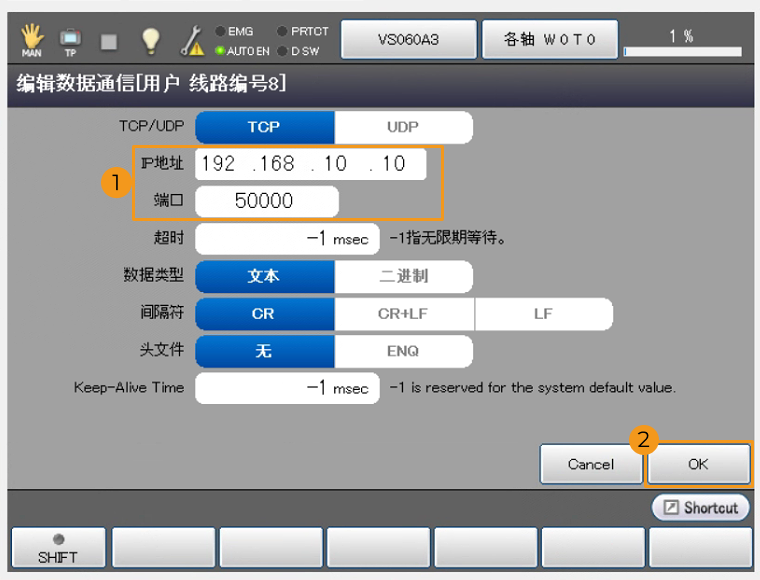
在弹出的窗口中,将IP地址修改为工控机IP地址,将端口修改为Mech-Vision的“机器人通信配置”窗口中设置的端口号。点击OK。
备份
-
将U盘插入机器人控制柜。

-
在示教器显示屏上,点击。
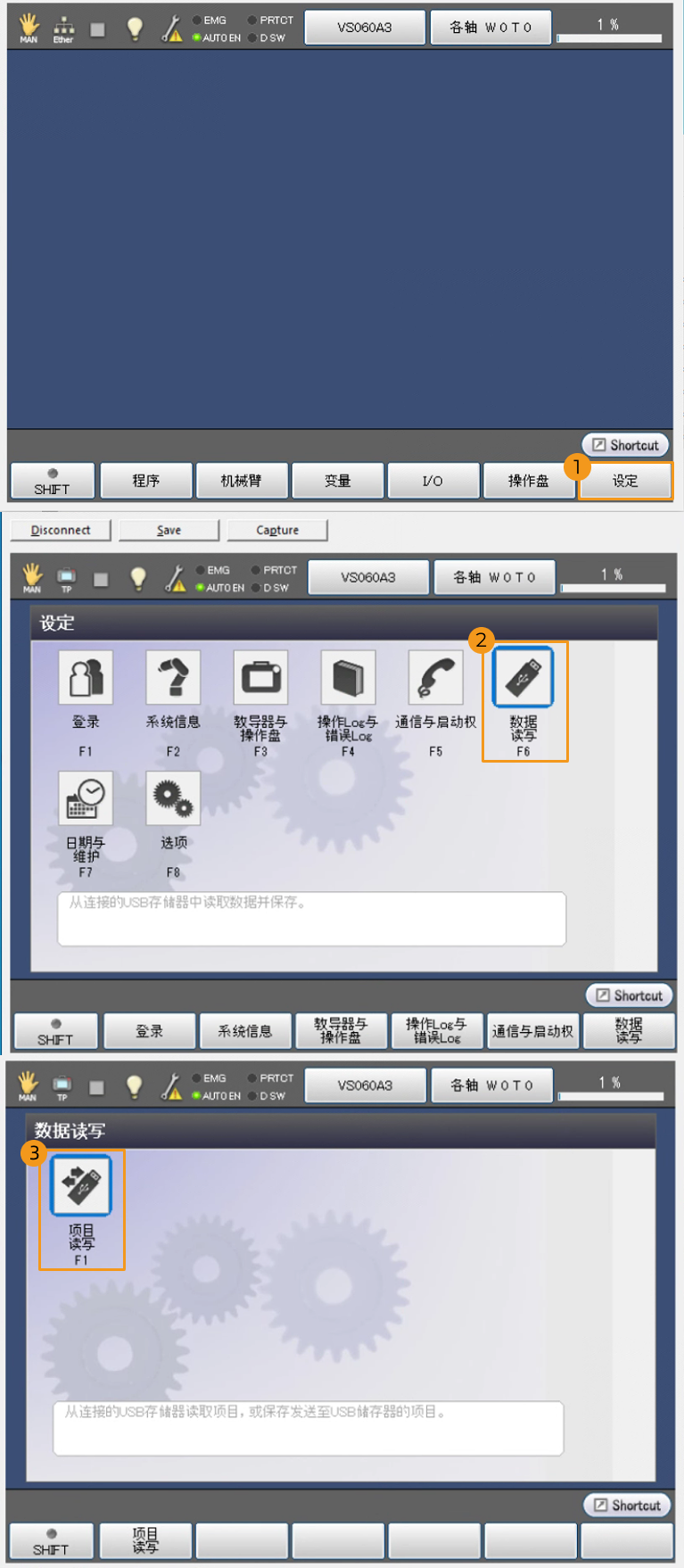
-
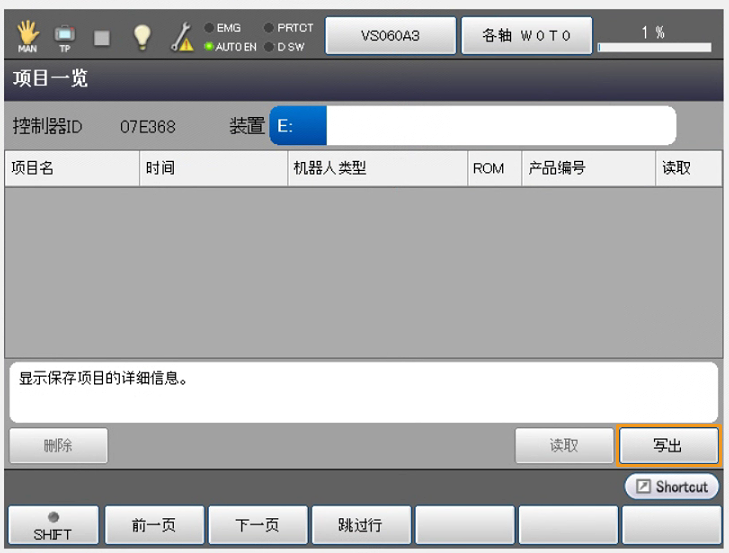
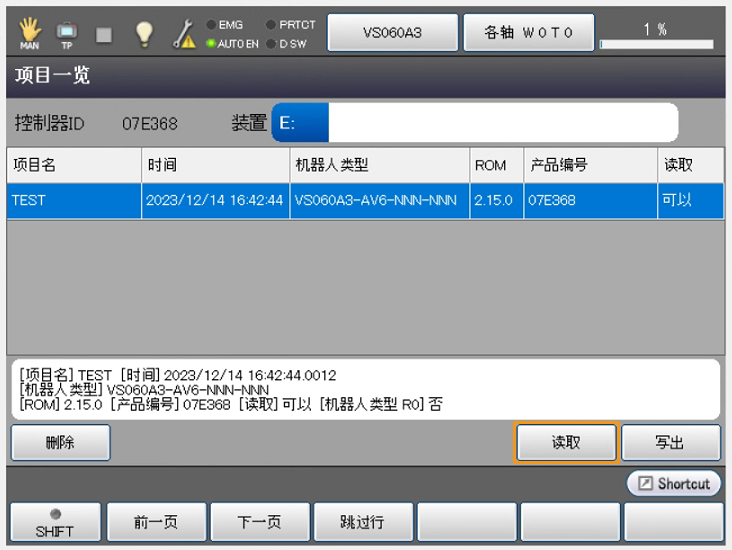
在“项目一览”窗口,点击写出。
-
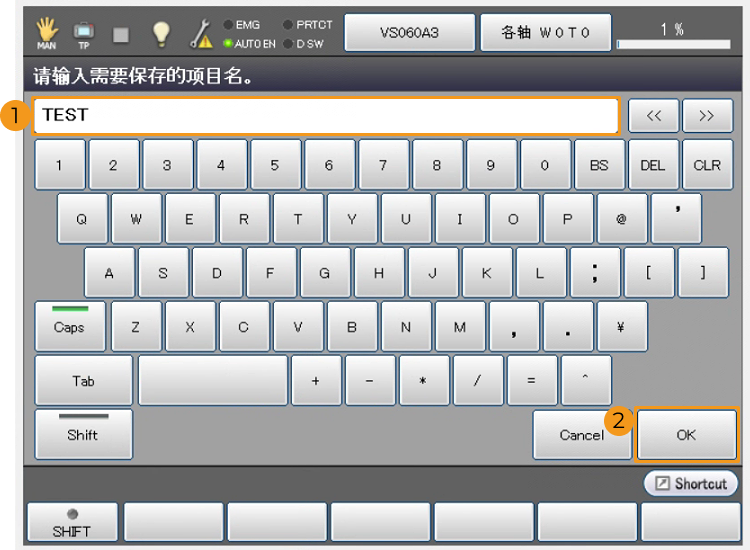
在提示“请输入需要保存的项目名”的窗口中,输入备份文件夹名称,然后点击OK。
-
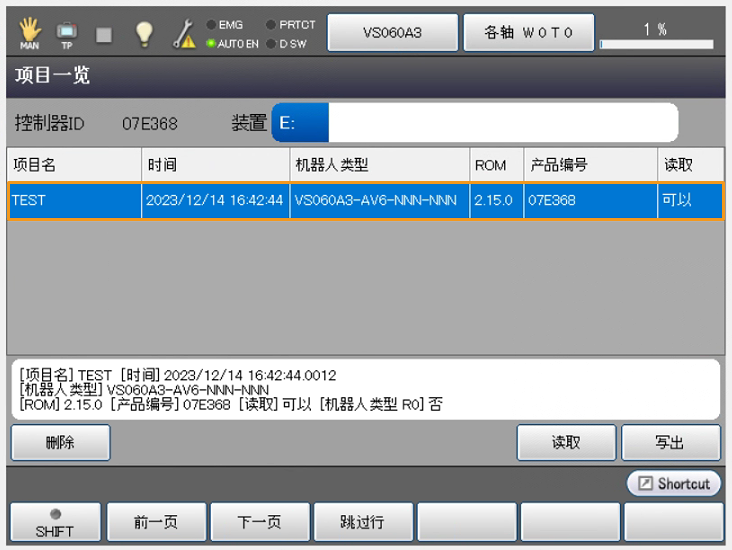
备份完成后,“项目一览”窗口中显示备份文件信息,其中项目名为上一步输入的备份文件夹名称。最后,安全拔出U盘。
设置“机器人通信配置”
-
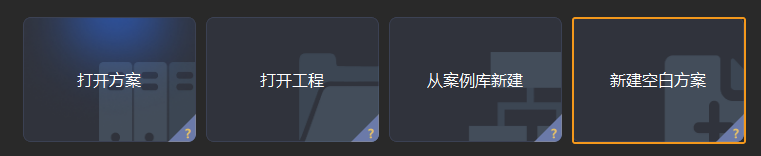
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
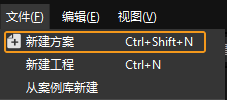
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
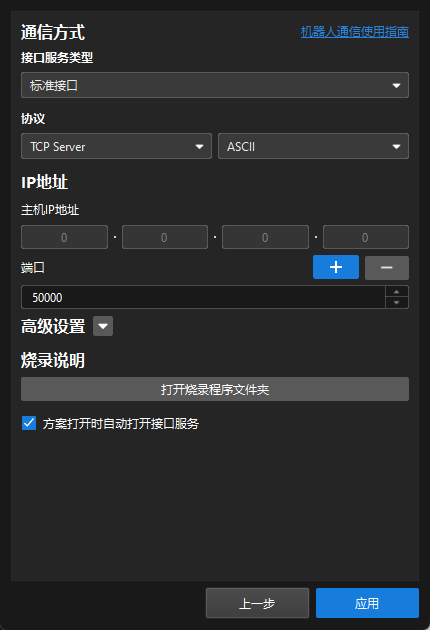
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 选择 ASCII。
-
端口号建议设置为50000或50000以上。确保设置的端口号未被其他程序占用。
-
在 烧录说明 下,单击 打开烧录程序文件夹。
后续烧录的文件将从此文件夹复制,请勿关闭文件夹窗口。 -
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
-
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

烧录文件至机器人
-
将U盘插入机器人控制柜。
-
在示教器的“项目一览”窗口,点击读取。
-
在弹出的“选择项目数据”窗口,选择程序,点击OK。

-
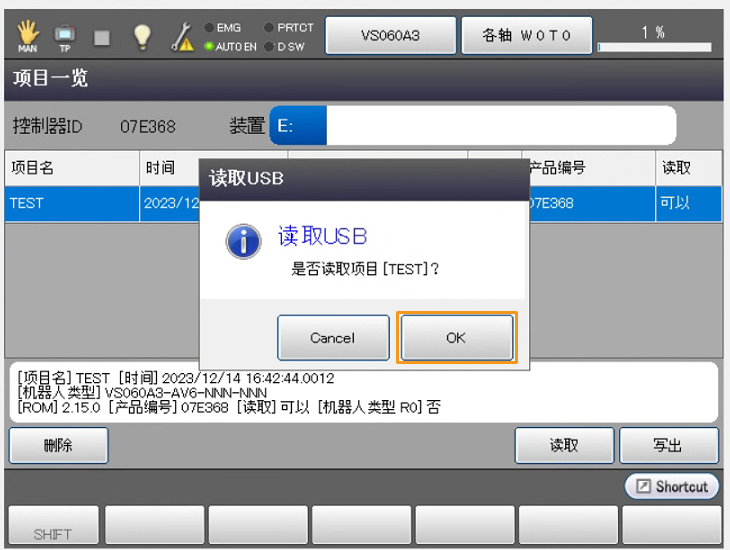
在弹出的“读取USB”对话框中,点击OK。
-
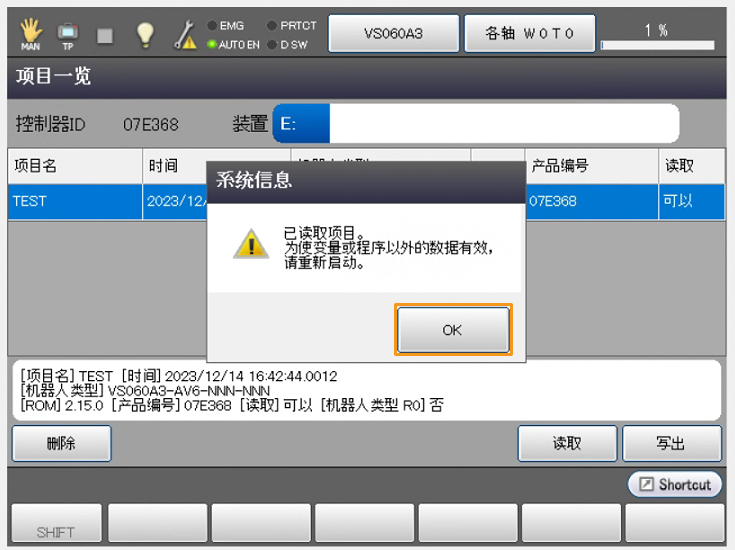
等待片刻。系统读取完成后,会弹出“系统信息”对话框。点击OK。
测试标准接口通信
在测试机器人与视觉系统之间的标准接口通信时,请先确认机器人通信配置已开启,然后在示教器上运行测试程序,尝试进行标准接口通信。
-
旋转示教器钥匙,使其指向 AUTO(自动模式)。

-
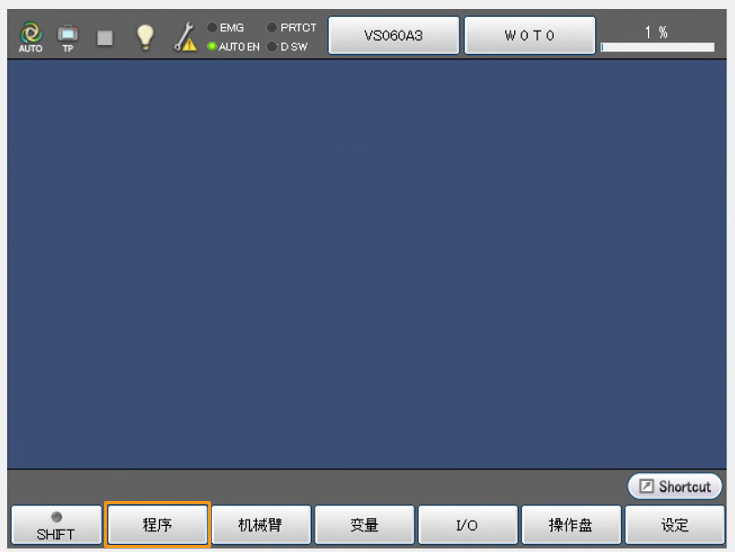
在示教器主页面,点击程序。
-
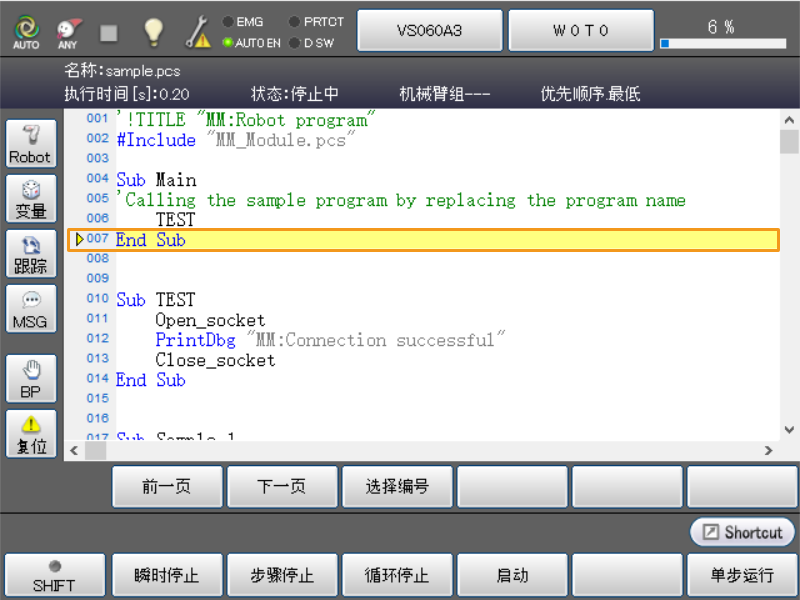
在程序目录中,选择 sample.pcs 程序。点击表示。

-
在程序界面,点击启动。

-
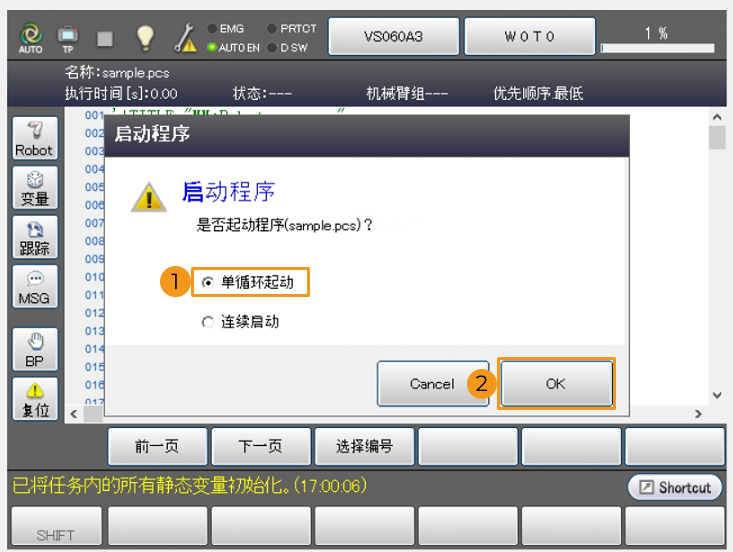
在弹出的“启动程序”对话框中,选择单循环起动,点击OK。
-
如果机器人与Mech-Vision成功建立标准接口通信,程序指针会停留在 End Sub 行。
-
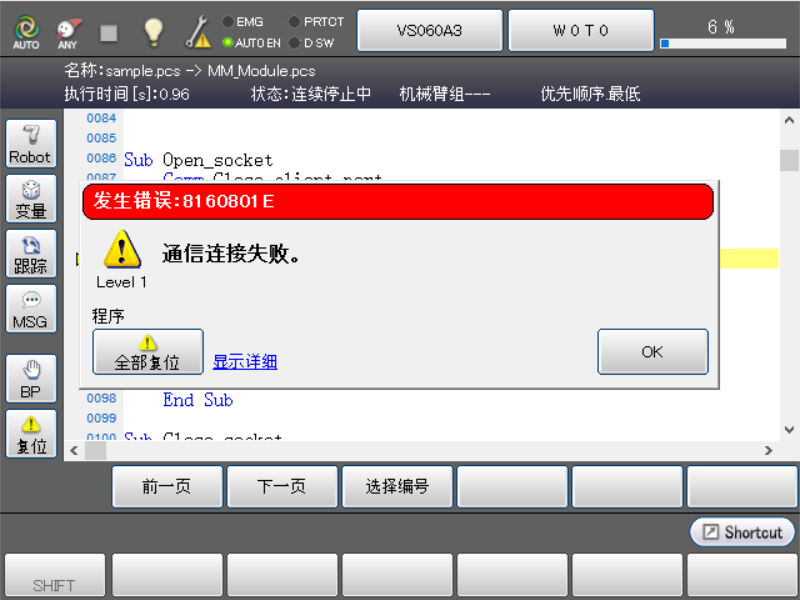
如果标准接口通信失败,示教器上会弹出报错信息,显示通信连接失败。请排查通信问题。