Calibration Troubleshooting and FAQs
How to Perform Calibration on a 7-Axis Robot?
|
The 7-axis robots mentioned here do not include 6-axis robots equipped with a sliding rail. |
The TCP touch method is recommended for the 7-axis robots.
If no suitable sharp tip is available on-site or the sharp tip cannot be mounted, the multiple random calibration board poses method can be employed. During the calibration process, you need to restrict the movement of one of the axes and idealize the 7-axis robot as a 6-axis robot. The rest of the operations are roughly the same as the calibration on the 6-axis robot.
How to Calibrate When the Euler Angle Convention of the Robot is Uncertain
When the Euler angle convention of the robot is unknown, use the "Get Euler angle convention" tool on the calibration interface during the pre-calibration configuration. The detailed instructions are as follows:
-
Open Mech-Vision, and click the Camera Calibration button in the toolbar. The Configuration before Calibration window will be prompted.
-
In the Select how to calibrate window, select the New calibration radio button, and then click the Next button.
-
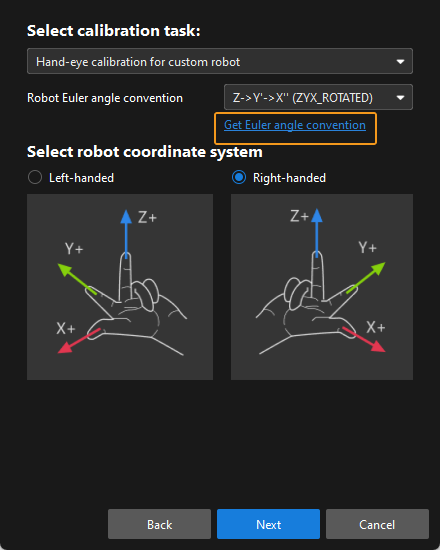
In the Select calibration task window, select Hand-eye calibration for custom robot from the drop-down list box, and click the Get Euler angle convention.
-
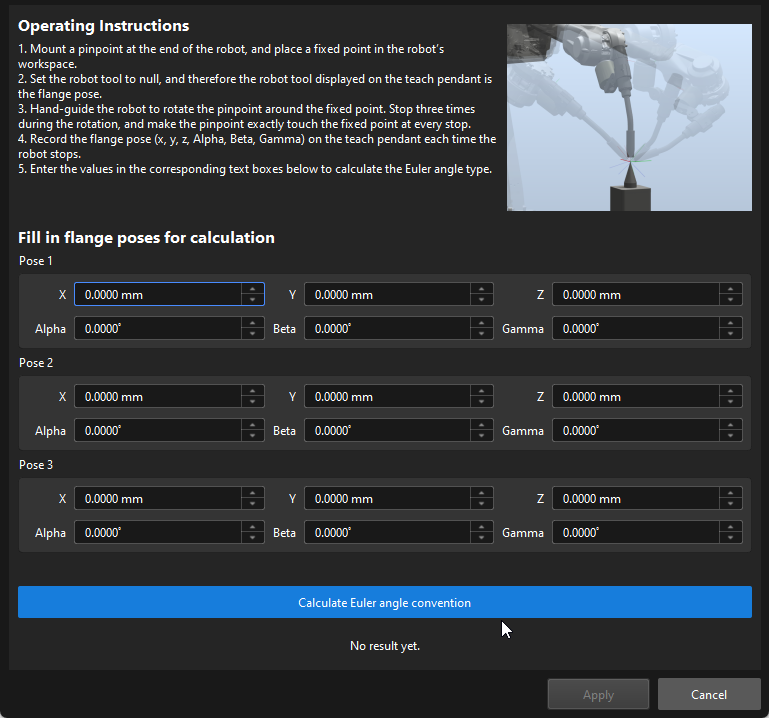
Follow the operating instructions of this tool to record and enter three robot flange poses, and then click Calculate Euler angle convention to get the Euler angle convention of the robot.