样例程序6:MM_S6_Vis_Timer
程序简介
功能说明 |
PLC计算视觉节拍,即从触发Mech-Vision工程运行,到最后获取视觉结果所花费的时间。 |
文件路径 |
Mech-Vision和Mech-Viz软件安装目录下 |
所需工程 |
Mech-Vision工程 |
使用前提 |
| 此样例程序仅是示例程序。用户需根据实际情况在此基础上进行修改,请勿直接使用该程序。 |
程序解读
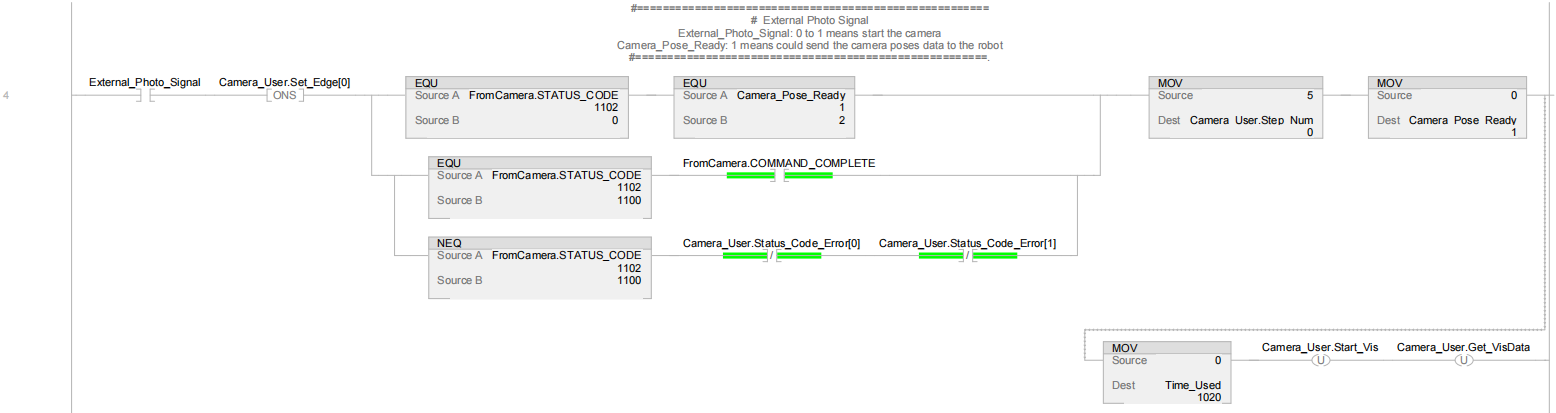
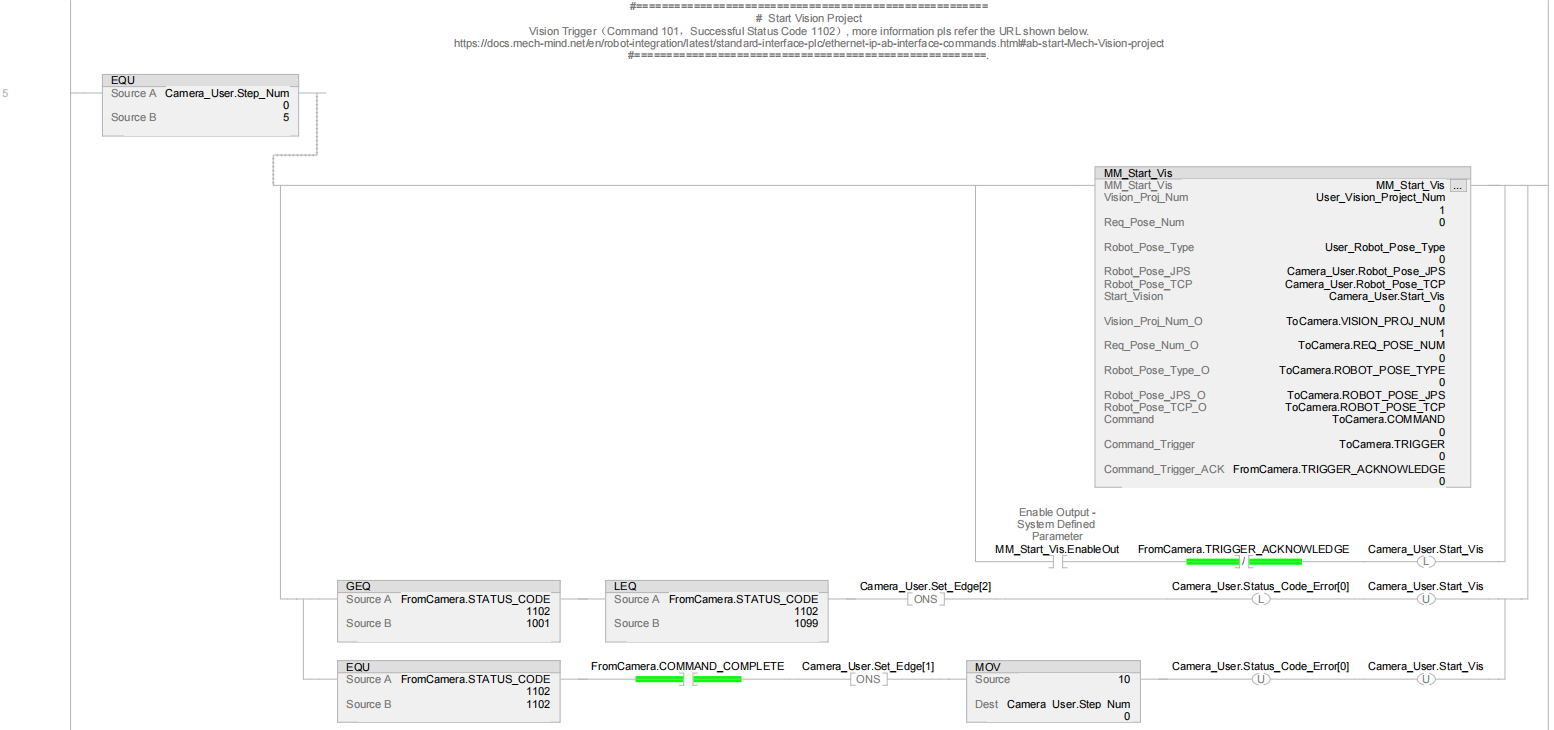
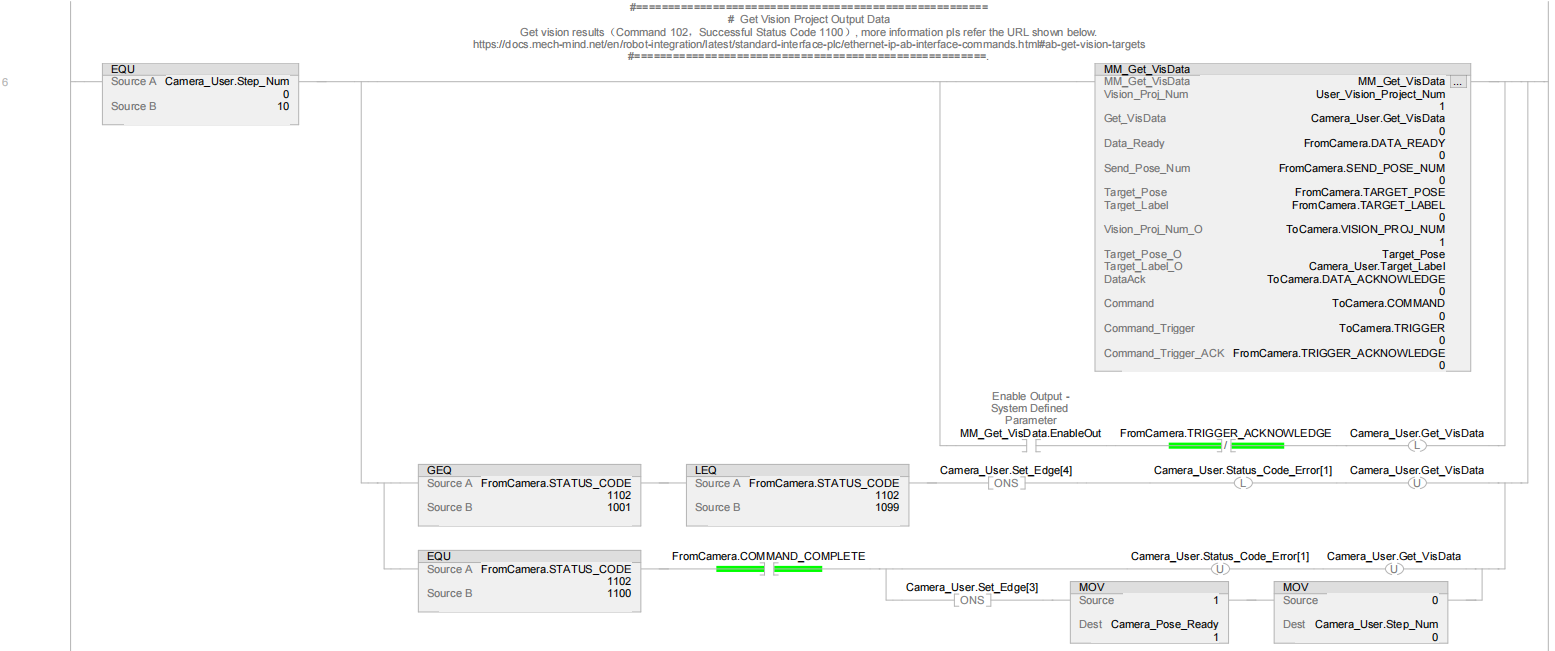
以下为MM_S6_Vis_Timer样例程序的梯形图及相关解释说明。
| 与MM_S1_Vis_Basic样例相比,本样例新增了计算视觉节拍的功能(Rung 7~9)。因此,下文不再重复解释与MM_S1_Vis_Basic样例相同部分的逻辑(详情请参考MM_S1_Vis_Basic样例说明)。 |







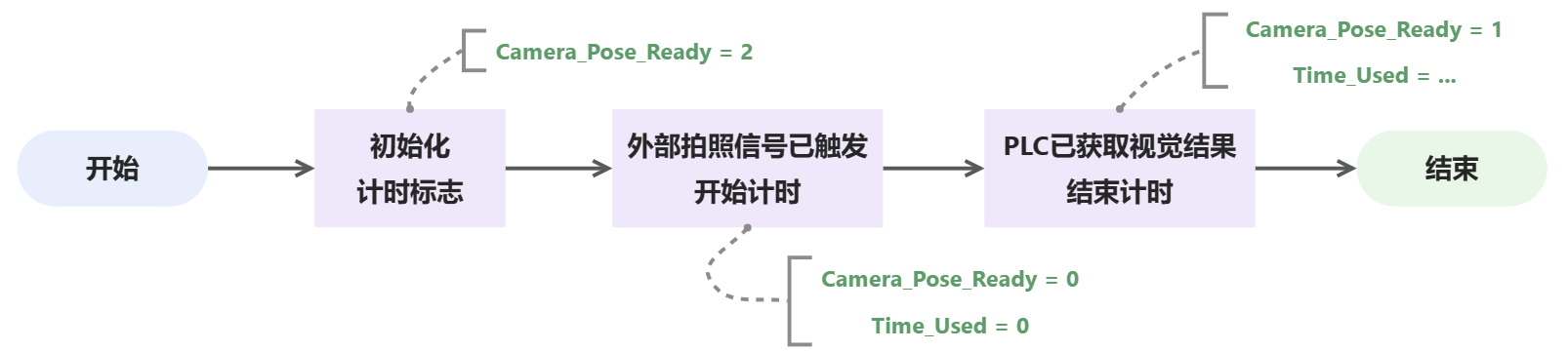
在上述样例程序梯形图中,计算视觉节拍对应的流程如下图所示。
下表为计算视觉节拍的逻辑解读。
|
关于AB PLC自带的常用基本指令,可参考常用指令说明。 |
| 流程 | 梯形图及说明 |
|---|---|
计算视觉节拍 |
Rung 7和8表示,通过两个TON接通延时计时器(pulse_10ms_1和pulse_10ms_2),产生10ms宽度脉冲pulse_10ms_1.DN。因此,pulse_10ms_1.DN的上升沿周期为10×2=20ms。
Rung 9: 通过Time_Used以20ms为单位累加计算Camera_Pose_Ready从0(外部拍照信号已触发)变为1(PLC已获取视觉结果)所花费的时间,即视觉节拍。 |