キャリブレーションボールの取扱説明書(ETH)
以下は、ドリフト自動補正(ETH)に使用されるキャリブレーションボールの取扱説明書です。
梱包内容一覧
キャリブレーションボール関連の梱包内容は下表の通りです。
|
| 番号 | 部品 | イメージ図 |
|---|---|---|
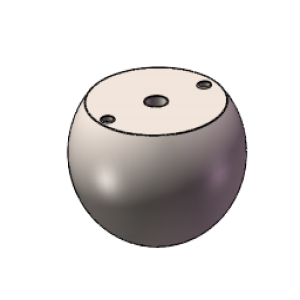
1 |
キャリブレーションボール(直径 60 mm) × 1 |
|
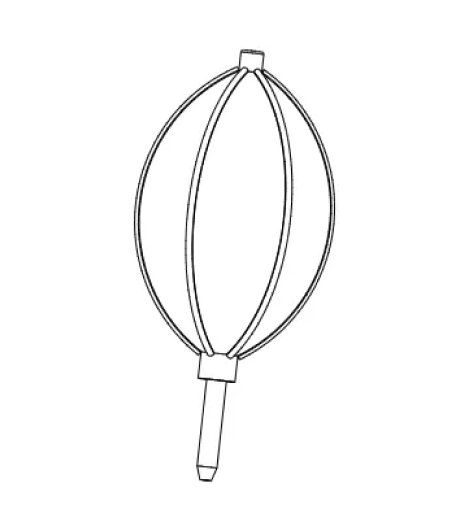
2 |
手動式エアブロワー × 1 |
|
3 |
|
|
キャリブレーションボールの技術仕様は下表の通りです。
| 仕様 | イメージ図 |
|---|---|
キャリブレーションボール × 3
|
|
梱包に入っているボルトとピンの長さが適切でない場合は、下表を参照してボルトとピンを自分で用意する必要があります。
| 番号 | 仕様 | イメージ図 | その他の説明 |
|---|---|---|---|
1 |
12.9強度 M8 ボルトセット × 1
|
|
キャリブレーションボールの中心にあるねじ穴と組み合わせて使用します。 |
2 |
直径6mmの円柱状ピン× 2
|
|
キャリブレーションボールの両側にあるピン穴と組み合わせて使用します。 |


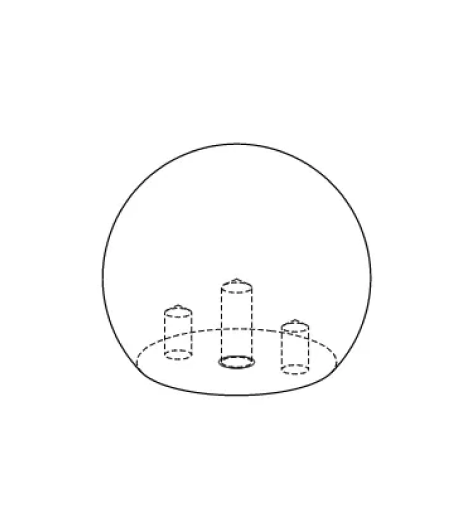
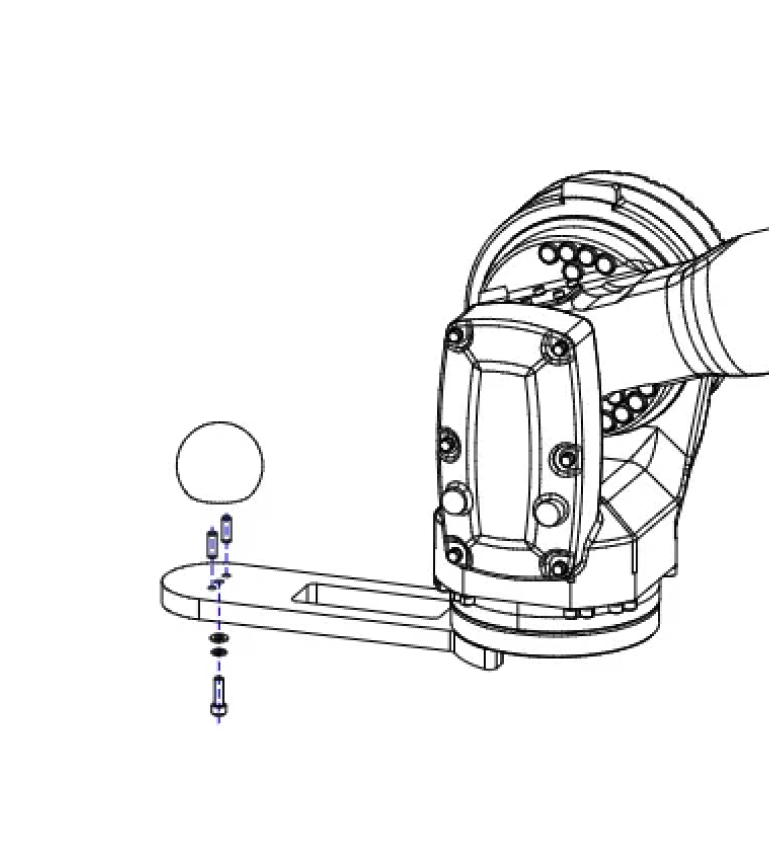
設置図
下図のように、ボルトとピンを使用して、キャリブレーションボールをロボット先端(ロボットハンドやフランジなど)に取り付けます。
設置上の注意
キャリブレーションボードを設置する前後で、以下の点に注意してください。
-
設置前
-
生産環境内に異物(粉塵、溶接スラグなど)が飛散する可能性がある場合、キャリブレーションボードに保護カバーを設置してください。
-
キャリブレーションボールに触れる際は、必ず防塵手袋を着用してください。
-
-
設置時
-
ボルトには接着剤を塗布することを推奨します。
-
接着剤の選択:ネジロック剤の使用を推奨します。
-
接着剤の塗布場所:ネジ山の締め付け箇所。
-
接着剤の量:接着剤がネジ溝から溢れないようにし、ボルトを持ち上げた際に接着剤が滴らないようにしてください。
-
-
ボルトでキャリブレーションボールを固定する際、ボルトがナットから露出する長さはボルト径の約0.3倍であることを推奨します。
-
カメラ撮影時にキャリブレーションボールが遮られないようにしてください。
-
ロボットがキャリブレーションボードを搭載した状態で、できるだけ多くのワーク位置に到達できるようにしてください。
-
ロボットが大きなまたは長いハンドを搭載してキャリブレーションボールの撮影経路点に移動する場合、ハンドがキャリブレーションボール周囲の物体と衝突しないように注意する必要があります。
-
-
設置後
-
設置後、ボルトと接触面にマーカーで印をつけて、キャリブレーションボールが緩んでいないか確認できるようにしてください。
-
メンテンナンス保守
取得されたキャリブレーションボールの位置姿勢が正確で信頼できることを確保するために、毎日キャリブレーションボールに対して以下の確認を行うことをお勧めします。
緩みの確認と対処
緩みの確認
-
目視でキャリブレーションボールの表面を確認し、傷、へこみ、汚れ、またはその他の物理的な損傷がないか確認します。
-
ボルトと接触面のマーキングを確認し、以下の問題がないかをチェックしてください。
-
マーキングがまだはっきり見えるかどうか。
-
マーキングがずれていたり破損していないか。
-
|
マーキングの状態がボルトの緩みの有無を示すため、異常が発見された場合は記録し、担当者へ報告してください。 |
緩みの対処
キャリブレーションボールに緩みや位置ずれが発見された場合、以下の手順に従って操作してください。
-
キャリブレーションボールをしっかりと再固定し、緩みの原因を特定して解決します。
-
ロボットの自動補正プログラムを実行し、キャリブレーションボールの位置姿勢を再取得してドリフト補正データを生成します。
-
ロボットがすべてのワークを正常に把持できるかどうかをテストします。
-
すべてのワークを正常に把持できる場合、操作を終了します。
-
すべてのワークを正常に把持できない場合、ドリフト自動補正機能を再設定する必要があります。
ただし、再設定する前に、ドリフト自動補正機能がない状態でロボットがワークを正常に把持できるかを確認する必要があります。
この場合、一時的にドリフト自動補正機能を無効にします。具体的には、ビジョンプロジェクト内の「出力」または「経路計画」ステップで、「ドリフト自動補正」パラメータのチェックを外します。その後、ロボットがワークを正常に把持できるかをテストします。
-
すべてのワークを正常に把持できる場合、ドリフト自動補正機能を再設定するだけで問題ありません。
-
ワークを正常に把持できない場合、ロボットの把持精度が正常であることを確認してください(例: ティーチング法を使用して把持位置姿勢を再設定する)。その後、ドリフト自動補正機能を再設定します。
-
-
ほこりの確認と対応
キャリブレーションボール表面にほこりがないかを確認し、見つかった場合は以下の手順で清掃を行ってください。
-
準備作業:防塵手袋を着用し、キャリブレーションボールの表面に直接触れないようにします。指紋や油汚れなどが残らないように注意します。
-
初期清掃:手動式エアブロワーを使用して、キャリブレーションボールの表面のほこりや微粒子、その他の浮遊した汚れを軽く吹き飛ばします。
-
無塵白布での拭き取り:無塵白布を使用して、キャリブレーションボールの表面を軽く拭き取ります。布にほこりが付いていないことを確認し、摩擦による傷が付かないようにします。
-
再度ブロワーの使用:再度手動式エアブロワーを使用して、拭き取り後のキャリブレーションボールの表面を清掃し、微細なほこりや繊維が残らないようにします。
-
最終確認:キャリブレーションボールの表面に汚れやほこりが完全に除去され、傷がないことを確認します。
油汚れの確認と対応
キャリブレーションボール表面に油汚れがないか確認し、見つかった場合は以下の手順で清掃を行ってください。
-
準備作業:防塵手袋を着用し、キャリブレーションボールの表面に直接触れないようにします。指紋や油汚れなどが残らないように注意します。
-
初期清掃:少量の無水エタノールを含ませた不織布を使用して、キャリブレーションボールの表面を軽く拭き取ります。
-
不織布での拭き取り:初期清掃後、清潔な不織布で油汚れの跡をさらに拭き取ります。
-
洗剤を使用した清掃:上記の手順を行っても表面に油汚れが残っている場合は、洗剤でキャリブレーションボール表面を洗浄します。その後、キャリブレーションボールの表面を吹き乾かすか、自然乾燥させます。
-
最終確認:キャリブレーションボールの表面に汚れやほこりが完全に除去され、傷がないことを確認します。