From Shape2DList to Pose2DList
Function
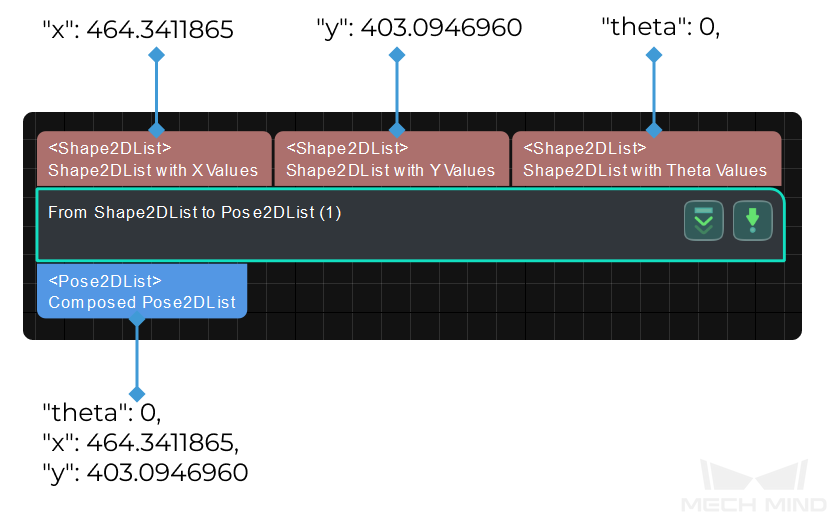
This Step is used to assemble a new 2D pose list by taking the lists of X values, Y values, and Theta values (Theta represents the tilt angle) from the three input 2D shape information lists respectively.
Usage Scenario
This Step is usually preceded by the Detect and Measure Line (to obtain the tilt angle of the line, Theta) and the Detect and Measure Circle Step (to obtain the X and Y coordinates of the center of the circle) to output more accurate 2D poses of the objects in the image, and then followed by the Record Criterion Pose and Calc Transformation Step to accurately align a group of objects in the image.
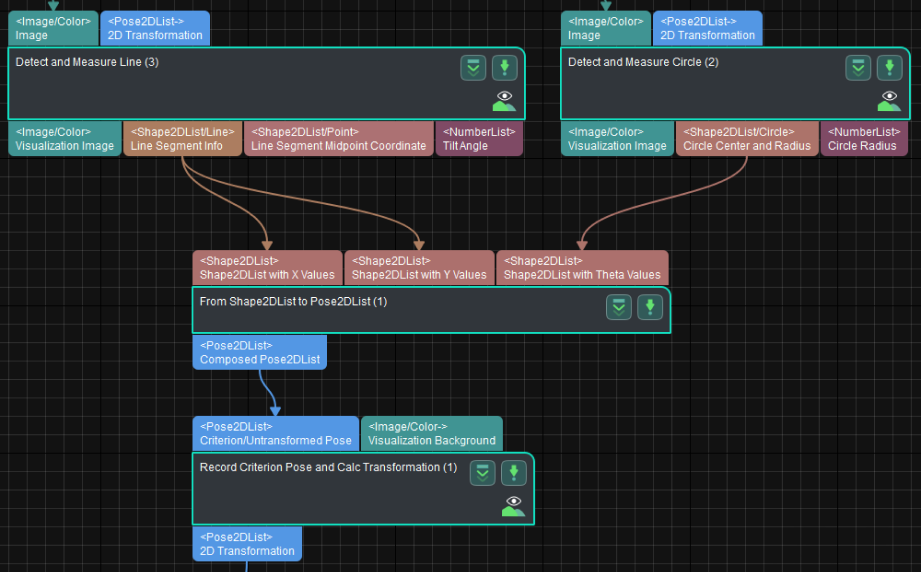
The above Step combination is usually applied after the Template Matching Step to make the results of the Template Matching Step more accurate. If the objects in each image are already nearly aligned, the Template Matching Step is not necessary anymore.