样例程序15:MM_S15_Viz_GetDoList
程序解读
以下为MM_S15_Viz_GetDoList样例程序的代码及相关解释说明。
| 与MM_S2_Viz_Basic样例相比,本样例仅修改了如下加粗部分的代码。因此,下文不再重复解释与MM_S2_Viz_Basic样例相同部分的代码(详情请参考MM_S2_Viz_Basic样例说明)。 |
NOP
'--------------------------------
'FUNCTION: trigger Mech-Viz
'project, then get planned path
'and gripper control signal using
'command 210
'Mech-Mind, 2023-12-25
'--------------------------------
'clear I50 to I69
CLEAR I050 20
'initialize p variables
SUB P071 P071
SUB P072 P072
SUB P073 P073
'move to robot home position
MOVJ C00000 VJ=50.00
'initialize communication
'parameters (initialization is
'required only once)
CALL JOB:MM_INIT_SOCKET ARGF"192.168.170.22;50000;1"
'move to image-capturing position
MOVJ C00001 VJ=50.00 PL=0
'open socket connection
CALL JOB:MM_OPEN_SOCKET
'trigger Mech-Viz project
CALL JOB:MM_START_VIZ ARGF"2;30"
'get planned path
CALL JOB:MM_GET_PLANDATA ARGF"0;3;51;52;53"
'check whether planned path has
'been got from Mech-Viz
'successfully
IFTHENEXP I053<>2100
'add error handling logic here
'according to different error
'codes
'e.g.: I053=2038 means no
'point cloud in ROI
PAUSE
ENDIF
'get gripper control signal list
CALL JOB:MM_GET_DOLIST ARGF"0;0"
'close socket connection
CALL JOB:MM_CLOSE_SOCKET
'save waypoints of the planned
'path to local variables one
'by one
CALL JOB:MM_GET_PLANPOSE ARGF"1;71;61;31"
CALL JOB:MM_GET_PLANPOSE ARGF"2;72;71;31"
CALL JOB:MM_GET_PLANPOSE ARGF"3;73;81;31"
'follow the planned path to pick
'move to approach waypoint of
'picking
MOVJ P071 VJ=50.00 PL=0
'move to picking waypoint
MOVJ P072 VJ=10.00 PL=0
'set gripper control signal when
'current waypoint is picking
'waypoint
CALL JOB:MM_SET_DOLIST ARGF"0"
PAUSE
'move to departure waypoint of
'picking
MOVJ P073 VJ=50.00 PL=0
'move to intermediate waypoint of
'placing
MOVJ C00002 VJ=50.00
'move to approach waypoint of
'placing
MOVL C00003 V=166.6 PL=0
'move to placing waypoint
MOVL C00004 V=50.0 PL=0
'add object releasing logic here,
'such as DOUT OT#(1) OFF
PAUSE
'move to departure waypoint of
'placing
MOVL C00005 V=166.6 PL=0
'move back to robot home position
MOVJ C00006 VJ=50.00
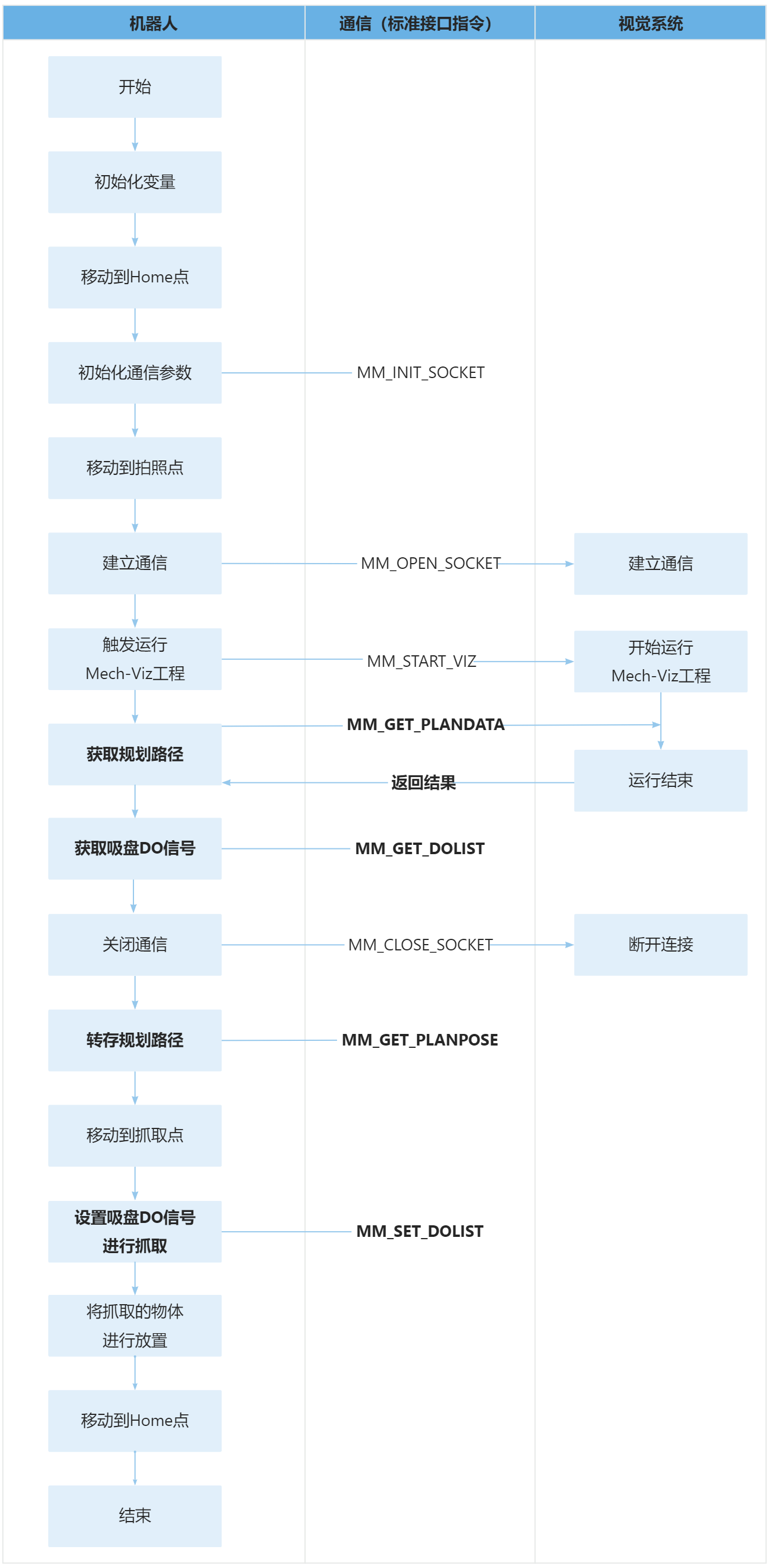
END上述样例程序代码对应的流程如下图所示。
下表是对加粗代码的逻辑解读。用户单击指令名称的超链接便可查看该指令的详细说明。
| 流程 | 代码及说明 | ||
|---|---|---|---|
获取规划路径 |
|
||
获取吸盘DO信号 |
|
||
转存规划路径 |
因此,“CALL JOB:MM_GET_PLANPOSE ARGF"1;71;61;31"”整条指令表示将第一个路径点的位姿、移动类型、末端工具编号、速度、视觉移动规划数据和自定义数据分别转存至指定变量。
|
||
移动到抓取点进行抓取 |
因此,上述语句表示,机器人在移动到抓取点(P072)后,通过MM_SET_DOLIST指令设置吸盘DO信号,从而完成抓取。 |