補正原理
生産過程において、ビジョンシステムが長時間稼働すると、温度変化に伴うカメラの温度ドリフトが発生することがあります。この現象は、ワーク認識の安定性やシステム精度に影響を及ぼす可能性があるため、適切なドリフト補正が必要となります。以下では、ビジョンシステムのドリフト補正の基本原理について説明します。
カメラの温度ドリフトとは?
カメラの温度ドリフトとは、温度変化によりカメラ内部の光学部品、電子部品、機械構造などが熱膨張や収縮といった物理的影響を受ける現象です。これにより、カメラの撮影性能が変化することがあります。この変化には、焦点距離のずれ、画像歪みの増加、ピクセル位置の移動などが含まれ、結果としてカメラの精度やワーク認識の安定性に影響を与えます。
ドリフト補正方法
Mech-Mindが提供するドリフト補正ソリューションは、キャリブレーションボールの位置姿勢の変化を監視してビジョンシステムのドリフトを補正します。
ロボットの繰り返し精度が正常であり、カメラとキャリブレーションボールがしっかりと固定されている前提で、定期的にキャリブレーションボールの位置姿勢を取得する際、位置姿勢に変化があった場合、それはビジョンシステムの精度にドリフトが発生したことを示します。この場合、カメラを使用してワークを認識すると、誤ったワークの位置が取得され、把持に影響を与えることになります。
この時、キャリブレーションボールの位置姿勢の変動量をビジョンシステムの精度ドリフト程度を評価する指標として使用することで、ドリフト値を補正し、正確なワーク認識結果を得ることができます。これにより、ロボットが安定してワークを把持できるようになります。
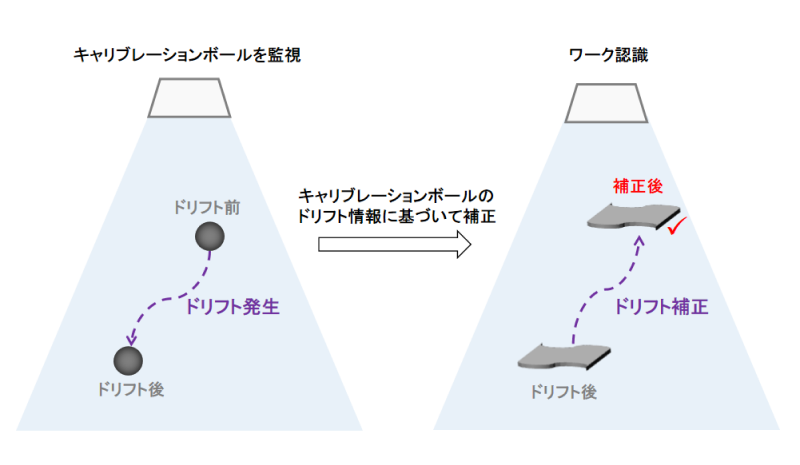
下図に示すように、左図はカメラがドリフト前後で取得したキャリブレーションボールの位置姿勢を示し、これを基にドリフト補正データを生成します。右図は、生成された補正値を使用し、ドリフトを補正した結果を示します。