Vision Move
Function
This Step plans the robot’s path and pose for picking the target object based on the vision result returned by the vision service.
| Exit Port | Description |
|---|---|
Success |
The path was planned successfully. |
Plan failure |
The path planning failed. |
Other failures |
There are no available poses for planning. Possible causes: Mech-Vision did not output poses. The poses output by Mech-Vision cannot meet the requirement. |
Usage Scenario
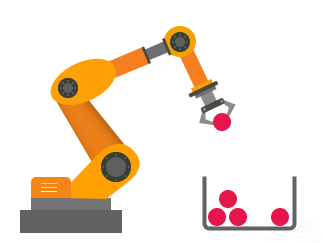
According to the actual usage scenarios and tool types, the picking methods are divided into Regular picking, Box depalletizing and Picking with array.
Please select the picking method according to the actual situation. In addition, the parameters for each picking method are different. See the table below for more information.
Picking Method |
Description |
Illustration |
|
The objects to be picked are industrial parts, delivery packages, etc.
|
|
||
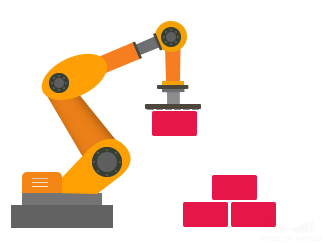
Box depalletizing |
The objects to be picked are cartons, turnover boxes, or sacks, and only one object will be picked at once.
|
|
|
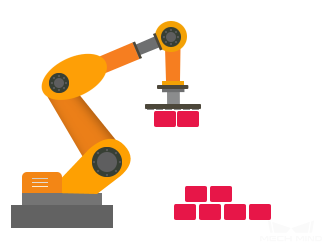
The objects to be picked are cartons, turnover boxes, or sacks, and multiple object can be picked at once.
|
|
||
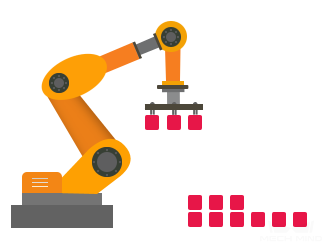
The robot tool has multiple ends and each end picks one target object specifically. At present, this method only supports multiple ends that are arranged in a single row. |
|
||