样例程序6:MM_S6_Viz_ErrorHandle
程序简介
功能说明 |
机器人触发Mech-Viz工程运行,并获取路径规划结果,然后根据状态码判断是否成功获取到规划路径。如果成功获取规划路径,则机器人执行抓取和放置操作;否则,机器人停止运行。 |
||
文件路径 |
Mech-Vision和Mech-Viz软件安装目录下
|
||
所需工程 |
Mech-Vision工程和Mech-Viz工程 |
||
使用前提 |
|
| 此样例程序仅是示例程序。用户需根据实际情况在此基础上进行修改,请勿直接使用该程序。 |
程序解读
以下为MM_S6_Viz_ErrorHandle样例程序的代码及相关解释说明。
| 与MM_S2_Viz_Basic样例相比,本样例仅新增了对不同错误状态码进行处理的功能(加粗部分的代码)。因此,下文不再重复解释与MM_S2_Viz_Basic样例相同部分的代码(详情请参考MM_S2_Viz_Basic样例说明)。 |
MODULE MM_S6_Viz_ErrorHandle
!----------------------------------------------------------
! FUNCTION: trigger Mech-Viz project and get planned path,
! handle errors according to status codes (if no point cloud
! in ROI, retry several times before exit loop)
! Mech-Mind, 2023-12-25
!----------------------------------------------------------
!define local num variables
LOCAL VAR num pose_num:=0;
LOCAL VAR num status:=0;
LOCAL VAR num toolid{5}:=[0,0,0,0,0];
LOCAL VAR num vis_pose_num:=0;
LOCAL VAR num count:=0;
LOCAL VAR num retry_cnt:=0;
LOCAL VAR num label{5}:=[0,0,0,0,0];
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL CONST jointtarget snap_jps:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget camera_capture:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS jointtarget jps{5}:=
[
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.2355,52.1281,-23.3996,0.5938,62.6295,-169.548],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[0,0,0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]],
[[11.1329,49.0771,-36.9666,0.5343,79.2476,-169.477],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]]
];
!define local tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
PROC Sample_6()
!set the acceleration parameters
AccSet 50, 50;
!set the velocity parameters
VelSet 50, 1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1",50000,300;
!move to image-capturing position
MoveL camera_capture,v1000,fine,gripper1;
!open socket connection
MM_Open_Socket;
RECAP:
!trigger Mech-Viz project
MM_Start_Viz 2,snap_jps;
!get planned path, 1st argument (1) means getting pose in JPs
MM_Get_VizData 1, pose_num, vis_pose_num, status;
!check whether planned path has been got from Mech-Viz successfully
IF status <> 2100 THEN
IF status = 2038 THEN
!no point cloud in ROI, add handling logic here
!self-adding then check retry counter
retry_cnt:=retry_cnt+1;
IF retry_cnt<3 THEN
!jump back to vision retry label if the number of retry times is less than 3
GOTO RECAP;
ELSE
!reset counter and exit loop if the number of retry times has reached 3
retry_cnt:=0;
GOTO END_LOOP;
ENDIF
ELSE
!add other error handling logic here
Stop;
GOTO END_LOOP;
ENDIF
ENDIF
!close socket connection
MM_Close_Socket;
!save waypoints of the planned path to local variables one by one
MM_Get_Jps 1,jps{1},label{1},toolid{1};
MM_Get_JPS 2,jps{2},label{2},toolid{2};
MM_Get_JPS 3,jps{3},label{3},toolid{3};
!follow the planned path to pick
!move to approach waypoint of picking
MoveAbsJ jps{1},v1000,fine,gripper1;
!move to picking waypoint
MoveAbsJ jps{2},v1000,fine,gripper1;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveAbsJ jps{3},v1000,fine,gripper1;
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
RETURN;
END_LOOP:
Stop;
ENDPROC
ENDMODULE上述样例程序代码对应的流程如下图所示。
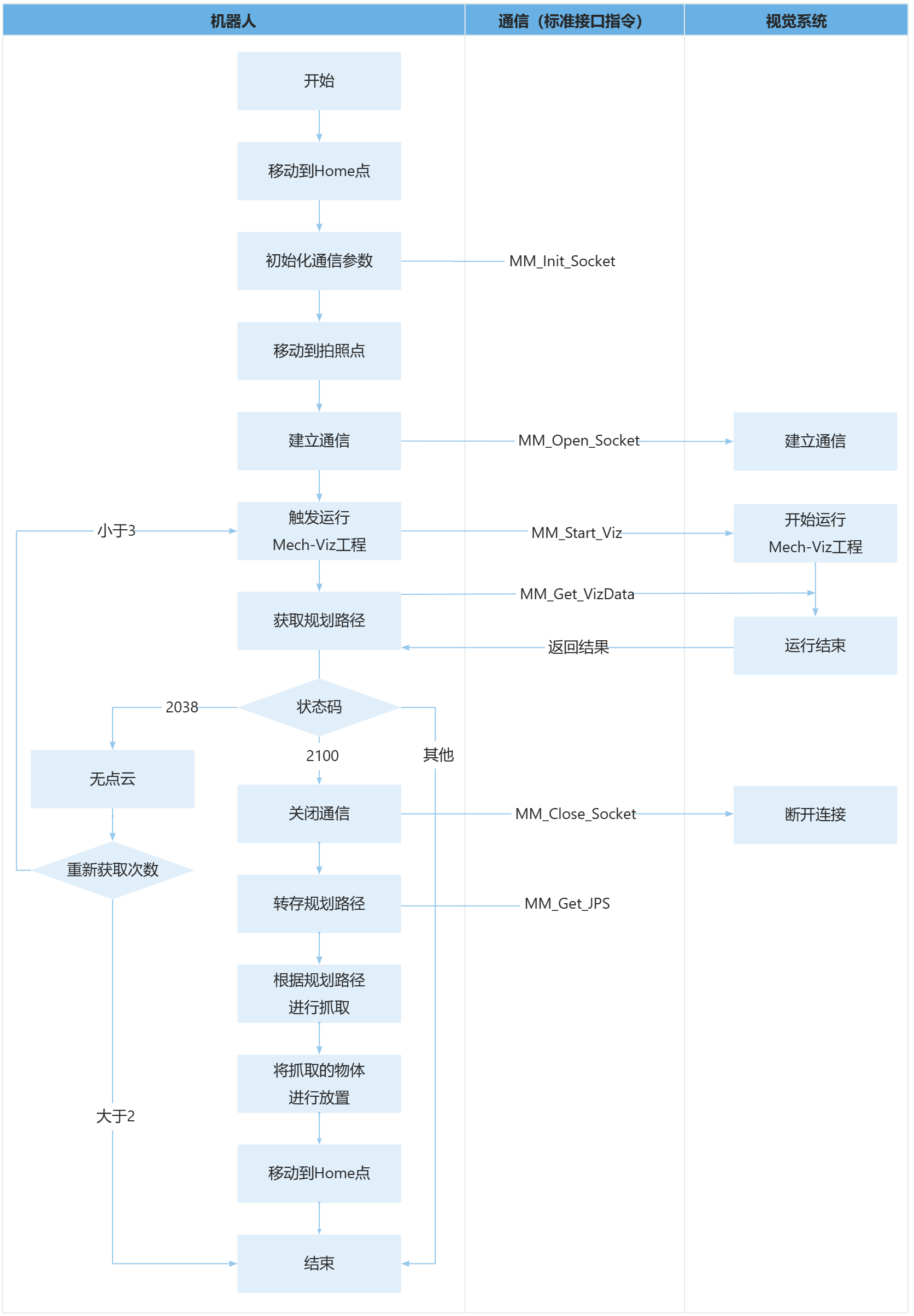
下表为处理不同状态码的逻辑解读。
| 流程 | 代码及说明 | ||
|---|---|---|---|
处理不同状态码 |
机器人在执行MM_Get_VizData指令后,会将指令执行的状态码保存至status变量。用户可根据具体状态码做相应的处理,如本例中的处理逻辑。
|