Application Examples
To save time when creating a collision model for the end tool, it’s not always necessary for the convex hulls you create to replicate every detail of the original model. You can omit certain details based on the specific requirements of the model.
Before creating a convex model, evaluate the model to clarify the function of each part, then proceed to construct the convex hull for each structure. To ensure effective collision detection, the parts of the convex hull model that come into contact with the target object (such as grippers and flange connectors) must be carefully crafted, closely matching the actual structure of the object as much as possible. Parts of the convex hull model that do not come into contact with the target object and are not connected to the robot (such as cameras, sensors, connectors, etc.) can be roughly modeled, with the convex hull being slightly larger than the actual object.
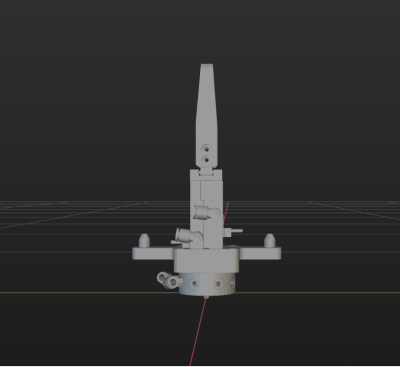
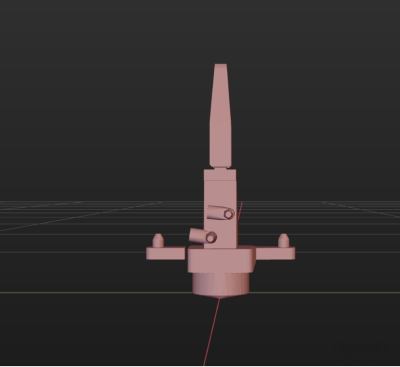
Please refer to the examples below, which illustrate the end tool models before and after they have been enclosed by convex hulls.
-
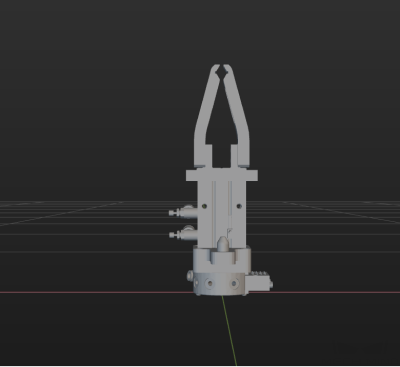
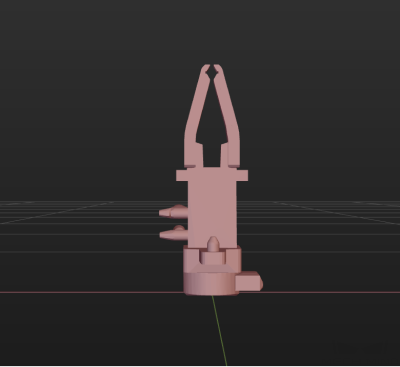
Example 1:
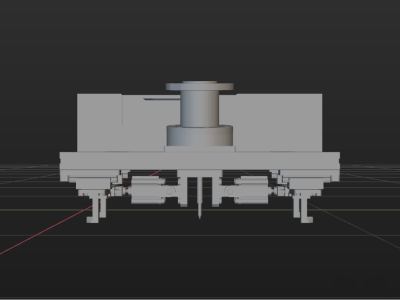
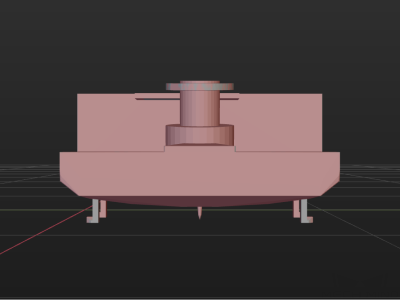
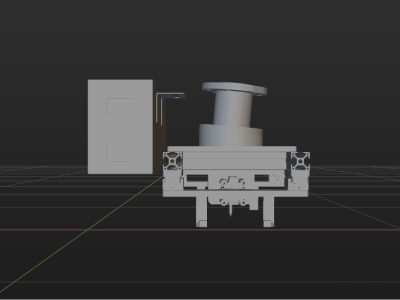
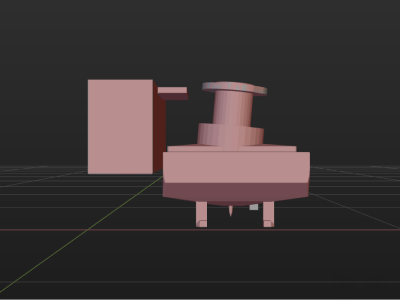
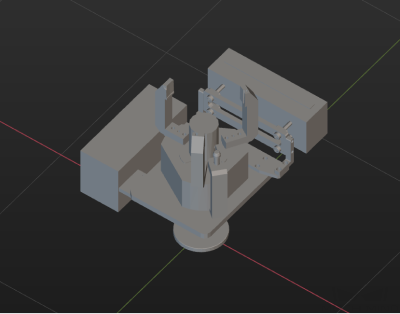
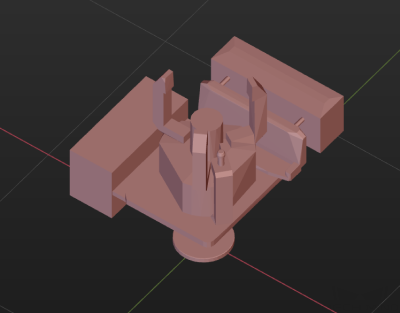
View Before After Custom view
Front view
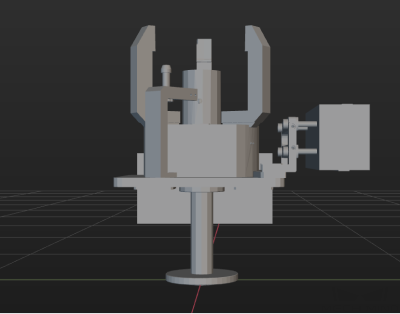
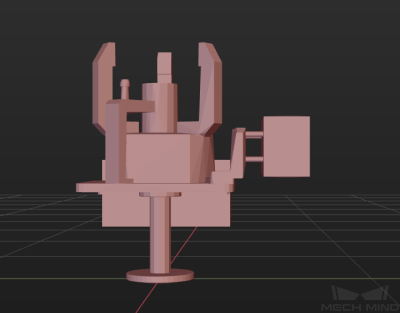
Side view
-
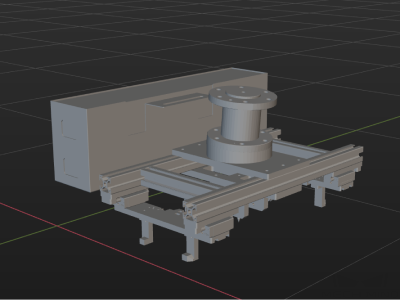
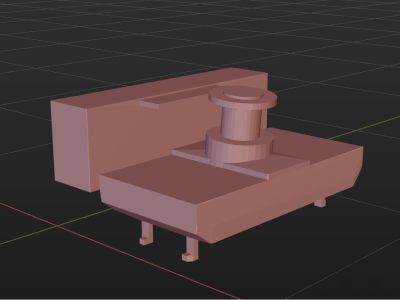
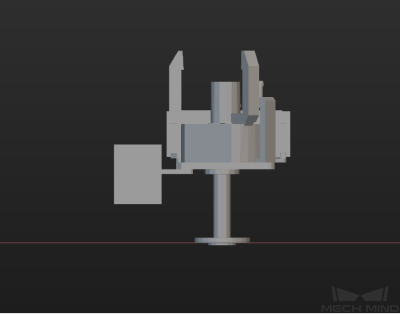
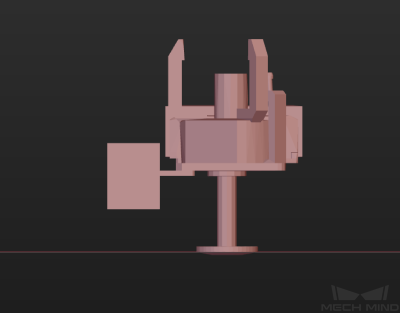
Example 2:
View Before After Custom view
Front view
Side view
-
Example 3:
View Before After Custom view
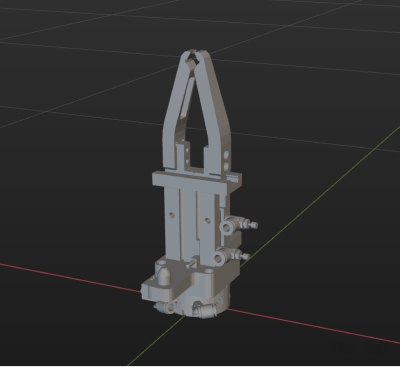
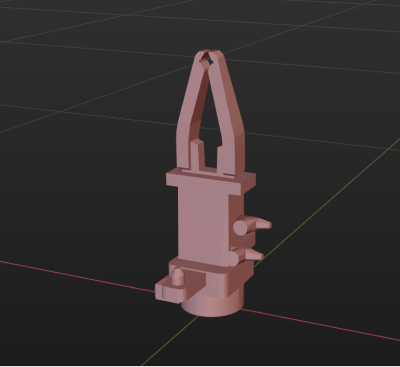
Front view
Side view