3D Fine Matching Lite
Function
This Step is a lite version of 3D Fine Matching, in which the parameter configuration can be more intuitive.
This Step accurately matches the point cloud model and the scene point cloud and outputs the pose of the target object.
Usage Scenario
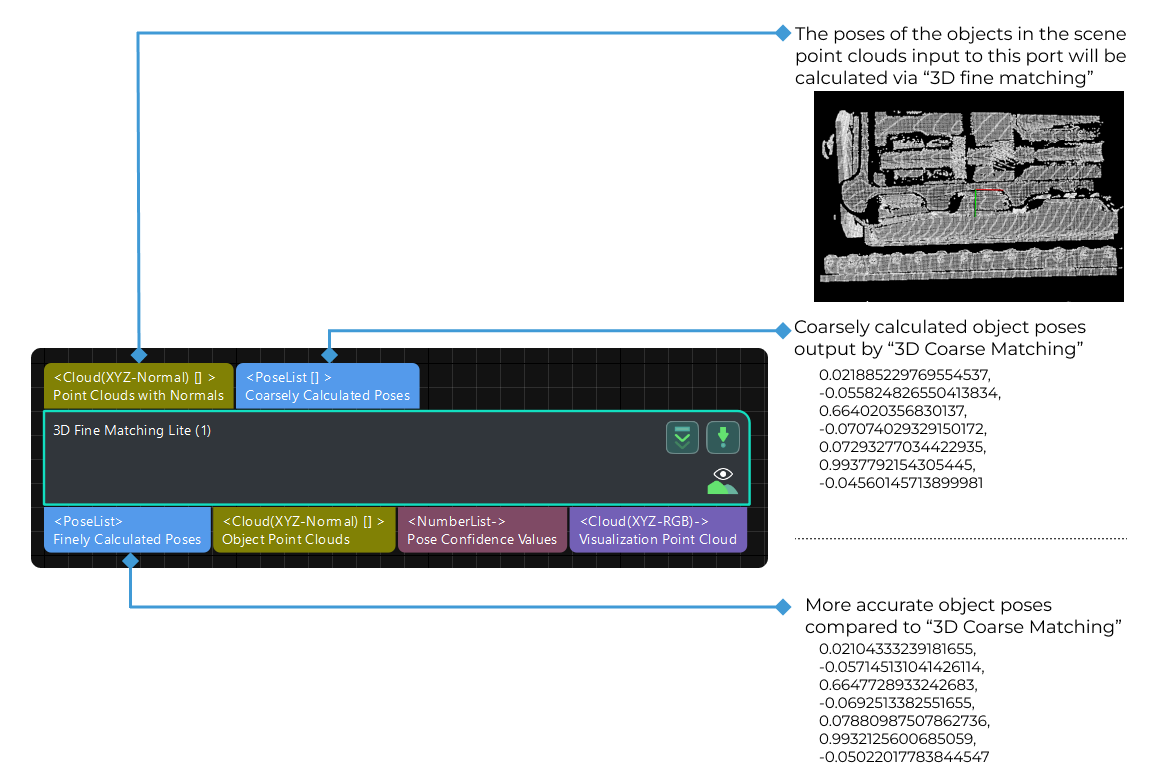
The 3D Coarse Matching or 3D Coarse Matching V2 Step should be used before this Step to output the original candidate poses. Then, this Step will match the original poses more accurately and output the accurately calculated object poses.
Parameters
Parameter Tuning Level
Parameter description: This parameter is used to select the tuning level of the parameters. The parameters in different tuning levels are different.
Value list: Basic and Advanced
Default value: Basic
Tuning recommendation: Select the parameter tuning level according to your need.
Basic Parameter Tuning Level
Model Settings
- Model Selection
-
Parameter description: This parameter is used to select the point cloud model file.
Tuning instruction: Click
 and select an available point cloud model file in the drop-down list. Please refer to Matching Model and Pick Point Editor for how to make a point cloud model file.
and select an available point cloud model file in the drop-down list. Please refer to Matching Model and Pick Point Editor for how to make a point cloud model file.
Matching Method Settings
- Matching Mode
-
Parameter description: This parameter is used to select between Edge Matching and Surface Matching modes.
Value list: Surface matching, Edge matching.
-
Surface Matching: Use the object’s surface point cloud for point cloud model matching.
-
Edge Matching: Use the object’s edge point cloud for point cloud model matching.
Default value: Surface matching.
Tuning recommendation: When the surface of the object has obvious recognizable features (such as crankshafts, rotors, and steel rods), it is recommended to use surface matching. You should create a point cloud model that represents the surface features of the object. When the object is relatively flat and shows clear and regular edge features under the camera (such as panels, track pads, connecting rods, and brake discs), it is recommended to use edge matching. You should create a point cloud model that represents the edge features of the object.
-
|
The point cloud model you select should correspond with the Matching Mode in use. For example, if the matching mode is Surface matching, you should select a surface point cloud model in Model Settings. |
- Deviation Correction Capacity
-
Parameter description: This parameter is used to set the intensity of the deviation correction to the matching result from 3D Coarse Matching or 3D Coarse Matching V2. The greater the deviation correction capacity is, the more likely the coarsely matched poses can be corrected to the accurately matched poses. Please note that an excessive deviation correction capability may lead to a loss of matching accuracy.
Value list: Small, Medium, and Large.
Default value: Small (applicable to most cases).
Tuning recommendation: When there is a relatively large deviation of the matching result, please adjust the Deviation Correction Capacity first. If the deviation is too large to be corrected by this parameter, please adjust the parameters in the 3D Coarse Matching or 3D Coarse Matching V2 Step.
- Operation Approach
-
Parameter description: This parameter specifies the operation approach of the matching process. The operation approach determines the relationship between the matching accuracy and matching speed. The higher the matching accuracy is, the longer the time required is.
Value list: High speed, Standard, High accuracy, and Extra high accuracy.
Default value: Standard.
Tuning recommendation: Please select the operation approach according to the actual requirement.
Validation Settings
- Confidence Threshold
-
Parameter description: This parameter is used to determine whether the matching result is valid. If the confidence of the matching result is above the threshold, the matching result is valid. The higher the confidence value is, the more accurate the matching result is.
Default value: 0.300
- Only Consider Visible Surface of Model
-
Parameter description: This parameter is used to determine whether to only consider the visible part of the surface point cloud model in the matching process. You should set this parameter when the matching mode is Surface Matching. Once this parameter is selected, only the visible part of the surface point cloud model will be considered, which facilitates the calculation and produces a more reasonable matching confidence.
Default value: Unselected.
Tuning recommendation: It is recommended to select this parameter for object models that have parts not visible to the camera under a viewing angle, such as the complete point cloud model of a cylindrical object. For object models that are completely visible from the same viewing angle, such as the surface point cloud model of the upper side of a brake disc, this parameter can be ignored.
- Result Validation Degree
-
Description: This parameter is used to select the degree of strictness applied when validating the matching results.
Default value: Standard.
Value list: Low, Standard, High, Ultra-high, Compatibility, Custom.
Tuning recommendation: In general, “Standard” is recommended. When the point cloud model is highly similar to the scene point cloud, a higher result validation degree can be selected.
Output Settings
- Maximum Number of Detected Poses in Each Point Cloud
-
Parameter description: This parameter sets the maximum number of output results in a single point cloud.
Default value: 1
Tuning instruction: If a single point cloud has multiple matching results, the results will be sorted in descending order according to the scores, and then the results with the highest scores will be output according to this parameter.
Advanced Parameter Tuning Level
Please refer to 3D Fine Matching.