Extract 3D Points in Cylinder
Function
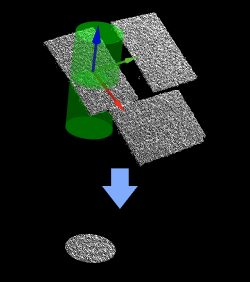
Extract point clouds inside specified cylinders. The point clouds outside the cylinders will be discarded.
Parameter Description
- Shapes Type
-
Default value: Ring.
List of values: Cylinder, Ring, and Sector.
Instructions: 3D points inside different shapes can be extracted according to actual needs. Once a shape is specified, 3D points inside this shape will be extracted.
Z Direction Properties
- Min Z Value
-
Default value: -100.000 mm
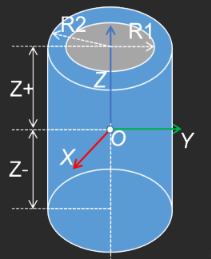
Instruction: This parameter is used to set the lower limit of distance threshold along Z axis of the reference frame, corresponding to Z- in the figure below. The unit is millimeters.
- Max Z Value
-
Default value: 100.000 mm
Instruction: This parameter is used to set the upper limit of distance threshold along Z axis of the reference frame, corresponding to Z+ in the figure below. The unit is millimeters.
Ring and Sector Radius Properties
- Inner Radius
-
Default value: 50.000 mm
Instruction: The minimum distance on XY-plane. It corresponds to R1 in the figure above. The unit is millimeters. To obtain a solid cylinder, this parameter needs to be set as 0.
- Outer Radius
-
Default value: 100.000 mm
Instruction: The maximum distance on XY-plane. It corresponds to R2 in the figure above. The unit is millimeters.
Sector Angle Properties
The following two parameters appear after choosing Sector in Shape Type, and they are used to configure the shape of the sector.
- Start Angle
-
Default value: 180°
Instruction: the start angle of the sector on XY-plane.
- End Angle
-
Default value: −180°
Instruction: the end angle of the sector on XY-plane.
Usage Settings for Input Clouds
- Check If Object inside Cylinder by Its Point Center
-
Default value: unselected.
Instruction: If this option is selected, the center of the object point cloud is used to check if it is inside the cylinder.
- Input Point Cloud Usage
-
Default setting: All
Value list: All, FirstOnly
Instruction: This parameter decides whether to only use the first input point cloud.