Calibration Troubleshooting and FAQs
Non-six-axis Robot Calibration
Four-axis Robot
Four-axis robots include truss/gantry robots, SCARA robots, and palletizing robots, etc.
Mech-Viz is only adapted to a small number of SCARA and palletizing robots (more robots will be supported in future).
-
Tip fixing issue when using the TCP touch method
Mount the sharp tip on the end of the robot and check whether the tip is securely fixed at one point and installed in the center of the flange by rotating the fourth axis. Since the TCP of the four-axis robot cannot be calibrated using the tool, you need to manually measure the XYZ values of the TCP.
-
Z-axis values of extrinsic parameters need to be adjusted for four-axis robots
When using the multiple random calibration board poses method, the lack of rotational degree of freedom will result in the lack of the rotational values during the calibration process. After the calibration is completed, you need to manually adjust the Z-axis value of the extrinsic parameters.
For details, refer to the how-to guide of the hand-eye calibration for four-axis robots.
-
Calibration instructions for truss/gantry robots
For the instructions on the hand-eye calibration for truss/gantry robots, refer to the section Hand-Eye Calibration for Truss/Gantry Robots.
Calibration for Seven-axis Robots/Six-axis Robots with Slide Rail/Five-axis Robots
|
The six-axis robot with slide rail mentioned here means that the slide rail is integrated into the robot teach pendant. Thus, it is equivalent to a seven-axis robot. |
The TCP touch method is recommended for the above three types of robots.
-
Requirements for calibration using the multiple random calibration board poses method for seven-axis robots
When there is no suitable sharp tip on site or the sharp tip cannot be mounted, the multiple random calibration board poses method can be used to calibrate the seven-axis robot.
During the calibration process, you need to restrict the movement of one of the axes and idealize it as a six-axis robot. The rest of the operations are roughly the same as the calibration of the six-axis robot.
How to Calibrate When the Euler Angle Convention of the Robot is Uncertain
When the Euler angle convention of the robot is unknown, use the "Get Euler angle convention" tool on the calibration interface during the pre-calibration configuration.
The detailed instructions are as follows:
-
Open Mech-Vision, and click the Camera Calibration (Standard) button in the toolbar. The Configuration before Calibration window will be prompted.
-
In the Select how to calibrate window, select the New calibration radio button, and then click the Next button.
-
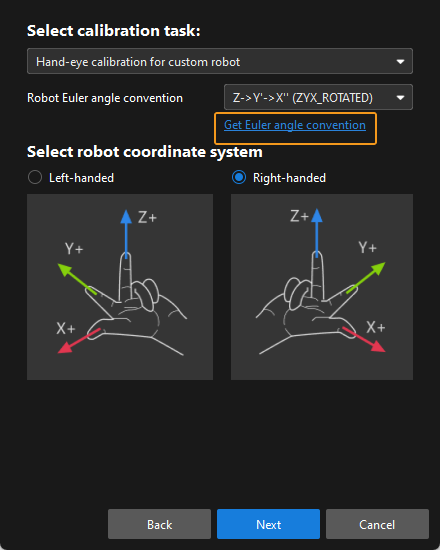
In the Select calibration task window, select Hand-eye calibration for custom robot from the drop-down list box, and click the Get Euler angle convention.
-
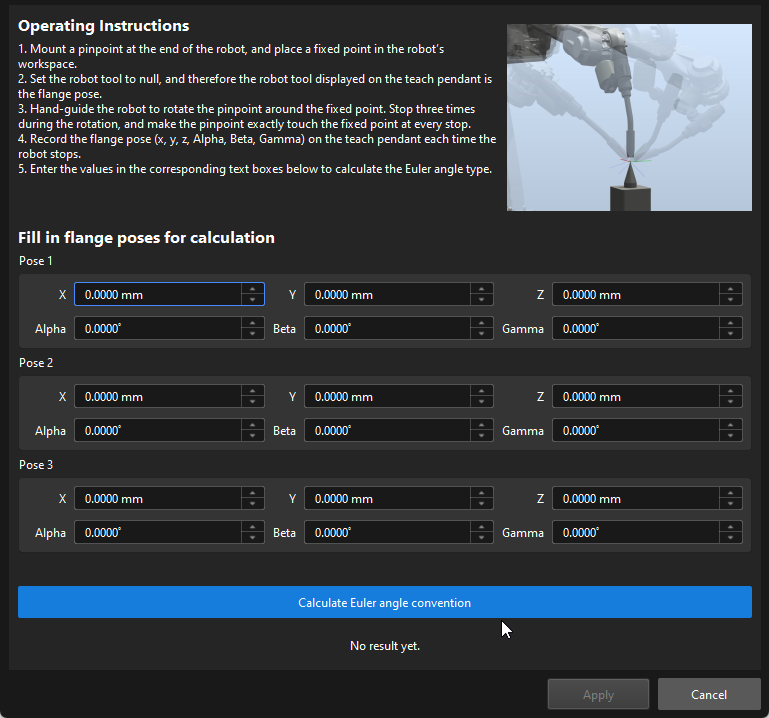
Follow the operating instructions of this tool to record and enter three robot flange poses, and then click Calculate Euler angle convention to get the Euler angle convention of the robot.
How to Calibrate If There Is No Suitable Point on the Working Plane
Since the accurate Euler angle convention of the robot is unknown, the Euler angle cannot be inputted correctly when the TCP touch method is used for calibration.
In this case, switch the pose type on the robot teach pendant to TCP to obtain the pose of the tip.
Let the tool tip touch the cross center points of three calibration circles in turn, read the values of XYZ on the teach pendant and input them. Choose any Euler angle convention and enter any constant value. Make sure that the Euler angles of the three input poses are the same.
Intolerable Point Cloud Fluctuation on Multiple Calibration Points, Which Cannot be Improved by Adjusting Camera Parameters
Check the calibration board to see if there are crosses which may cause large point cloud fluctuations, as shown in the following figure:
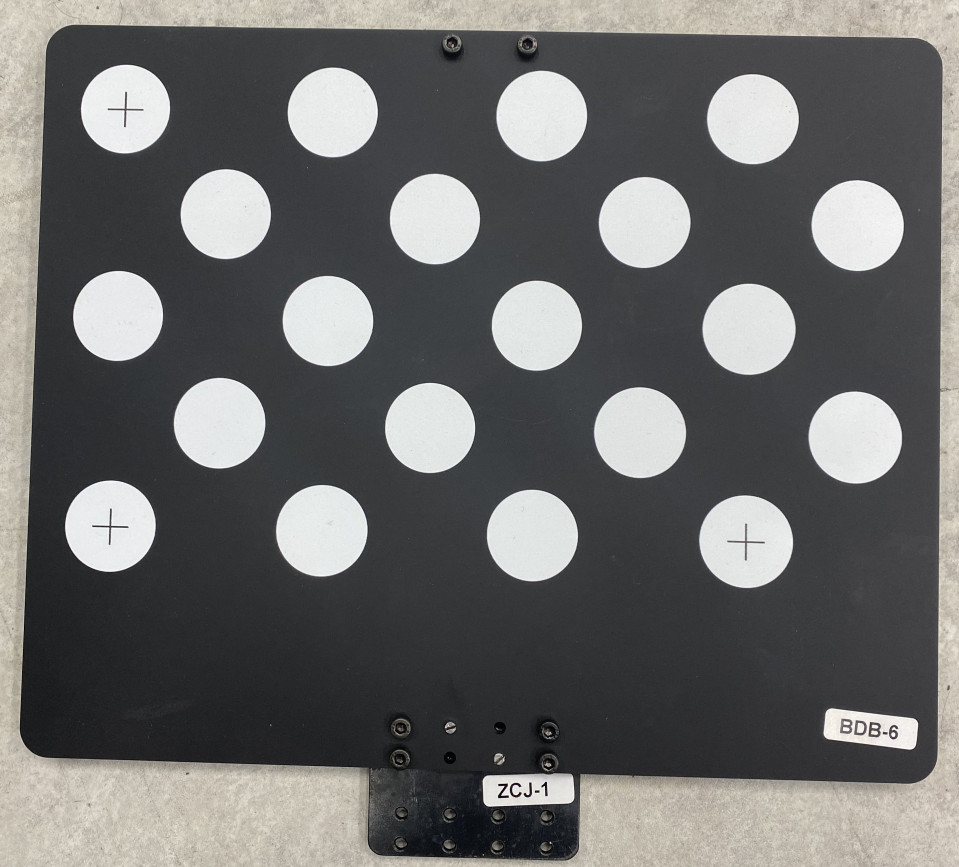
Cut out a few circles from A4 paper and cover them over the center of each calibration circle with a cross (do not cover the edge of the circles). The crosses’ effect on point cloud fluctuation should be reduced after it is done.
If the above method still does not solve the issue, try to manually add more poses and delete the poses with severe point cloud fluctuations.
Misunderstandings about Calibration Path
-
The more calibration points, the better
Too many calibration points may introduce abnormal points, leading to an increase in the overall error ratio.
When using the factory compensation parameters to calculate extrinsic parameters, determine the number of points on each layer according to the camera focal length, the size of the calibration board, etc:
-
When the focal length is 300 to 2000 mm, it is recommended to use a 2*2 configuration, with four calibration points per layer. The number of layers is generally three. Use four layers for high stacks.
-
When the focal length is 2000 to 3500 mm, it is recommended to use a 3*3 configuration, with nine calibration points per layer. The number of layers is generally three. Use four to five layers for high stacks.
-
The calibration range has to cover the entire working area
When the factory compensation parameters are used, calibration should be carried out in layers around the center of focus and around the focal length of the camera.
When the factory compensation parameters are not used or when it is impossible to calibrate around the camera’s focal length, it is recommended to calibrate in the entire working area.
-
The extrinsic parameters in the calibrated area are accurate, while those in the excluded area are inaccurate
The error point cloud generated after calibration shows the extrinsic parameter error in the calibrated area. However, it does not mean that the extrinsic parameters of the excluded area must be inaccurate. On the contrary, when the factory compensation parameters are used, the extrinsic parameters of the excluded area are also accurate.