Check Robot DH Parameters
When the pose data transferred between the robot and the vision system is in the form of joint positions, the correctness of the DH parameters will affect the absolute accuracy of the robot. This section introduces the robot DH parameters and how to check them.
Introduction to DH Parameters
The robot DH parameters are used to describe the characteristics of robot joints and links. These parameters help us learn about the geometric and dynamic characteristics of the robot and therefore better control its motion.
Through the above parameters, we can know the shape and size of the robot and determine its position and orientation with different joint angles.
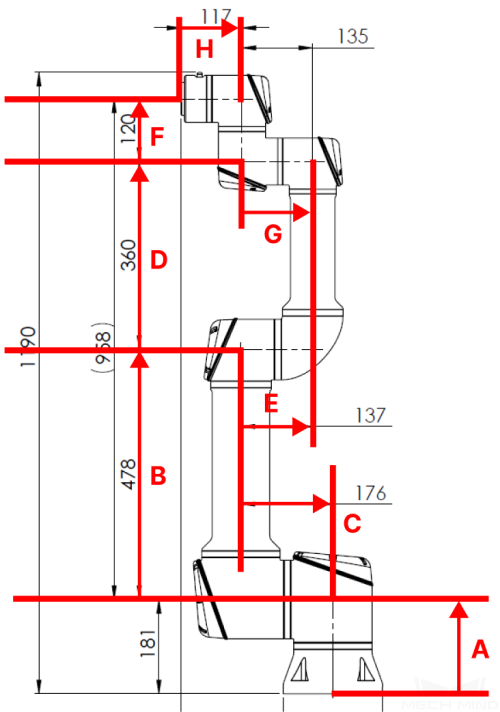
As an example, the DH parameters of a six-axis collaborative robot (similar to UR5) are shown below.
DH Parameter Usage Scenarios
In some picking scenarios, robot DH parameters will be used, such as:
-
Hand-eye calibration (Master-control communication) for some robots.
-
EIH scenarios that only receive robot joint positions.
-
Send the joint positions of a waypoint to the robot.
Check DH Parameters
When the pose data transferred between the robot and the vision system is in the form of joint positions, and the DH parameters of the real robot do not match those of the simulated robot, the robot accuracy error will be introduced. Then you need to check the robot DH parameters. The steps are as follows:
-
Consult the robot operation manual to view the real robot’s DH parameters.
-
Refer to the robot model library to view the DH parameters of the simulated robot.
-
Compare the DH parameters of the real robot and the simulated robot. If the DH parameters are not consistent, please modify the [robot]_algo.json file.
Please refer to Guide for Robot Model Parameter Verification for details.