Configure collision detection
Collision configuration is used to detect and avoid possible collisions. By default, collisions between any two of the robot, robot tool, and scene objects will be detected. Once Enable collision detection with point cloud is enabled, the collision between the input point cloud and the robot tool will be detected.
-
Click the Collision Configuration button in the toolbar and Enable collision detection with point cloud.
Set the following parameters based on the project’s allowed level of collisions.
-
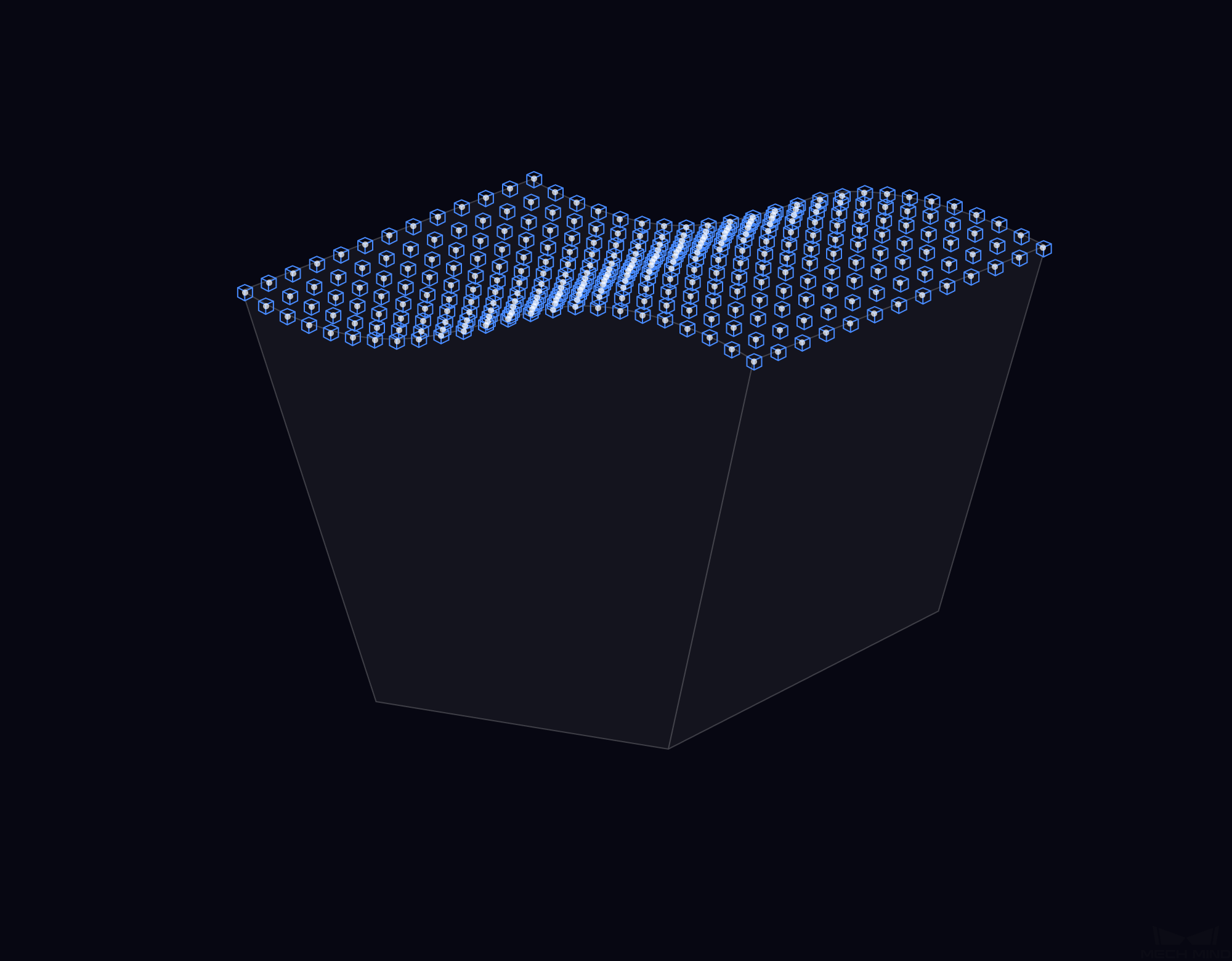
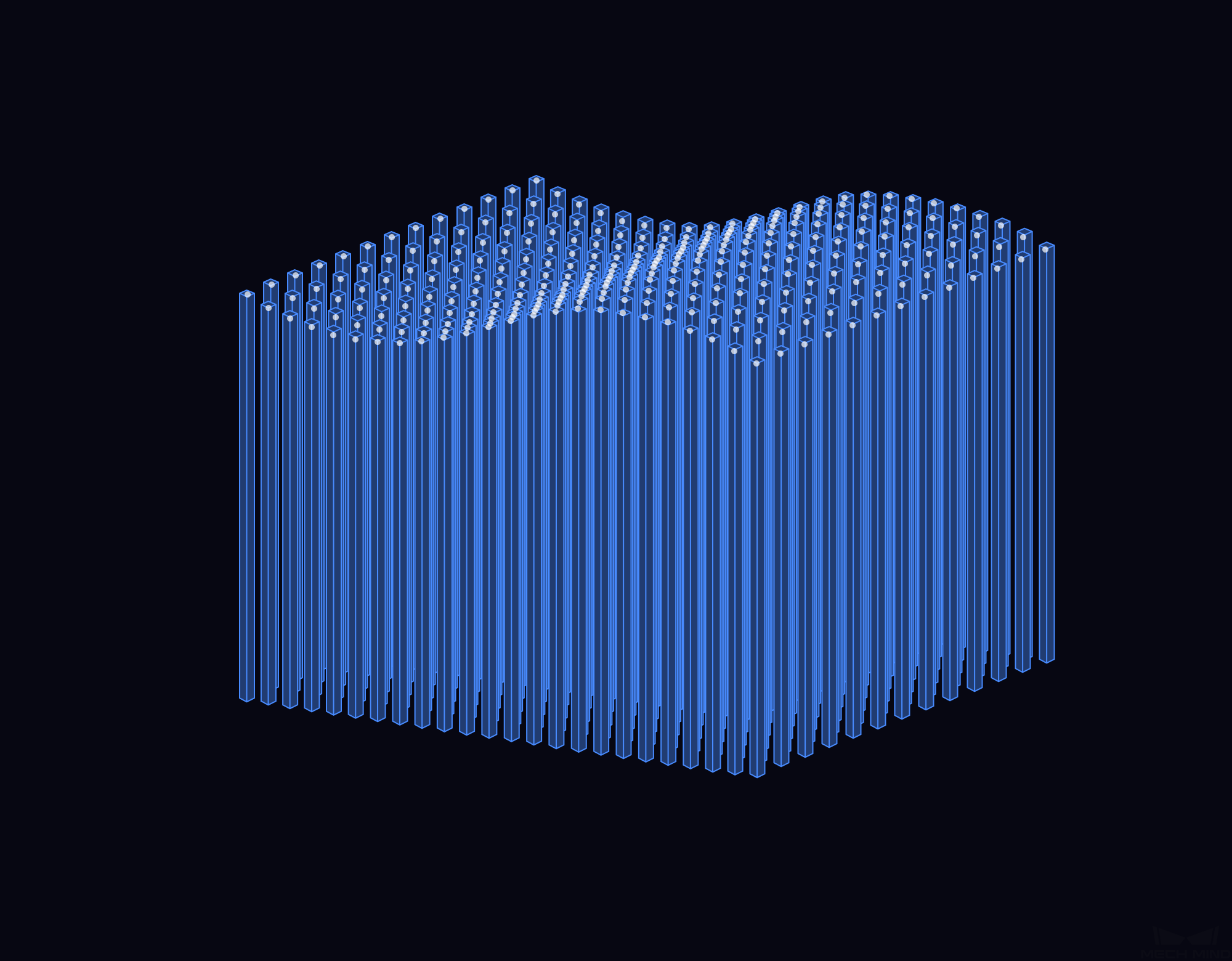
Point cloud form for collision detection
Point cloud cube Point cloud column Fill the surface of the point cloud with cubes for collision detection calculations.
Fill the space below the point cloud with square columns for collision detection calculations.
-
Tool-point cloud collision volume upper limit
When the collision volume between the tool and the point cloud is above the set threshold, it will be assumed that a collision occurs; otherwise, it will be assumed that no collision occurs.
-
Point cloud collision record
-
Record: The plan history will record the positions and quantity of the point clouds where collisions occur. When the user views the planning history, the recorded point cloud will be highlighted in the 3D simulation area. However, selecting Record will slow down the execution speed.
-
Do not record: The user will not be able to trace which part of the point cloud was involved in collision(s) in the plan history. On the other side, the execution speed is higher when not recording the point cloud in collision.
-
-
-
After you finish the configuration, click OK.