Point Cloud Shape Detector
Function
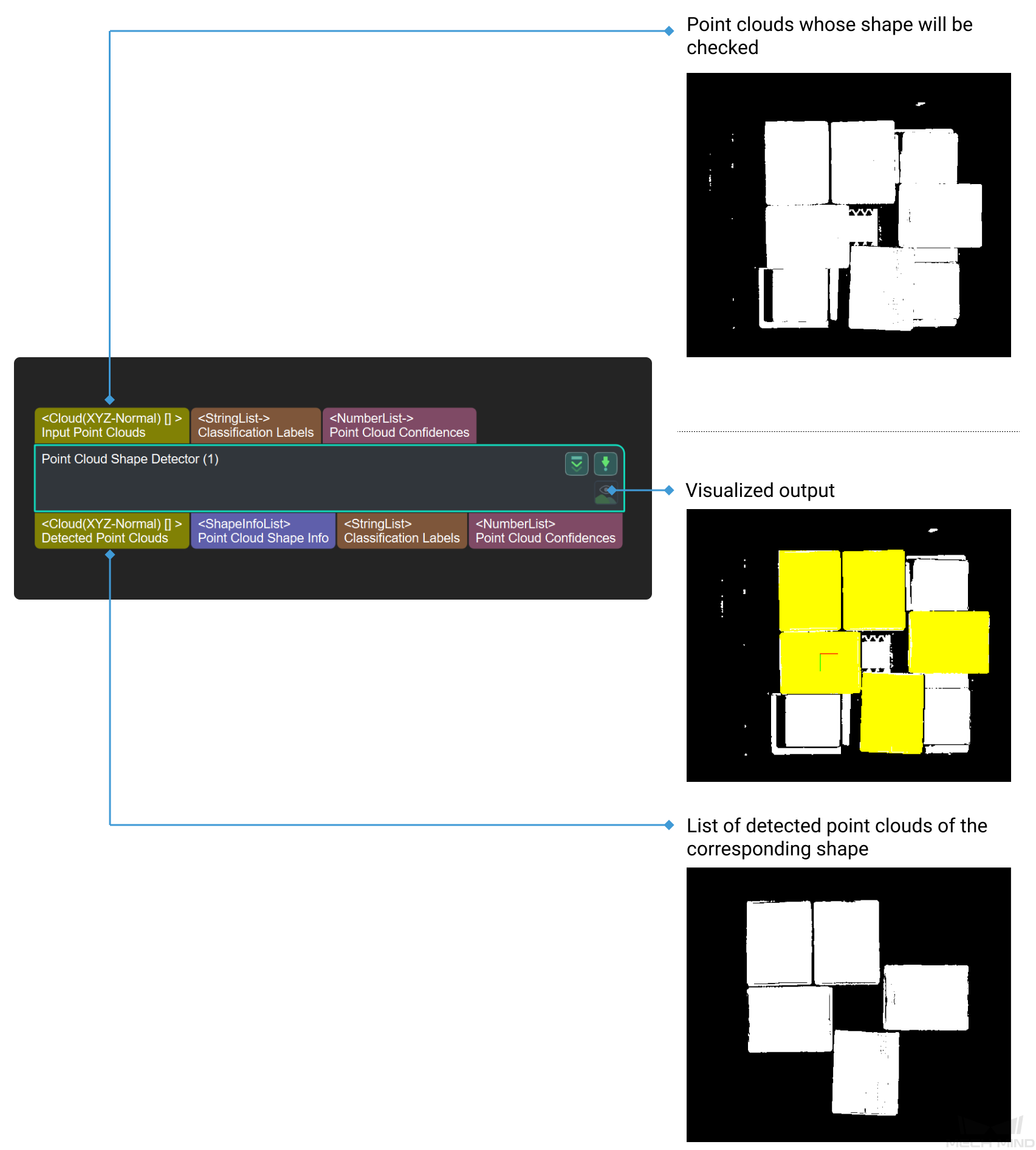
This Step detects and outputs point clouds of a plane or cylindrical shape; the shape can be selected in the parameter.
Usage Scenario
This Step is usually used to detect objects with flat and cylindrical shapes.
If you need to calculate the pick points of cylinder point clouds, this Step can be followed by the Calc Cylinder Poses Step.
Parameter Description
Shapes to Detect
Instruction: This parameter is used to choose the target shape type, plane, cylinder, and sphere included.
Default setting: Plane.
Suggested setting: Set according to the actual scenarios.
Detection Settings
- Detector
-
Instruction: This parameter is used to choose the type of detector used during detection, including Method 1 and Method 2. (Upon optimization, there will be only Method 1.)
Default setting: Method 1
Suggested setting: Method 2
- Normal Deviation
-
Instruction: This parameter is used to set the upper limit of the angle difference (in °) between the normal of point in the image and the normal of projected theoretically corresponding standard shape.
Default value: 30°
Suggested value: Set according to the actual scenarios.
- Acceptable Point Cloud Fluctuation
-
Instruction: This parameter is the upper limit (in mm) of the acceptable range of the point cloud fluctuation error.
Default value: 5.000 mm
Suggested value: [3.000, 5.000].
- Min Cluster Interval
-
Instruction: This parameter is the lower limit (in mm) of the interval of point cloud connectivity judgement. When this parameter becomes large, points far away from each other will be clustered into one class; when it becomes smaller, however, points close to each other will be clustered into different classes.
Default value: 5.000 mm
Suggested value: Set according to the actual scenarios.
- Point Cloud Quantization Resolution
-
Instruction: This parameter is used to control the number and intensity of points. The unit is millimeters. Greater number and intensity correspond to higher accuracy and longer computing time; when this parameter is set lower, the point cloud becomes sparser, which may decrease calculation accuracy but save computation time.
Default value: 5.000 mm
Suggested value: Usually twice the value of “Min Cluster Interval”.
- Number of Results per Point Cloud
-
Instruction: This parameter determines the number of final outputted result for every point cloud.
Default value: 1
Suggested value: Set according to the actual scenarios.
- Sort by Point Counts
-
Instruction: This parameter decides whether to sort the final result according to the size of point cloud or not.
Default setting: selected.
Suggested value: Set according to the actual scenarios.
- Success Probability (0–1.0)
-
Instruction: This parameter is used to adjust the success rate of detection, ensuring that there is a sufficient success rate to detect the corresponding shape.
Default value: 0.9900
Suggested value: Set according to the actual scenarios.
Candidates Filter
- Min Shape Point Count Ratio (0–1.0)
-
Instruction: This parameter is used to set the lower limit of the ratio between the detected points belonging to one shape and the total number of points with shape labels. The points that have shape labels and are under this limit will be filtered out.
Default value: 0.1000
Suggested value: Set according to the actual scenarios.
- Min Mean Dist Error (0–1.0)
-
Instruction: This parameter is used to set the lower limit of the mean distance deviation(in mm) between real points and the points of corresponding detected theoretical shape. When this parameter becomes larger, point clouds with huge deviations will be retained; when it becomes smaller, however, point clouds with small deviations will be filtered out.
Default value: 10.000 mm
Suggested value: Set according to the actual scenarios.
- Min Mean Angle Error (0–90)
-
Instruction: This parameter is used to set the lower limit of the mean angle deviation (in °) between real points and the points of corresponding detected theoretical shape. When this parameter becomes larger, point clouds with huge deviations will be retained; when it becomes smaller, however, point clouds with small deviations will be filtered out.
Default value: 45.0000
Suggested value: Set according to the actual scenarios.
Cylinder Property
- Min Radius
-
Instruction: This parameter is used to set the lower limit of the cylinder (in mm). Cylinders with a radius lower than this limit will be filtered out.
Default value: 10.000 mm
Suggested value: Set according to the actual scenarios.
- Max Radius
-
Instruction: This parameter is used to set the upper limit of the cylinder (in mm). Cylinders with a radius greater than this limit will be filtered out.
Default value: 100.000 mm
Suggested value: Set according to the actual scenarios.
- Optimize Cylinder Positions
-
Instruction: This parameter decides whether to optimize the shape parameters of cylinder, center point and axis included.
Default Value: Unselected.
Suggested Setting: Selected.