Change Tool
Function
Switch TCP and tool models.
-
Software side: Switch TCP and tool models.
-
Robot side: Switch TCP. To switch tools on the real robot or change the status of the tools in actual situation, you should use this Step with the “Set DO” Step.
Parameter Description
Tool
Select the tool that you need to use currently.
Before selecting the tool, you need to add and configure the corresponding tool in project resource tree—Tools.
Application Examples
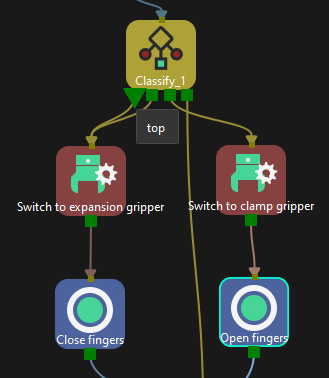
Take the example project of “Switch End Tools According to Pick Point Labels” for example.
For the workpiece of bearing pedestal in this example project, you can use expansion gripper to grasp the workpiece inside its central hole, and use finger gripper to grasp it through the edge of the tray. According to pick point types, add top, bottom, and edge labels in the “Classify” Step:
-
For workpieces with the top and bottom labels, close the fingers of the claw gripper, and then open the fingers to grasp the workpieces.
-
For workpieces with the edge label, open the fingers of the claw gripper, and then close the fingers to grasp the workpieces.