Transform Poses
Function
This Step can transform poses from one reference frame to another, or transform within its own reference frame according to the reference pose.
Usage Scenario
This Step is usually used to transform poses between camera reference frame and robot reference frame.
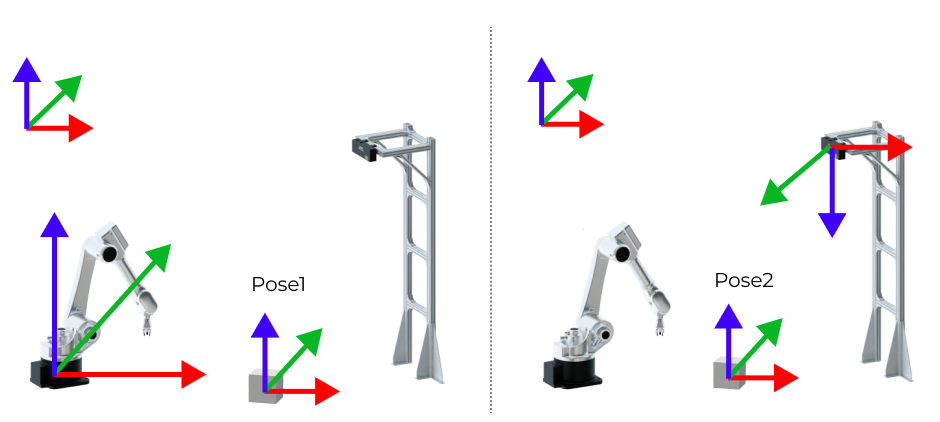
If you are using a truss robot, please use the Transform Poses for Truss Step.
Parameter Description
Visualization Settings
- Show Point Cloud In Selected Frame
-
Description: Display point cloud under the robot reference frame or the camera reference frame.
Default setting: Robot Coordinate.
Options: Robot Coordinate, Camera Coordinate.
Instruction: When this parameter is set to Robot Coordinate, the Debug Output panel will display the visualized output under the camera reference frame; when it is set to Robot Coordinate, the panel will display the visualized output under the robot reference frame. Please refer to the tuning example for the corresponding result.
This parameter will appear only when the scene point cloud is set in the project.
-
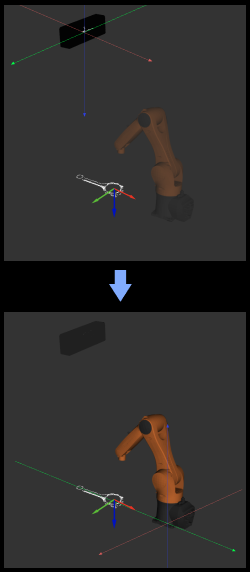
Under the Robot Coordinate, the Debug Output panel is black, and you need to adjust the view to show the point cloud and coordinates.
-
Under the Camera Coordinate, the Debug Output panel only shows the point cloud, and you need to adjust point cloud orientation to show the coordinates.
-
- Pose Type to Visualize
-
Parameter description: This parameter is used to select the pose type to visualize.
Default setting: After.
Options: Before, After, and All.
Instruction: Select an appropriate option according to actual needs. Please refer to the tuning example for the corresponding result.
Transformation Settings
- Transformation Type
-
Parameter description: This parameter is used to select the type of pose transformation.
Default setting: CameraToRobot.
Options: CameraToRobot, RobotToCamera, AllWithFrst, FirstWithAll, and UseCorrespondenceInput.
Instructions:
-
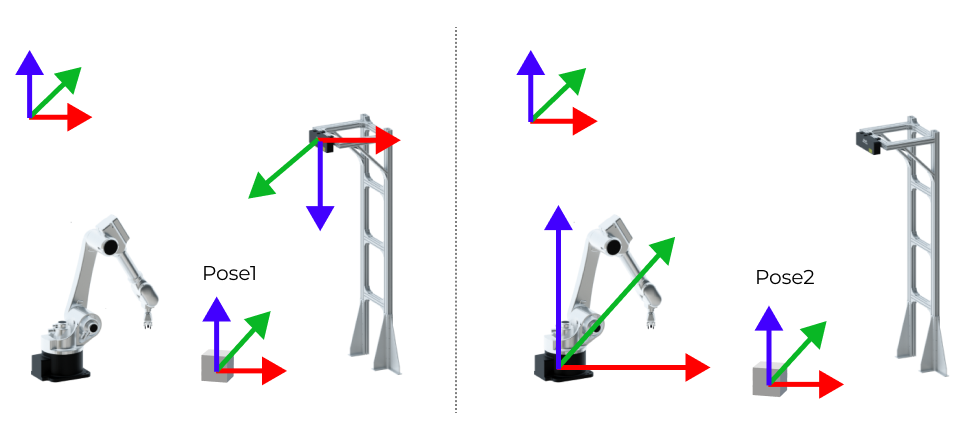
CameraToRobot: Assuming that the object pose in the camera reference frame is Pose 1, when the transformation type is CameraToRobot, the transformed pose Pose2 in the robot reference frame will be output. Please refer to the tuning example for the corresponding result.
-
RobotToCamera: Assuming that the object pose in the robot reference frame is Pose 1, when the transformation type is RobotToCamera, the transformed pose Pose2 in the camera reference frame will be output. Please refer to the tuning example for the corresponding result.
-
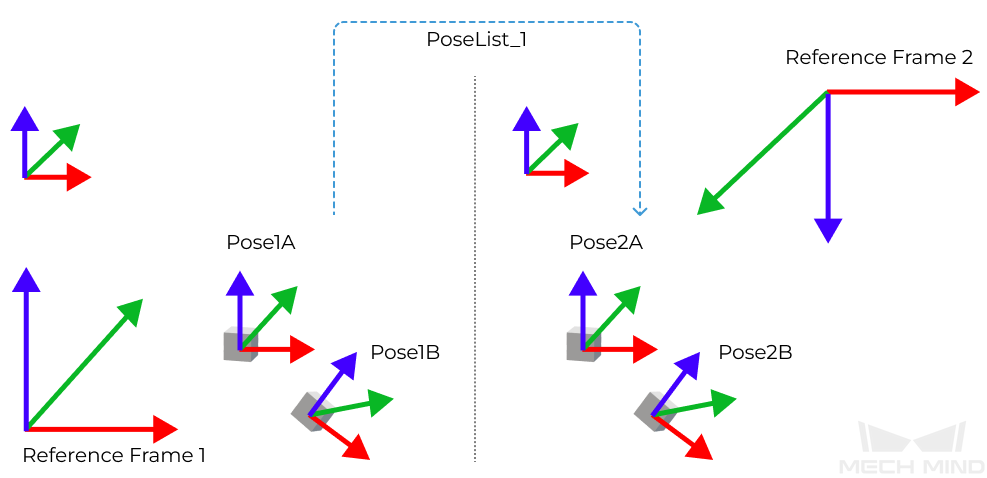
AllWithFirst: The poses of objects A and B are denoted as Pose1A and Pose1B, respectively, in the reference frame 1. When the transformation type is selected as AllWithFirst, and a reference pose list has been input, the transformed poses of object A and B, namely, Pose2A and Pose2B, respectively, in the reference frame 2 will be output. The first reference pose in the pose list is used in the transformation of all original poses. Please refer to the tuning example for the corresponding result.
-
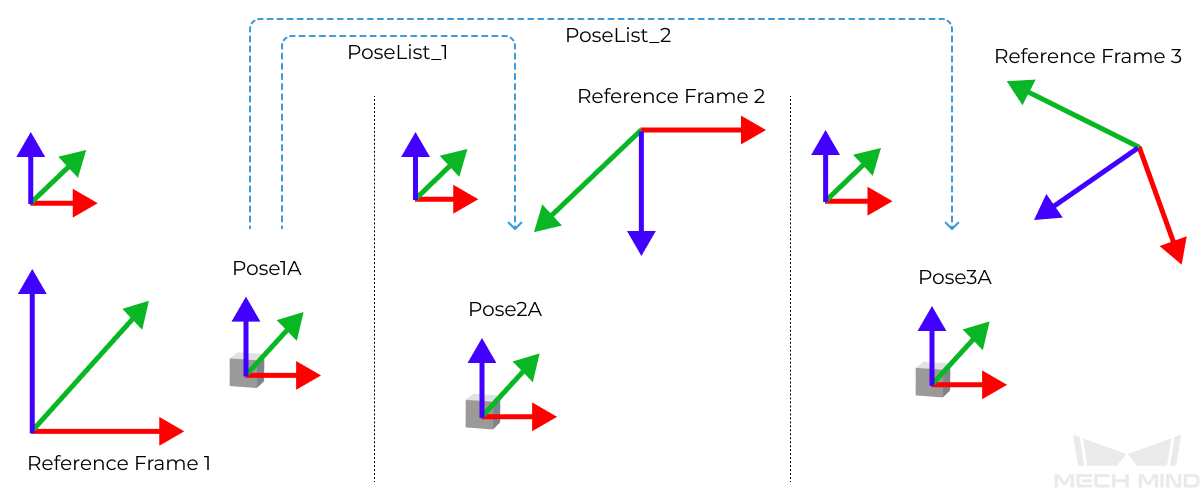
FirstWithAll: The poses of objects A and B are denoted as Pose1A and Pose1B, respectively, in the reference frame 1. When the transformation type is selected as FirstWithAll, and reference pose lists have been input, the transformed poses of object A, namely, Pose2A and Pose3A, in the reference frame 2 and reference frame 3, respectively, will be output. All reference poses in the pose lists are used in the transformation of the first original pose, which is Pose1A in this example. Please refer to the tuning example for the corresponding result.
-
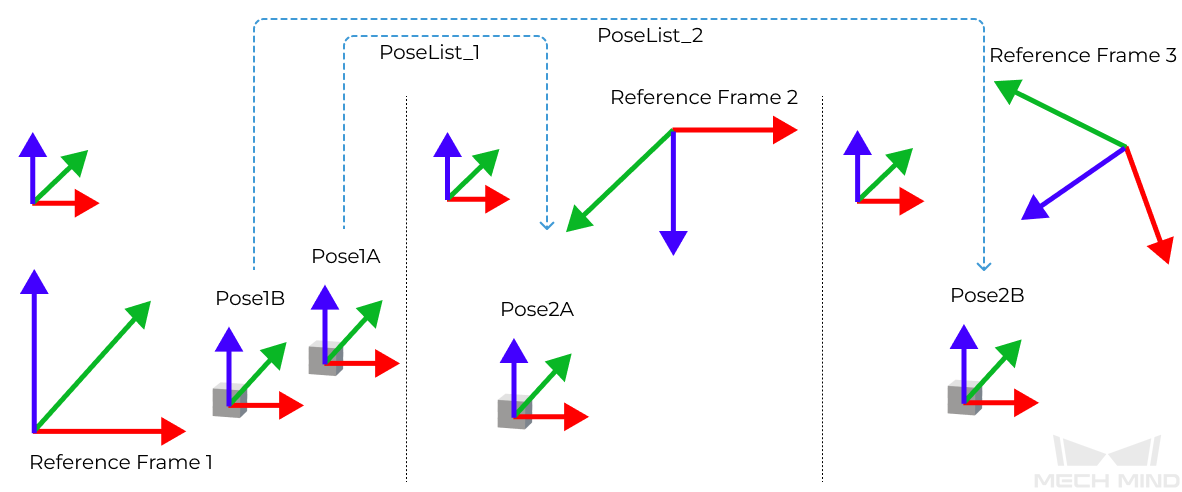
UseCorrespondenceInput: The poses of objects A and B are denoted as Pose1A and Pose1B, respectively, in the reference frame 1. When the transformation type is selected as UseCorrespondenceInput, and reference pose lists have been input, the transformed poses of object A and B, namely, Pose2A and Pose3B, in the reference frame 2 and reference frame 3, respectively, will be output. The reference poses in the pose list are used in the transformation of each original pose correspondingly. Please refer to the tuning example for the corresponding result.
-
Tuning Examples
Show Point Cloud In Selected Frame
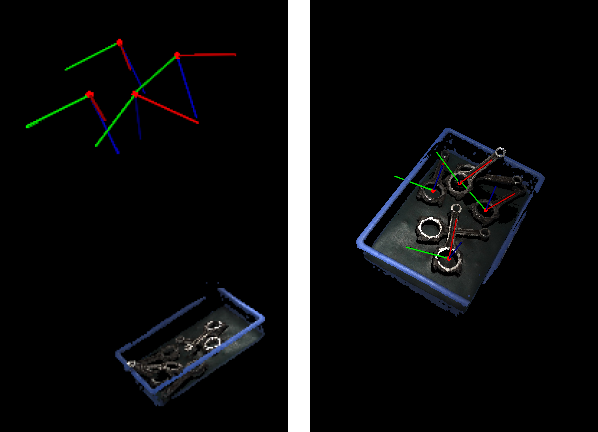
As shown below, the figure on the left shows the point cloud in the camera reference frame, and the figure on the right shows the point cloud in the robot reference frame.
Pose Type to Visualize
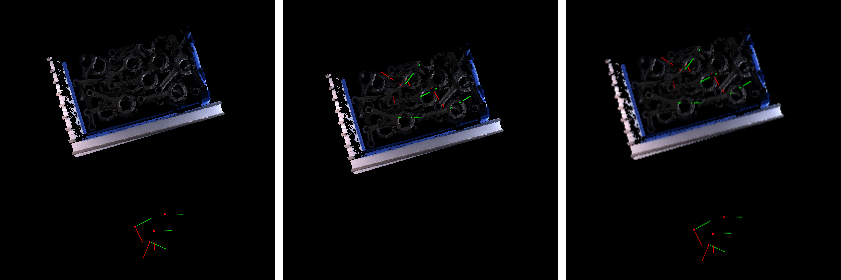
In the case of the robot reference frame, the visualized poses are as follows when the Pose Type to Visualize is set to After, Before, and All.
CameraToRobot
The following figure shows the results before (left) and after (right) pose transformation of CameraToRobot.
RobotToCamera
The following figure shows the results before (left) and after (right) pose transformation of RobotToCamera.