在机器人通信配置中,如何设置IP地址和端口?
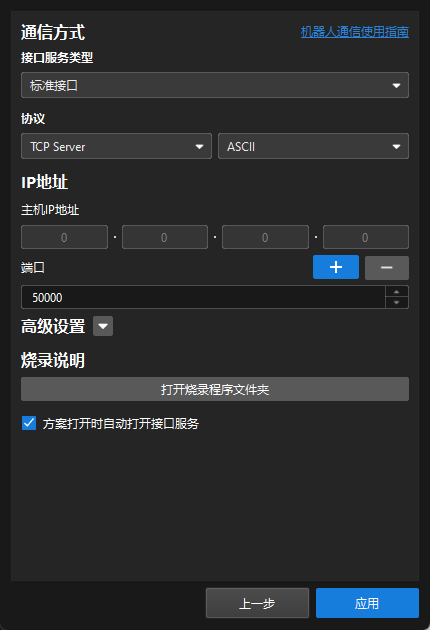
许多用户对机器人通信配置中的IP地址和端口不太了解,不清楚应该填写哪个设备的IP地址以及使用哪个端口,如下图所示。本文特此说明此处IP地址和端口的含义,具体如下表所示。
| 协议 | 视觉系统角色 | IP地址 | 端口 |
|---|---|---|---|
TCP Server |
服务端 |
0.0.0.0 |
自定义数字,用于提供给外部设备(机器人或PLC)进行连接。外部设备的标准接口程序中需要填写视觉系统所在工控机的IP地址,以及此处设置的端口号。 |
Siemens PLC Client |
客户端 |
PLC的IP地址 |
无 |
ETHERNET IP |
服务端 |
无 |
无 |
MODBUS TCP Slave |
服务端 |
0.0.0.0 |
自定义数字,用于提供给外部设备(机器人或PLC)进行连接。外部设备的标准接口程序中需要填写视觉系统所在工控机的IP地址,以及此处设置的端口号。 |
UDP Server |
不区分服务端/客户端 |
0.0.0.0 |
自定义数字,用于提供给外部设备(机器人或PLC)进行连接。外部设备的标准接口程序中需要填写视觉系统所在工控机的IP地址,以及此处设置的端口号。 |
Mitsubishi MC Client |
客户端 |
PLC的IP地址 |
PLC的端口号 |