Target Object Editor
Function
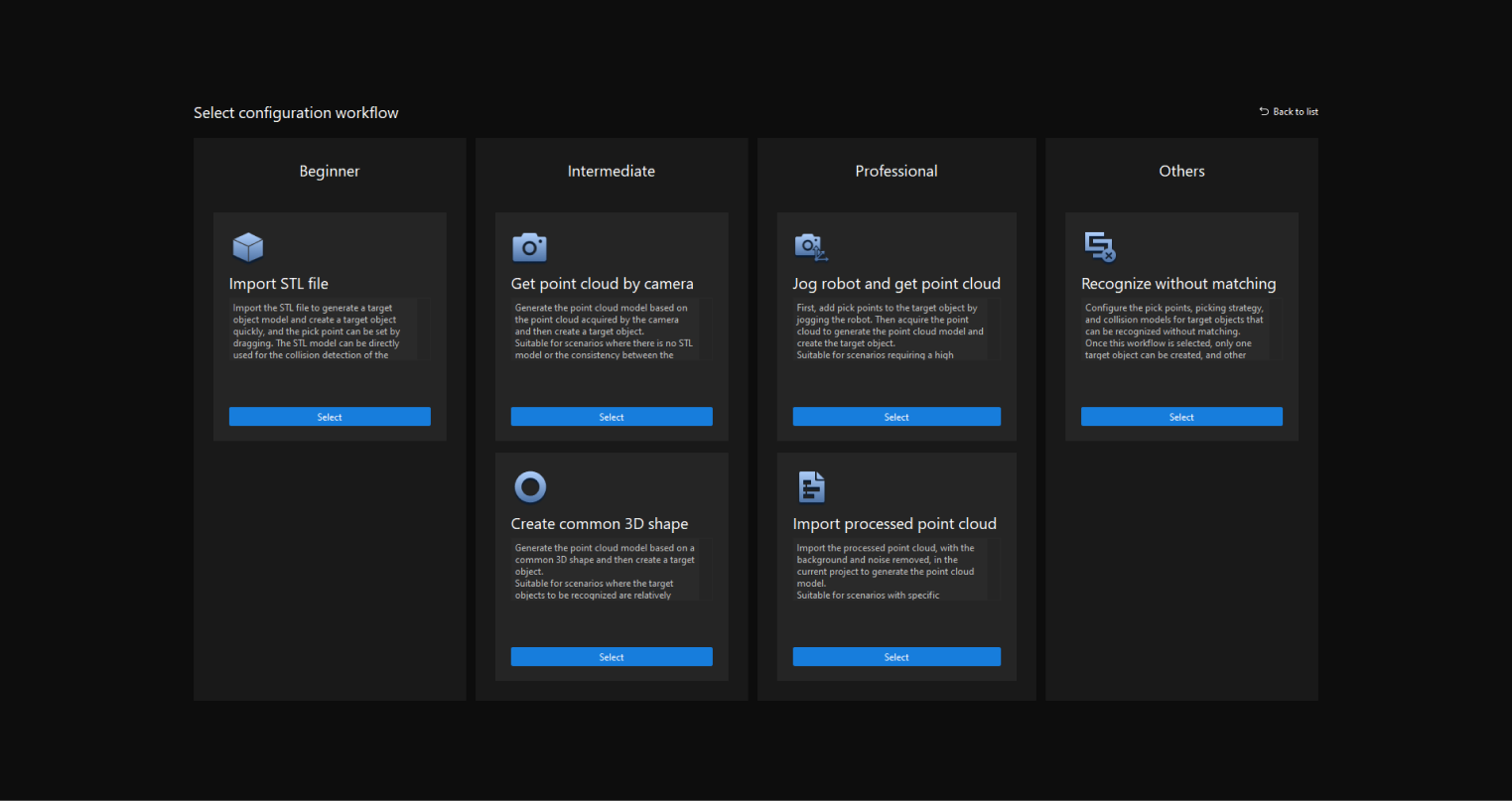
The target object editor integrates features for configuring target objects, including generating and editing the point cloud models, setting pick points, and setting up collision models. Six guided configuration workflows are available, as shown in the figure below. You can follow the step-by-step instructions to complete the target object configuration.
The main features and description of the target object editor are shown in the following table:
| No. | Main Function | Description |
|---|---|---|
1 |
Configuration workflows with clear and detailed instructions |
Six guided configuration workflows are provided in the target object editor. You can follow the guidance and select the appropriate workflow to complete the target object configuration. |
2 |
Real-time visualization of the configuration result |
The target object editor provides a visualization area where you can preview the target object configuration results in real time or make certain configurations directly within the area, such as adjusting pick points. |
3 |
More integrated target object configurations |
Help me revise this paragraph: The target object editor consolidates various target object settings, such as symmetry settings, object center point settings, pick point settings, and collision model settings. With this tool, you can manage all these tasks in one unified interface. |
Reading Guide
You can refer to the table below to learn about various workflows for target object configuration and choose the appropriate one based on the actual application scenario.
For details on the specific target objects applicable to each configuration workflow, please refer to the method to make point cloud models.
| Configuration Workflow | Suitable Scenario |
|---|---|
Import STL file to generate point cloud model and configure the pick point manually |
Suitable for scenarios where the consistency between the point cloud acquired by the camera and the STL model file is high. |
Suitable for scenarios where there is no STL model or poor consistency between the acquired point cloud and the STL model file. |
|
Generate the point cloud model based on the common 3D shapes, and configure the pick point manually |
Suitable for scenarios where the shapes of the target objects to be recognized are relatively regular, matching cylinder or cuboid. |
Suitable for scenarios requiring a high picking accuracy. |
|
Import processed point cloud to generate point cloud model and pick points |
Suitable for scenarios with special requirements for point cloud model preprocessing, reducing the effort of point cloud editing. |
Configure pick points in scenarios that do not require matching |
Suitable for carton or sack palletizing and depalletizing scenarios. |